

зонталей. Отрезок KL определяет направление проекций линии пересечения двух заданных плоскостей.
2.8 Перпендикулярность прямой и плоскости, двух плоскостей
Условие перпендикулярности прямой и плоскости и перпендикулярности двух плоскостей базируется на теореме о проекции прямого угла. Адаптируя теорему к решению метрических задач на определение расстояния от точки до плоскости, определение расстояния от точки до прямой линии или на построение плоскости, параллельной заданной на определенном расстоянии, сформулируем условие перпендикулярности прямой и плоскости.
Прямая l (l1,l2) перпендикулярна плоскости, если она перпендикулярна двум пересекающимся прямым уровня (например, горизонтали и фронтали), принадлежащим данной плоскости.
l1 h1
l2 f2
Рассмотрим примеры решения типовых метрических задач на применение условия перпендикулярности прямой и плоскости.
Пример 1. Определить расстояние от точки N до плоскости Q(mIIn) (рисунок 2.35).
Алгоритм решения задачи:
1. Провести анализ условия задачи. (Кратчайшее расстояние от точки до прямой определяется перпендикуляром, опущенным из точки N на плоскость Q.)
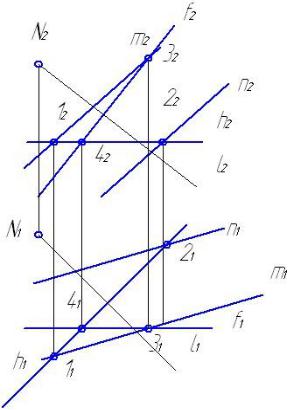
2. Для того чтобы выполнить условие перпендикулярности прямой и плоскости необходимо сначала в плоскости построить горизонталь h(h1, h2) и фронталь f(f1, f2), а затем построить линию l(l1, l2), перпендикулярную плоскости Q (рисунок 2.35).
Рисунок 2.35 – Линия перпендикулярная плоскости
3.Найти основание перпендикуляра, т.е. точку пересечения построенной линии l(l1, l2) с заданной плоскостью Q. Для построения точки К заключаем, например, фронтальную проекцию линии l2 во фронтально проецирующую плоскость Σ. Определяем проекции линии пересечения линии l с соответствующей проекцией линии пересечения двух плоскостей (Q∩∑). Определяем положение проекций точки К1 и К2.
4.Определить натуральную величину отрезка NK как гипотенузу прямоугольного треугольника (рисунок 2.36).
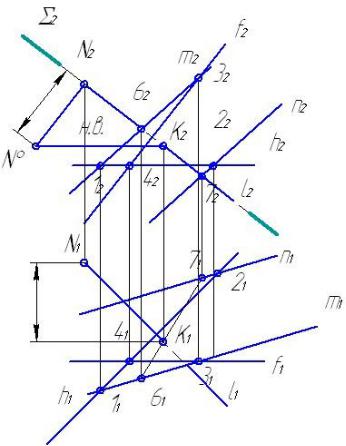
Рисунок 2.36 – Проекции расстояния от точки до плоскости
Пример 2. Определить расстояние от точки А до прямой n. Алгоритм решения задачи:
1.Анализ условия задачи. Проанализировав условие задачи констатируем, что кратчайшее расстояние от точки до прямой измеряется перпендикуляром, опущенном из точки А на прямую n. Поскольку заданная прямая n (n1, n2) является прямой общего положения, то для решения задачи необходимо выполнить дополнительные построения.
2.Через проекции точки А(А1,А2) строим плоскость Σ (h ∩ f), перпендикулярную прямой n (n1, n2).
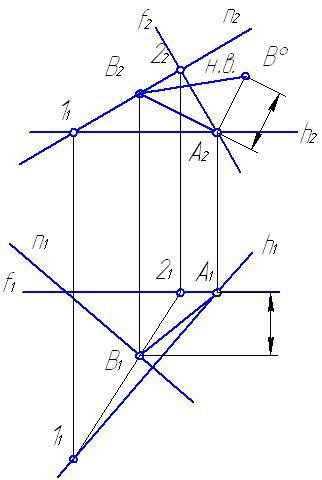
3.Определяем точку пересечения заданной прямой n(n1, n2) с плоскостью Σ (h ∩ f) и находим проекции отрезка прямой А1 В1 и А2 В2, как проекций расстояния от точки А до прямой n.
4.Строим натуральную величину расстояния от точки А до прямой n (рисунок 2.37).
Рисунок 2.37 – Расстояние от точки A до прямой n
Пример 3. Построить плоскость Θ, параллельную плоскости Σ (ΔАВС), на расстоянии 25 мм от нее.
Алгоритм решения задачи:
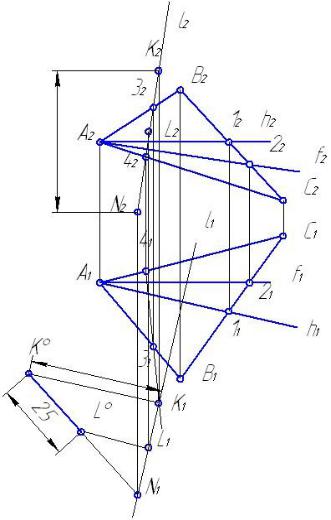
1.Анализ условия задачи. Плоскость будет построена на расстоянии 25 мм от плоскости Σ (ΔАВС). Следовательно нужно построить перпендикуляр к плоскости.
2.Для построения линии, перпендикулярной плоскости, в плоскости задаем линии уровня – горизонталь h(h1, h2) и фронталь f(f1, f2) и строим линию l(l1, l2), перпендикулярную плоскости Σ (ΔАВС) (рисунок 2.38).
Рисунок 2.38 – Положение точки L
3. Находим основание перпендикуляра, т.е. точку К(К1,К2) пересечения линии l(l1, l2) с плоскостью Σ (ΔАВС).
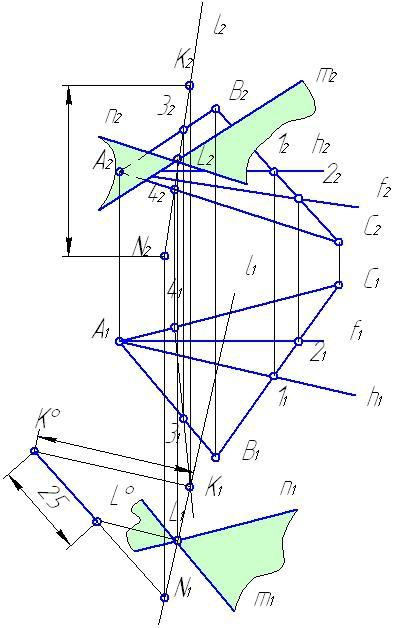
4.Выбираем на линии l(l1, l2) произвольную точку N(N1,N2) и определяем расстояние от выбранной точки до плоскости (N1Kº).
5.Находим на прямой l(l1, l2) положение точки L(L1, L2), имеющей удаление от плоскости 25 мм.
6.Через точку L(L1, L2) строим плоскость Θ(m∩n), параллельную заданной плоскости Σ (ΔАВС) (рисунок 2.39)
Рисунок 2.39 – Плоскость параллельная заданной на нужном расстоянии
Вопросы для самоконтроля по теме 2:
1.Какое положение точка может занимать относительно прямой линии?
2.Когда точка принадлежит прямой линии?
3.Как могут располагаться прямые линии друг относительно друга?
4.Какие точки называются конкурирующими?
5.Продолжите предложение: Прямой угол проецируется на фронтальную плоскость проекций без искажения, если он образован двумя пересекающимися прямыми, одна из которых прямая общего положения, а вторая ……..
6.Как определить натуральную величину отрезка прямой общего положения?
7.Каково условие перпендикулярности прямой линии и плоскости?
8.Каково условие перпендикулярности двух плоскостей?
9.Когда прямая параллельна плоскости?
10.Когда две плоскости параллельны?
11.Каково условие принадлежности прямой линии плоскости?
12.Когда точка принадлежит плоскости?
13.Каков алгоритм нахождения точки пересечения прямой линии с плоскостью?
14.В чем состоит суть способа вспомогательных плоскостей посредников при нахождении линии пересечения двух плоскостей?
15.Какая плоскость называется проецирующей?
3 ПРЕОБРАЗОВАНИЕ ПРОЕКЦИЙ
3.1 Сущность и основные способы преобразования чертежа
Решение позиционных и метрических задач в начертательной геометрии значительно упрощается, если прямые и плоские фигуры занимают положение проецирующих прямых и плоскостей, или прямых и плоскостей уровня.
Необходимым условием упрощения решения задач является построение новых дополнительных проекций, которые позволяют получить либо вырожденные проекции отдельных элементов, либо эти элементы в натуральную величину. Построение дополнительных проекций называют преобразованием чертежа.
Преобразование может быть выполнено следующими способами:
1.Переменой (заменой) плоскостей проекций с условием, что рассматриваемый объект или его элементы займут одно из частных положений относительно новой системы плоскостей проекций;
2.Вращением геометрических объектов в пространстве вокруг проецирующей оси так, чтобы они занимали какое-либо частное положение относительно плоскостей проекций.
3.Плоскопараллельным перемещением объекта, при котором, способ вращения вокруг проецирующей оси и перемещение объекта, добиваются перехода от объекта общего положения к объекту частного положения;
4.Вращением геометрических объектов в пространстве вокруг линии уровня так, чтобы они занимали положение либо прямой уровня, либо плоскости уровня.
3.2 Теория и алгоритмы решения основных позиционных и метрических задач
Суть способа перемены плоскостей проекций состоит в переходе от данной системы плоскостей проекций к новой. При этом отрезки прямых и плоские фигуры сохраняют свое положение, а их новые проекции получаются за счет введения дополнительных плоскостей проекций.
При перемене плоскостей проекций обязательно сохраняется взаимная перпендикулярность двух плоскостей проекций – новой и незаменяемой.
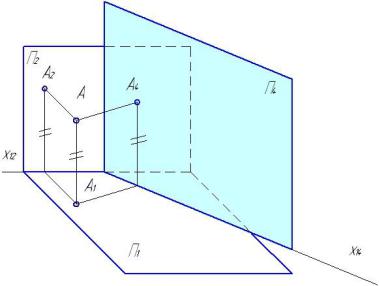
Рассмотрим механизм перемены плоскостей проекций на примере преобразования с точкой (рисунок 3.1.).
Рисунок 3.1 – Механизм перемены плоскости проекций П2 на П4
На эпюре это преобразование представлено на рисунке 3.2. Зададим две проекции точки А (А1, А2) в системе плоскостей проекций П1 и П2. Введем положение плоскости П4. Из незаменяемой проекции точки А – А1
проводим линию связи, перпендикулярную линии следа плоскости П4. Поскольку высота точки не меняется при переходе от системы плоскостей проекций П1 – П2 к системе плоскостей П1 – П4, то эта высота измеряется на поле П2 и откладывается на поле П4 от линии пересечения плоскостей по направлению новой линии связи.
Рисунок 3.2 – Механизм перехода от системы П1- П2 к П1- П4 на эпюре
Замена одной из плоскостей проекций не всегда приводит к окончательному решению поставленной задачи, поэтому последовательно рассмотрим механизм перехода от системы плоскостей проекций П1 - П2 к П1- П4, а затем к П4- П5. (рисунок 3. 3).
Для получения проекции точки А на плоскости проекций П5 необходимо выполнить последовательный перевод точки сначала в плоскость П4, а затем в плоскость П5. Для выполнения построения заменим плоскость П2 на плоскость П4.

Рисунок 3.3 – Механизм перехода от системы П1- П2 к П4- П5 на эпюре
Проекция точки А4 получается следующим образом: из незаменяемой проекции точки А1 проведем линию связи, перпендикулярную линии пересечения плоскостей П1 – П4 и отложим от нее расстояние, измеренное от заменяемой проекции точки до линии пересечения плоскостей П1 – П2. При переходе в систему плоскостей проекций П4 - П5 заменяется плоскость П1 на П5. Из незаменяемой проекции точки А4 проводим линию связи, перпендикулярную линии пересечения плоскостей П4 – П5. От этой линии откладываем расстояние, измеренное от заменяемой проекции точки А1 до линии пересечения плоскостей П1 – П4. В результате построим проекцию точки А5.
Другой способ преобразования чертежа – способ вращения. Он состоит в том, что заданная система плоскостей проекций остается неизменной, а фигуру вращают вокруг неподвижной оси до тех пор, пока она займет частное положение относительно плоскостей проекций, в частности станет параллельной или перпендикулярной одной из плоскостей проек-
ций. Вращение производят вокруг осей, перпендикулярных или параллельных плоскостям проекций.
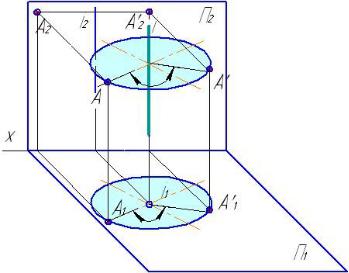
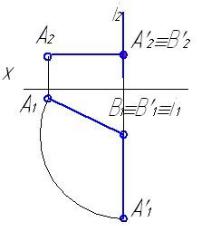
Остановимся на механизме вращения точки вокруг проецирующей оси. Пусть точка А вращается вокруг горизонтально проецирующей оси i. При этом точка будет описывать окружность с центром, проходящим через ось вращения i ( i1,i2). При вращении траектория точки А представляет собой окружность, плоскость которой параллельна горизонтальной плоскости проекций (рисунок 3. 4).
Рисунок 3. 4 - Вращение вокруг горизонтально проецирующей оси
На эпюре процесс вращения точки изображается следующим образом. Выбирают ось вращения i (i1, i2). На горизонтальную плоскость проекций эта ось проецируется в точку i1. Из центра i1 проекция точки А1 описывает окружность, поворачиваясь на какой-либо угол, пока не займет положений А1'. Фронтальная проекция точки А2 при этом перемещается по горизонтальной прямой до нового положения точки А2'.
Таким образом, при вращении вокруг горизонтально-
проецирующей оси горизонтальная проекция точки перемещается по окружности, а фронтальная – по прямой, перпендикулярной к проекции оси врашения (рисунок 3.5).
Рисунок 3.5 – Алгоритм вращения вокруг горизонтально проецирующей оси
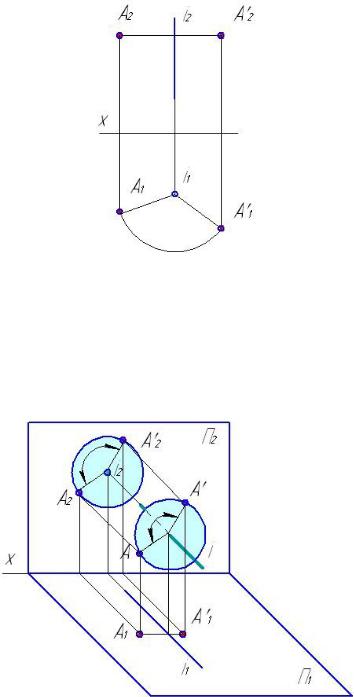
При вращении точки вокруг фронтально проецирующей оси, точкой описывается траектория в виде окружности, плоскость которой параллельна фронтальной плоскости проекций (рисунок 3. 6).
Рисунок 3.6 – Вращение вокруг фронтально проецирующей оси
При вращении вокруг фронтально проецирующей прямой фронтальная проекция точки описывает окружность, а горизонтальная перемещается по прямой, перпендикулярной к оси вращения. Алгоритм вращения точки вокруг фронтально проецирующей оси представлен на рисунке 3.7.
Рисунок 3.7 – Алгоритм вращения вокруг фронтально проецирующей оси
3.3.Способ перемены плоскостей проекций. Решение основных задач
Каким бы способом не осуществлялись преобразования чертежа главные задачи преобразования могут быть сведены к следующим:
1.Преобразование, при котором прямая линия общего положения становится прямой уровня.
2.Преобразование, при котором прямая уровня становится проецирующей прямой.
3.Преобразование, при котором плоскость общего положения становится проецирующей плоскостью.
4.Преобразование, при котором проецирующая плоскость становится плоскостью уровня.
Рассмотрим решение основных задач преобразования чертежа способом перемены плоскостей проекций.
Задача 1. Преобразовать прямую общего положения в прямую уров-
ня.
Для того чтобы прямая общего положения оказалась прямой уровня, необходимо ввести новую плоскость проекций П4, которая была бы ей параллельна. Заменим, например, плоскость П2 на плоскость П4 (рисунок 3.8).
Плоскость П4 располагается параллельно незаменяемой проекции отрезка прямой А1В1. Полученная проекция отрезка прямой А4В4 является прямой уровня, следовательно, эта проекция – есть натуральная величина отрезка. Решение данной задачи позволяет определить угол наклона отрезка прямой АВ к горизонтальной плоскости проекций - α.
Рисунок 3.8 – Преобразование прямой общего положения в прямую уровня
Задача 2. Преобразовать прямую уровня в проецирующую прямую.
Для того чтобы прямая линия уровня стала проецирующей (т.е. проецировалась бы на какую-либо плоскость проекций точкой), новая плоскость проекций должна быть ей перпендикулярна.
Перпендикулярность же на комплексном чертеже сохраняется лишь к прямой уровня. Поэтому новую плоскость проекций П4 выбирают перпендикулярной к соответствующей проекции линии уровня, т.е. к натуральной величине отрезка АВ (рисунок 3.9).
Рисунок 3.9 – Преобразование прямой уровня в проецирующую
Задача 3. Преобразовать плоскость общего положения в проецирую-
щую.
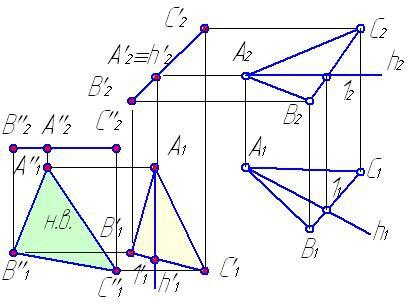
Для того чтобы плоскость общего положения оказалась проецирующей, необходимо чтобы новая система плоскостей проекций была ей перпендикулярна. Плоскость будет перпендикулярной к заданной плоскости в том случае, если она перпендикулярна к какой-нибудь линии уровня этой плоскости. Поэтому для того чтобы выбрать положение новой плоскости П4 , необходимо определиться какую из плоскостей проекций будем заменять. Например, заменим плоскость П2 на плоскость П4 (рисунок 3.10). В горизонтальной плоскости проекций без искажения проецируется гори-

зонтальная проекция горизонтали h1, поэтому плоскость П4 выстраиваем ей перпендикулярно.
На плоскости П4 треугольник АВС занимает проецирующее положе-
ние.
Рисунок 3.10 – Преобразование плоскости общего положения в проецирующую плоскость
Задача 4. Преобразовать проецирующую плоскость в плоскость уровня.
Для того чтобы заданная плоскость оказалась плоскостью уровня, необходимо плоскость П4 расположить ей параллельно (рисунок 3.11).
Рисунок 3.11 – Преобразование проецирующей плоскости в плоскость уровня
Для того чтобы плоскость общего положения преобразовать в плоскость уровня, необходимо выполнить два преобразования: сначала плоскость общего положения преобразовать в проецирующую, а затем, введя еще одну плоскость П5, преобразовать проецирующую плоскость в плоскость уровня.
3.4 Способ вращения вокруг проецирующей оси. Решение основных задач
Задача 1. Преобразовать прямую общего положения в прямую уров-
ня.
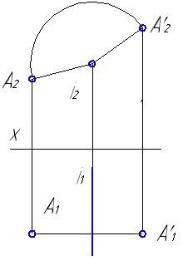
Для того решения задачи необходимо выбрать положение оси вращения. Выберем в качестве оси вращения, например, горизонтально проецирующую прямую. В этом случае поворот будет осуществляться в горизонтальной плоскости проекций. Угол поворота прямой определяется условием задачи: прямую нужно повернуть до положения линии уровня, в данном случае до положения фронтальной линии уровня (рисунок 3.12).
Рисунок 3.12 – Преобразование прямой общего положения в прямую уровня способом вращения
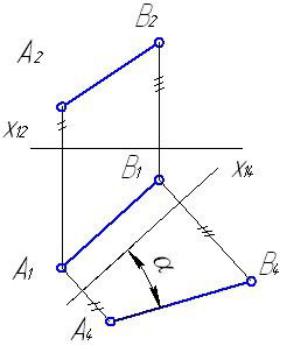
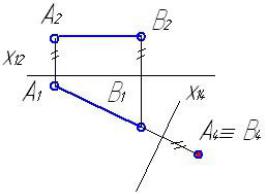
Задача 2. Преобразовать прямую уровня в проецирующую прямую.
При выполнении вращения следует выбрать положение оси вращения. В данном случае в качестве оси вращения следует выбрать горизонтально проецирующую ось и определить угол поворота прямой. Угол поворота определен условием задачи (рисунок 3.13).
Рисунок 3.13 – Преобразования прямой уровня в проецирующую прямую методом вращения
Задача 3. Преобразовать плоскость общего положения в проецирую-
щую.
Решение задачи начинают с выбора оси вращения. В качестве оси вращения выберем, например, горизонтально проецирующую прямую. В этом случае вращение следует выполнять в горизонтальной плоскости проекций. Угол повора плоскости треугольника вокруг горизонтально проецирующей оси будет задавать горизонтальная проекция горизонтали, лежащей в заданной плоскости (рисунок 3.14).
Рисунок 3.14 – Преобразование плоскости общего положения в проецирующую методом вращения
Задача 4. Преобразовать проецирующую плоскость в плоскость уровня.
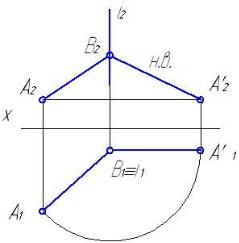
Выберем положение оси вращения. В данном случае следует выбрать горизонтально проецирующую ось вращения. Угол поворота объекта определяет поворот заданной плоскости до положения фронтальной плоскости уровня (рисунок 3.15).
Рисунок 3.15 – Преобразование проецирующей плоскости в плоскость уровня методом вращения
3.5 Способ плоско параллельного перемещения
Способ плоскопараллельного перемещения состоит в том, что плоскости проекций остаются неизменными, а объект поворачивают вокруг проецирующей оси до тех пор, пока он займет частное положение относительно плоскостей проекций и производят его перемещение. В зависимости от условий задач, объект следует преобразовать так, чтобы он располагался относительно плоскостей проекций перпендикулярно или параллельно.
Задача 1. Преобразовать плоскость общего положения в плоскость уровня.
Рисунок 3.16 – Способ плоскопараллельного перемещения
Вопросы для самоконтроля по теме 3:
1.В чем сущность способа перемены плоскостей проекций?
2.Можно ли прямую общего положения преобразовать в прямую уровня, используя одно преобразование?
3.Как выбирается направление проецирования для преобразования плоскости общего положения в проецирующую плоскость?
4.В чём отличие способа перемены плоскостей проекций от способа плоскопараллельного перемещения?
5.Сколько раз прямая общего положения должна поменять своё положение относительно плоскостей проекций П1, П2, чтобы стать фронтально-проецирующей прямой?
6.В чем суть способа вращения вокруг проецирующей прямой?

4МНОГОГРАННИКИ
4.1Общие сведения о многогранниках. Задание многогранников на комплексном чертеже
Многогранники, представляющие простейшие геометрические формы, являются основополагающими при конструировании инженерных сооружений. Многогранные формы нашли широкое применение в конструировании деталей машин и механизмов в технике, а также в различных архитектурных сооружениях.
Наибольший практический интерес представляют призмы, пирамиды и выпуклые однородные многогранники, все грани которых представляют собой правильные и равные многоугольники – тела Платона (тетраэдр – 4, октаэдр – 8, икосаэдр – 20 правильных треугольников; гексаэдр (куб – 6 правильных прямоугольников); додекаэдр – 12 правильных пятиугольников). Многогранник называется выпуклым, если он расположен с одной стороны от плоскости любой своей грани.
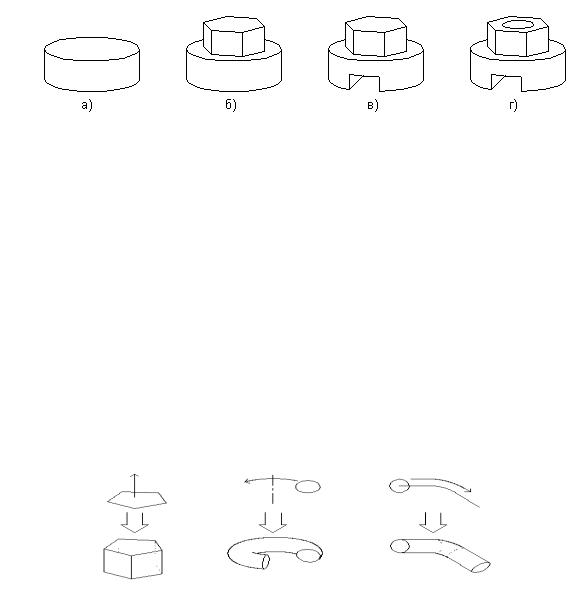
Многогранником называется тело, ограниченное плоскими многоугольниками. Эти многоугольники называются гранями (рисунок 4.1).
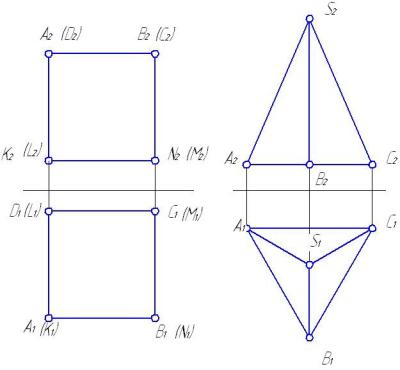
Рисунок 4.1 – Примеры многогранников
Совокупность всех граней многогранника называют его поверхно-
стью.
Грани пересекаются по прямым линиям, называемым ребрами. Ребра пересекаются в точках, называемых вершинами.
Чертежи многогранников должны быть обратимыми. Этого можно добиться, если соблюдаются определенные условия расположения ребер многогранника в проекциях.
На чертеже многогранники изображаются проекциями своих вершин и ребер. На рисунке 4.2 заданы прямая четырехгранная призма АВСDКLMN и трехгранная пирамида SABC. Призма называется прямой, если ее боковые грани и ребра перпендикулярны основанию. Прямая призма называется правильной, если ее основание – правильный многоугольник.
Рисунок 4.2 – Задание многогранников на эпюре

4.2 Пересечение многогранников плоскостью и прямой линией
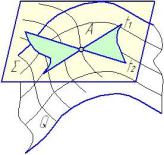
Линия пересечения многогранника плоскостью представляет собой плоский многоугольник (рисунок 4.3).
Рисунок 4.3 – Пересечение многогранника плоскостью
Линию сечения многогранника плоскостью можно построить двумя способами.
Первый способ. Находят вершины искомого многоугольника как результат пересечения ребер многогранника с секущей плоскостью.
Второй способ. Находят стороны искомого многоугольника как результат пересечения граней многогранника с секущей плоскостью.
В первом случае приходится многократно решать задачу на построение точки пересечения прямой с плоскостью, во втором – на построение линии пересечения двух плоскостей. В тех случаях, когда секущая плоскость или поверхность находятся в частном положении, задача существенно упрощается, поскольку на одной из плоскостей проекций проекция линии сечения совпадет либо с проекцией секущей плоскости (рисунок 4.4), либо с вырожденной проекцией поверхности многогранника (рисунок 4.5).
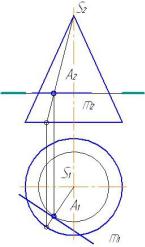
Для построения линии пересечения трехгранной пирамиды фронтально проецирующей плоскостью необходимо найти точки пересечения каждого ребра пирамиды SABC с фронтально проецирующей плоскостью ∑. В результате построения получим треугольник DFE. Если поверхность общего положения пересекается фронтально проецирующей плоскостью, то фронтальная проекция линии сечения (треугольника) совпадет с фронтальной проекцией секущей плоскости ∑2. Фронтальные проекции вершин линии сечения (D2, F2, E2) определяются как результат пересечения каждого ребра пирамиды с секущей плоскостью. Спроецировав точки, определяющие линию сечения, на горизонтальную плоскость проекций на проекции соответствующих ребер получим горизонтальную проекцию искомой линии сечения (D1,F1, E1).
Рисунок 4.4 - Пересечение пирамиды проецирующей плоскостью
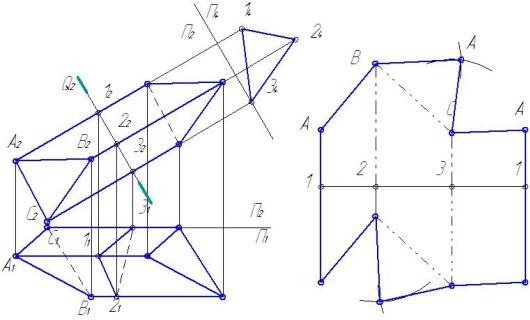
Для построения сечения прямой призмы ABCD плоскостью общего положения Q(a||b) нужно построить стороны искомого многоугольника
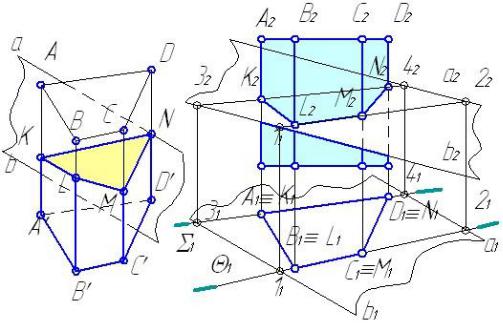
KLMN как результат пересечения граней многогранника с плоскостью Q(a||b) (рисунок 4.5). Для этого через проекцию грани B1C1 проведем вспомогательную секущую плоскость Θ. Эта плоскость пересечет заданную плоскость Q(a||b) по прямой, проходящей через точки 11, 21. Построим проекцию линии сечения двух плоскостей во фронтальной плоскости проекций (12, 22) и найдем точки пересечения этого отрезка с ребрами В и С – L и M. Аналогично строим линию пересечения грани AD с плоскостью Q – отрезок KN. Во фронтальной плоскости проекций соединяем проекции отрезков многоугольника K2 L2 M2 N2 с учетом видимости граней
– проекция отрезка видна, если грань видна в данной проекции, не видна– если проекция грани не видна. Кроме того, необходимо установить и взаимную видимость ребер призмы и секущей плоскости.
Рисунок 4.5 – Пересечение проецирующей призмы плоскостью общего положения
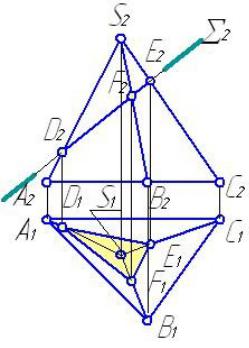
Рассмотрим построение сечения пирамиды общего положения плоскостью общего положения (рисунок 4.6).
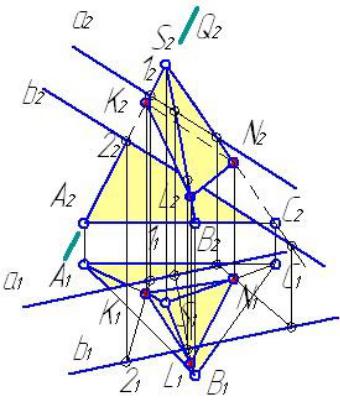
Рисунок 4.6 – Пересечение пирамиды плоскостью общего положения
Для построения линии пересечения будем определять вершины сечения как результат пересечения каждого ребра пирамиды с плоскостью общего положения ∑(a||b). Для нахождения точки пересечения ребра SA с плоскостью ∑(a||b) необходимо заключить ребро в секущую плоскость Q и найти линию пересечения двух плоскостей Q и ∑ - отрезок 1222;1121. Вершина К строится как результат пересечений соответствующих проекций проекций ребра SA и отрезка 1,2. Вершины L и N находят по тому же алгоритму, как результаты пересечений ребер SB и SC с плоскостью ∑(a||b).
Задачи на определение точек пересечения многогранника с прямой линией решают на основе метода вспомогательных секущих плоскостей. При этом одну из проекций заданной прямой заключают в проецирующую секущую плоскость. Находят линию пересечения вспомогательной
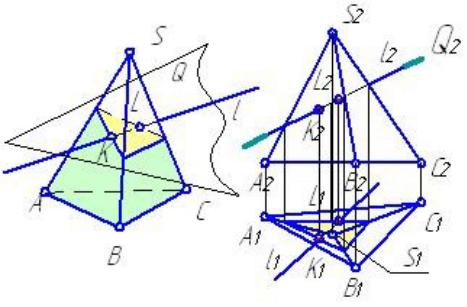
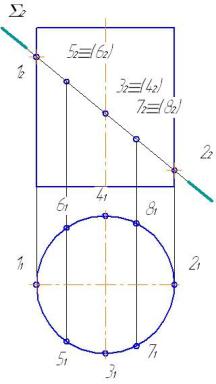
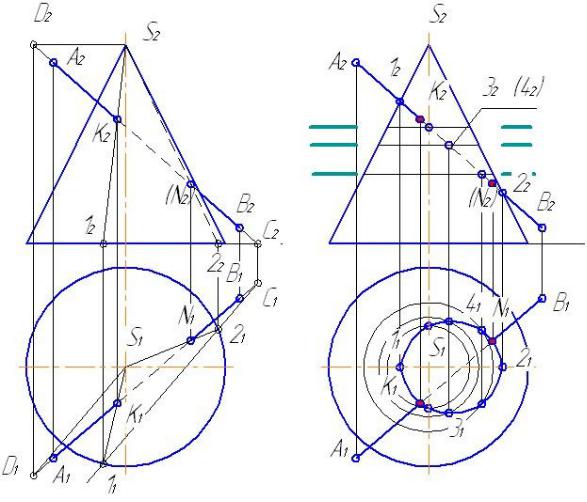
секущей плоскости с многогранником. Проекции точек пересечения прямой линии с многогранником находят как результат пересечения построенной линии сечения и другой проекции заданной прямой и последующего определения их положения в обеих плоскостях проекций. Найдем точки пересечения пирамиды с прямой общего положения (рисунок 4.7).
Рисунок 4.7 – Пересечение прямой линии с пирамидой
Заключим, например, фронтальную проекцию заданной прямой l2 во фронтально проецирующую плоскость Q2 и построим линию сечения пирамиды этой плоскостью. Точки пересечения пирамиды с прямой l построим как результат пересечения треугольника сечения сначала с горизонтальной проекцией прямой l1 – K1 и L1, а затем получим их фронтальные проекции (K2, L2).
Определим взаимную видимость прямой l (l1, l2) с пирамидой SABC. Задачи по определению точек пересечения многогранников с прямыми упрощаются, если один из элементов находится в частном положении.
Например, при определении точек пересечения прямой общего положения с проецирующей призмой, задача сводится к определению точек пересечения прямой с вырожденными проекциями граней призмы (рисунок 4.8).
Рисунок 4.8 – Пересечение прямой линии с прямой призмой
При нахождении точек пересечения пирамиды с проецирующей прямой, горизонтальные проекции точек пересечения (К1, N1) определяются на вырожденной проекции прямой, а затем выстраиваются их фронтальные проекции (К2, N2) и устанавливается их взаимная видимость (рисунок 4.9).
Рисунок 4.9 – Пересечение пирамиды с проецирующей прямой
4.3 Построение разверток многогранников
Если придать поверхностям свойства гибкости и нерастяжимости, то некоторые из них можно совместить с плоскостью без образования складок и разрывов, т. е. получить развертку поверхности.
Разверткой многогранника называется плоская фигура, полученная от совмещения всех граней многогранника с одной плоскостью в определенном порядке.
Для построения развертки призмы или пирамиды необходимо определить натуральную величину их ребер и оснований, а затем выполнить построение развертки поверхностей (рисунки 4.10 и 4.11).
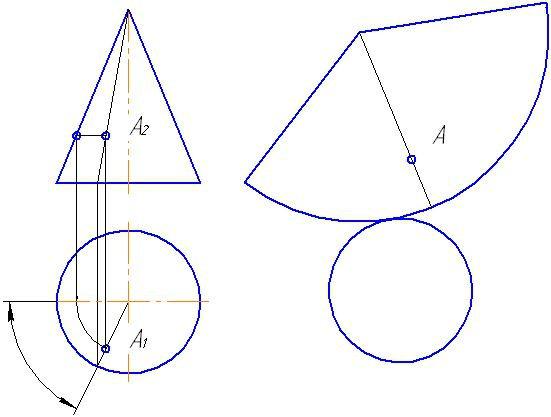
Построение развертки пирамиды сводится к многократному построению натуральной величины треугольников, ограничивающих ее поверхность.
Построим полную развертку трехгранной пирамиды (рисунок 4.10). Для этого определим натуральную величину каждого ребра методом прямоугольного треугольника. Ребро SC является фронтальной линией уровня, поэтому его проекция S2C2 является натуральной величиной. Основание пирамиды является горизонтальной плоскостью уровня, поэтому горизонтальная проекция треугольника АВС является натуральной величиной.
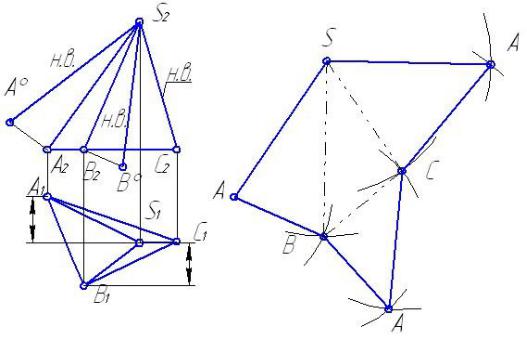
Рисунок 4.10 – Развертка пирамиды
Построение разверток наклонных призм сводится к построению натуральных величин граней многогранника. Эти построения могут быть выполнены следующими способами:
1.Способом нормального сечения, при котором определяется ширина каждой грани с помощью секущей плоскости, перпендикулярной к ребрам призмы;
2.Способом раскатки, который основан на последовательном совмещении всех граней призмы с плоскостью методом вращения вокруг линии уровня;
3.Способом триангуляции, основанном на разбиении ромбов диагоналями на треугольники и определении натуральных величин сторон треугольников.
Более подробно остановимся на рассмотрении сути способа нормального сечения. Зададим положение призмы таким образом, чтобы ее ребра находились, например, в положении фронталей (рисунок 4.11).
Рисунок 4.11 – Развертка призмы способом нормального сечения
Пересечем заданную призму вспомогательной плоскостью, перпендикулярной к ребрам призмы, т.е. определим ширину каждой грани призмы. Определим натуральную величину данного нормального сечения и построим развертку поверхности призмы. Построение развертки начинается с построения горизонтальной линии, на которой отложим отрезки, определяющие ширину каждой грани по его нормальному сечению.
Через точки, определяющие длины отрезков, перпендикулярно к ним проводим линии, на которых откладываем длины отрезков ребер, заключенных между линией сечения и основаниями призмы.
Развертка боковой поверхности призмы получается после соединения концов построенных отрезков прямыми линиями. Для построения полной развертки призмы необходимо достроить натуральные величины оснований призмы.
4.4 Взаимное пересечение многогранников
Результатом пересечения двух многогранников является пространственная ломаная замкнутая линия, идущая по боковой поверхности обоих многогранников.
Ее звенья определяют как результат пересечения граней одного многогранника с гранями другого, а вершины – как точки пересечения ребер каждого многогранника с гранями другого. Таким образом, задачу о построении линии взаимного пересечения двух многогранников можно свести к решению задачи о пересечении двух плоскостей, либо на пересечение прямой с плоскостью.
Линия пересечения многогранников может распадаться на две и более ветвей, которые могут быть как замкнутыми пространственными ломаными линиями, так и плоскими многоугольниками. Линия пересечения может находиться в пределах общей части проекций обеих пересекающихся поверхностей.
Построим линию пересечения призмы KLMN с пирамидой SABC.
Для построения линии пересечения сначала найдем точки пересечения, например, ребер призмы с гранями пирамиды (рисунок 4.12). Из чертежа видно, что ребра M, N, L находятся вне области наложения двух многогранников, следовательно, они не пересекаются с пирамидой. Ребро К находится в области наложения проекций двух граней пирамиды CSA и CSB (определяем по горизонтальным проекциям граней C1S1A1 и C1S1B1 и ребра К1), поэтому определим точки пересечения ребра К с этими гранями.
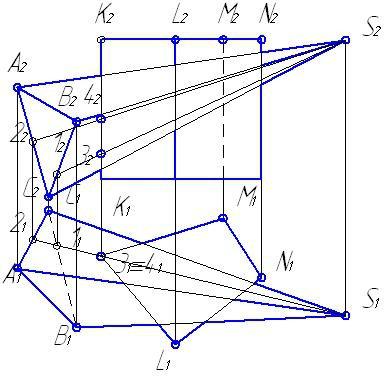
Рисунок 4.12 – Нахождение точек пересечения ребер призмы с гранями пирамиды
Для построения воспользуемся вспомогательными прямыми (S111, S121), которые проведем в гранях CSB и CSA через проекции точек пересечения ребра К с гранями – точки 3 и 4 (сначала определяем их горизонтальные проекции 31 и 41). Построим фронтальные проекции точек 3 и 4 в пересечении проекций ребра К2 с проекциями вспомогательных прямых S212, S222.
Находим точки пересечения ребер пирамиды с гранями призмы. Построение этих точек начнем с горизонтальной плоскости проекций, поскольку призма занимает горизонтально проецирующее положение. Проекция ребра S1А1 пересекает две грани призмы K1L1 и L1N1 в точках 51 и 61. Спроецируем эти точки во фронтальную плоскость проекций на проекцию ребра S2B2 и построим проекции 52 и 62.
Аналогично рассуждая, построим проекции точек пересечения ребер SA и SC с гранями призмы KL, KN и KM (7,8, 9, 10) (рисунок 4.13) .
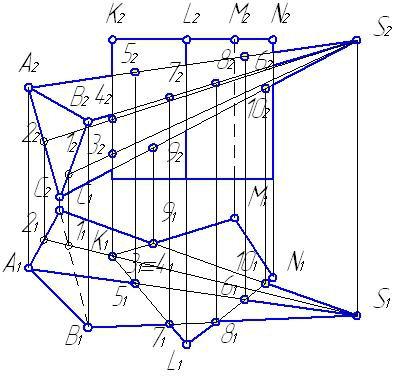
Рисунок 4.13 - Нахождение точек пересечения ребер пирамиды с гранями призмы
Последовательно соединим проекции точек пересечения отрезками прямых, принадлежащих одновременно грани призмы и пирамиды. Например, последовательно соединяются проекции точек 7- 5 - 4 - 9 - 3 – 7, соединяющих отрезки линии пересечения двух многогранников в области входа и точки 8, 6 и 10 в области выхода двух многогранников.
Последним этапом построения является определение видимости участков построенной линии пересечения. Проекция отрезка линии пересечения считается видимой, если отрезок находится в видимых проекциях грани пирамиды и грани призмы. Если хотя бы одна из проекций граней невидна, то проекция рассматриваемого участка линии пересечения не видна. Выполним соединение участков линии пересечения и обводку чертежа с учетом видимости граней (рисунок 4.14).
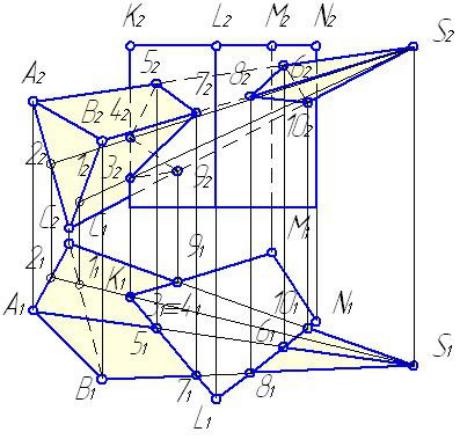
Рисунок 4.14 – Взаимное пересечение многогранников
Вопросы для самоконтроля по теме 4:
1.Что называется многогранником?
2.Чем задается поверхность многогранника на комплексном чертеже?
3.Какие способы используют при построении сечения многогранника плоскостью?
4.Как строятся точки входа и выхода при пересечении многогранника с прямой линией?
5.В чем состоит суть способа нормального сечения при построении развертки призмы?
6.Какой способ используется при построении развертки пирамиды?
5 КРИВЫЕ ЛИНИИ И ПОВЕРХНОСТИ
5.1 Кривые линии
Кривые линии применяются при конструировании различных поверхностей, в теории машин и механизмов, в моделировании и разметочном деле, при построении диаграмм состояния многокомпонентных систем.
Кривой линией называется совокупность последовательных положений точки, перемещающейся в пространстве.
Кривые линии, все точки которых принадлежат одной плоскости, называются плоскими, например, прямая линия, окружность, эллипс, парабола, гипербола, синусоида, графики функций одной переменной, графики уравнений с двумя неизвестными, остальные кривые линии – пространственными, например, винтовые линии.
Каждая кривая включает в себя геометрические элементы, которые составляют ее определитель, т.е. совокупность независимых условий, однозначно определяющих эту кривую.
Различают следующие способы задания кривых:
1.Аналитический – кривая задается математическим уравнением;
2.Графический – кривая задается лишь графически;
3.Табличный – кривая задается координатами последовательного ряда ее точек.
Любая кривая линия может быть получена движением точки в пространстве, как результат пересечения кривых поверхностей плоскостью и как результат взаимного пересечения поверхностей, хотя бы одна из которых – кривая.
Точки плоской кривой линии делятся на обыкновенные (точка касания A) и особые (точка перегиба B – в точке перегиба кривизна меняет знак – с
одной стороны от этой точки кривая выпуклая, с другой – вогнутая; точки возврата C – точка возврата 1-го рода (точка F циклоиды относится к точкам возврата 1-го рода), D - точка возврата 2-го рода; точка E двойная точка строфоиды, в этой точке у кривой – две различные касательные m1 и m2) (рисунок 5.1).
Рисунок 5.1 – Обыкновенные и особые точки кривой
Закономерные кривые линии разделяют на алгебраические (окружность, парабола) и трансцендентные (синусоида).
При изучении плоской кривой линии часто возникает необходимость определения ее порядка. Порядок плоской кривой линии определяется наибольшим числом точек ее пересечения прямой линией, либо степенью ее уравнения. Линия первого порядка – прямая. Кривые линии второго порядка – эллипс (частный ее вид – окружность), парабола, гипербола.
Окружность – замкнутая кривая, все точки которой находятся на одинаковом расстоянии от некоторой точки О, лежащей в этой плоскости, называемой центром. Уравнение окружности: x2 +y2=R2.
Эллипс – это множество всех точек плоскости, сумма расстояний до двух заданных точек F1 и F2, называемых фокусами, есть величина постоянная (2a). Уравнение эллипса: x2/a2 +y2/b2=1 .
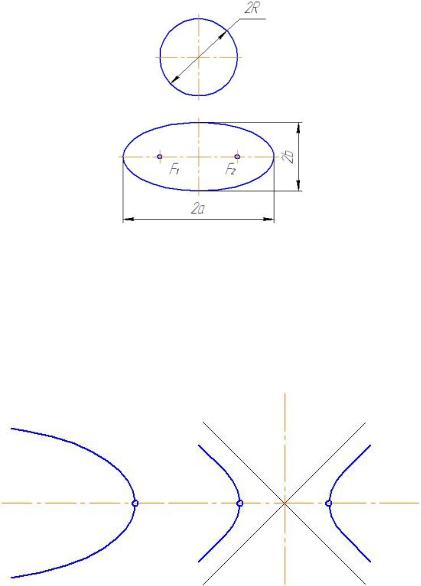
Рисунок 5.2 – Линии второго порядка: окружность и эллипс
Парабола определяется уравнением y2 = 2px. Парабола имеет одну несобственную точку, обладает одной осью симметрии.
Гипербола определяется уравнением x2/a2 – y2/b2 =1. Гипербола обладает центром и двумя осями симметрии, имеет две несобственными точками.
Рисунок 5.3 – Линии второго порядка: парабола и гипербола
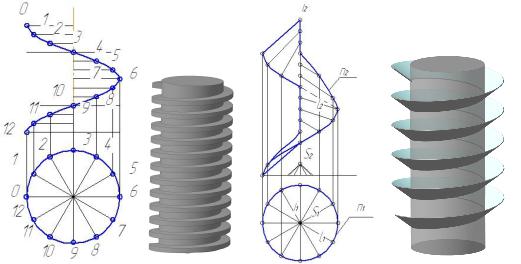
Из пространственных кривых линий наибольший практический интерес представляют цилиндрическая и коническая винтовые линии.
Цилиндрическая винтовая линия – это линия, описываемая точкой при равномерном движении по прямой, при равномерном вращении ее вращении вокруг параллельной ей оси.

Рисунок 5.4 – Винтовая линия
Высота, на которую поднимется точка А за один полный оборот называется шагом винтовой линии.
Фронтальная проекция цилиндрической винтовой линии – синусоида, горизонтальная – окружность.
5.2 Образование кривых поверхностей
Кривой поверхностью называется совокупность последовательных положений некоторой линии, движущейся в пространстве по определенному закону.
Поверхности можно задавать на чертеже следующими способами:
1. Кинематическим – поверхность рассматривается как непрерывное множество положений перемещающейся в пространстве линии по определенному закону.
Движущуюся линию называют образующей поверхности, а линия,
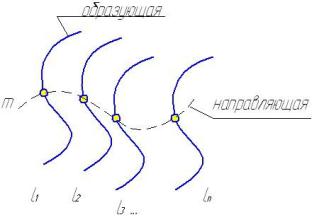
по которой перемещается образующая, называется направляющей (рисунок 5.5).
Рисунок 5.5 – Кинематический способ задания поверхностей
2. Каркасом – при невозможности описать математически поверхность задают достаточно плотной сетью линий, принадлежащих этим поверхностям. Каркас поверхности может состоять из пространственных кривых или семейств плоских сечений (рисунок 5.6).
Рисунок 5.6 – Задание поверхности каркасом
3.Аналитическим – поверхность рассматривается как непрерывное двумерное множество точек. Координаты точек этого множества удовлетворяют некоторому уравнению F(x,y,z) = 0.
4.Определителем – совокупностью условий, необходимых и достаточных для однозначного задания поверхности. Определитель поверхности
состоит из геометрической и алгоритмической частей D = [G] Λ [A] . Например, поверхность цилиндра вращения можно задать вращением прямой a вокруг неподвижной оси i с помощью определителя: D = [a, i] Λ [A]. Геометрическая часть определителя представлена фронтальными проекциями оси и образующей. В алгоритмической части следует записать «поверхность вращения» (рисунок 5.7).
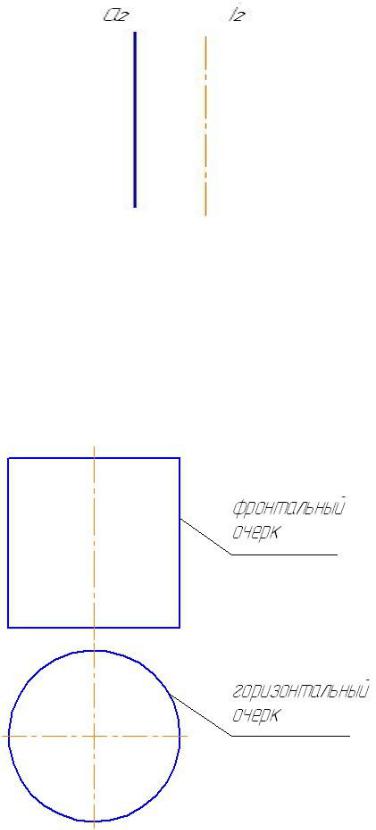
Рисунок 5.7 – Задание поверхности определителем
5. Очерком – границей видимой части поверхности на соответствующей плоскости проекций. Этот способ является наиболее наглядным при решении задач начертательной геометрии. Например, поверхность прямого кругового цилиндра можно представить проекциями его горизонтального и фронтального очерков (рисунок 5.8).
Рисунок 5.8 – Задание поверхности очерком
Большое многообразие поверхностей, различные способы их формирования, сложности геометрических характеристик создают трудности в попытках классификации поверхностей.
Все кривые поверхности в зависимости от вида образующих подразделяются на поверхности линейчатые, у которых образующая – прямая линия, и нелинейчатые, у которых образующая – кривая.
Отдельные линейчатые поверхности, если им придать физические свойства гибкости и нерастяжимости, могут быть развернуты до совмещения с плоскостью без складок и разрывов. Такие поверхности называются развертываемыми. Те из линейчатых поверхностей, которые не удовлетворяют указанным требованиям, а также нелинейчатые поверхности называются неразвертываемыми.
5.3 Поверхности: вращения, линейчатые, винтовые, циклические
5.3.1 Поверхности вращения
Поверхностью вращения называется поверхность, описываемая кривой (или прямой) образующей при ее вращении вокруг неподвижной оси.
Каждая точка образующей описывает при своем вращении окружность с центром на оси. Эти окружности называются параллелями. Параллель наибольшего радиуса называется экватором, наименьшего – горлом (рисунок 5.9).
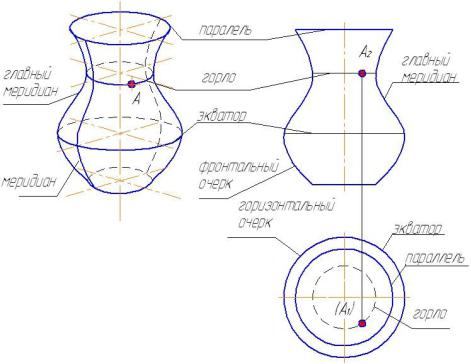
Кривые, получающиеся в сечении тела вращения плоскостями, проходящими через ось, называются меридианами. Меридиан, параллельный фронтальной плоскости проекций, называется главным.
Рисунок 5.9 – Поверхность вращения
К поверхностям, образованным вращением прямой линии, относятся следующие поверхности:
1.Цилиндр вращения – образуется вращением прямой линии вокруг параллельной ей оси i.
2.Конус вращения – образуется вращением прямой линии вокруг пересекающейся с ней осью i.
3.Однополостный гиперболоид вращения – получают вращением прямой линии вокруг скрещивающейся с ней осью i.
Гиперболоид вращения может быть получен также вращением гиперболы вокруг ее мнимой оси.
Названные поверхности являются также и поверхностями линейчатыми (рисунок 5.10).
Рисунок 5.10 – Поверхности вращения: цилиндр, конус, гиперболоид
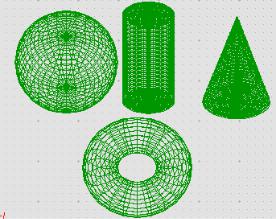
К поверхностям вращения, образованным вращением окружности, относятся:
1.Сфера – поверхность, образованная вращением окружности вокруг своего диаметра;
2.Тор – поверхность, образованная вращением окружности вокруг оси, лежащей в плоскости этой окружности, но не проходящей через ее центр;
3.Кольцо - поверхность, образованная вращением окружности вокруг оси, лежащей вне окружности.
Тор является поверхностью четвертого порядка.
Любая поверхность считается заданной, если на ее поверхности можно определить положение любой точки. Для построения точек на поверх-
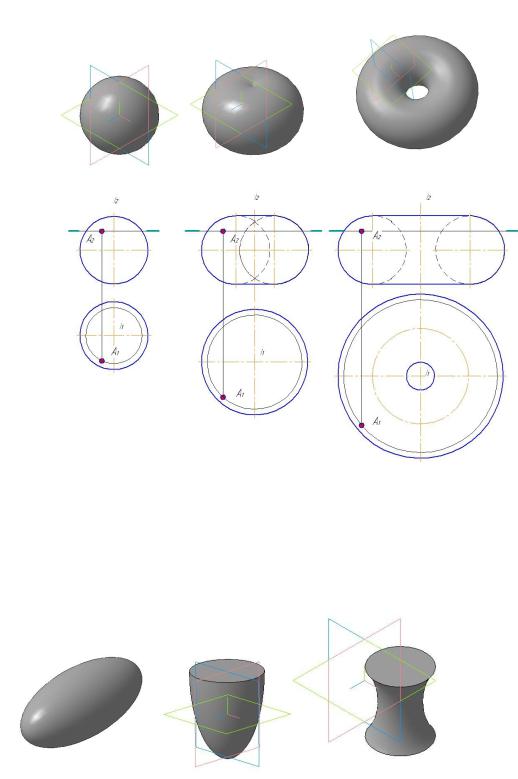
ности сферы или тора необходимо использовать параллели и меридианы этих поверхностей (рисунок 5.11).
Рисунок 5.11 – Поверхности вращения: сфера, тор, кольцо
Поверхности вращения, образованные вращением эллипса, параболы и гиперболы называются соответственно: эллипсоид вращения, параболоид вращения, однополостный гиперболоид вращения (рисунок 5.12).
Рисунок 5.12 – Поверхности вращения: эллипсоид, параболоид, гиперболоид
5.3.2 Линейчатые поверхности
Поверхность, образованная движением прямой линии, называется линейчатой.
Линейчатая поверхность, образованная движением прямолинейной образующей, постоянно проходящей через некоторую точку S и во всех случаях пересекающей некоторую направляющую кривую, называется конической.
Линейчатая поверхность, образованная движением образующей, параллельной некоторому направлению и пересекающей направляющую, называется цилиндрической.
К линейчатым поверхностям относится и поверхность с ребром возврата - образуется перемещением прямой линии по некоторой пространственной кривой, причем образующая прямая линия остается в каждой точке касательной к криволинейной направляющей (рисунок 5.13).
Рисунок 5.13 – Линейчатые поверхности: коническая, цилиндрическая, поверхность с ребром возврата
5.3.3 Винтовые поверхности
Винтовая поверхность образуется винтовым перемещением некоторой производящей линии (рисунок 5.14).
Винтовые поверхности с производящими прямыми линиями называют геликоидами.
Геликоид называют прямым, если производящая прямая линия составляет с осью z поверхности прямой угол. В других случаях геликоид называют наклонным или косым.
Рисунок 5.14 – Прямой и косой геликоиды
5.3.4 Циклические поверхности
Циклической называется поверхность, описываемая окружностью постоянного или переменного радиуса при ее произвольном движении.
Примером циклической поверхности может быть любая поверхность вращения. Кроме того к ним можно отнести каналовые и трубчатые поверхности.
Каналовая поверхность образуется движением окружности переменного радиуса вдоль кривой направляющей.
Трубчатая поверхность образуется движением окружности постоянного радиуса вдоль кривой направляющей (рисунок 5.15).
Рисунок 5.15 –Циклические поверхности: каналовая и трубчатая
5.4 Обобщенные позиционные задачи
5.4.1 Пересечение кривых поверхностей плоскостью
При пересечении кривой поверхности плоскостью в общем случае получается плоская кривая (эллипс, окружность). При пересечении линейчатых поверхностей плоскостью могут получаться, в частном случае, и прямые линии, если секущая плоскость направлена вдоль образующих или проходит через одну точку (цилиндра или конуса).
Для построения линии пересечения кривой поверхности плоскостью используют способ вспомогательных секущих плоскостей. Вспомогательную плоскость выбирают так, чтобы она пересекала заданную плоскость по прямой линии, а поверхность по графически простой линии (окружности или прямой линии). Точки пересечения этих линий и будут искомыми точками, принадлежащими поверхности и секущей плоскости.
Построение проекций линии сечения поверхности плоскостью значительно упрощается, если секущая плоскость занимает проецирующее поло-
жение. В этом случае одна из проекций линии сечения уже имеется на чертеже: она совпадает с проекцией плоскости. Задача сводится лишь к построению другой проекции этой линии.
Рассмотрим построение линии сечения цилиндра проецирующей плоскостью (рисунок 5. 16).
Рисунок 5.16 – Пересечение цилиндра проецирующей плоскостью
Цилиндр пересекается плоскостью Σ по эллипсу. Поскольку цилиндр занимает горизонтально проецирующее положение, то на горизонтальную плоскость проекций эллипс вырождается в окружность, совпадающую с горизонтальным очерком цилиндра. Поскольку секущая плоскость ∑ занимает фронтально проецирующее положение, то фронтальная проекция эллипса вырождается в отрезок прямой 1222.
Рассмотрим построение линии сечения прямого кругового цилиндра плоскостью общего положения (рисунок 5.17).
Алгоритм построения:
1.Провести анализ условия задачи. Поскольку цилиндр занимает горизонтально проецирующее положение, то горизонтальная проекция эллипса сечения вырождается в окружность, а фронтальная – проецируется в эллипс.
2.Определить положение опорных точек.
Точки видимости А и В - это точки разделяющие фронтальную проекцию эллипса сечения на видимую и невидимую части. Проекции А2 и В2 определяем с помощью вспомогательной секущей плоскости Q (фронтальной плоскости уровня), проведенной через проекции А1 и В1.
Ближняя и дальняя точки С и D определяются с помощью секущих плоскостей фронтального уровня, проведенных через проекции С1 и D1 и пересекающих цилиндр по ближней и дальней образующим, а заданную плоскость – по соответствующим фронталям. Проекции точек С2 и D2 находим в пересечении соответствующих проекций линий.
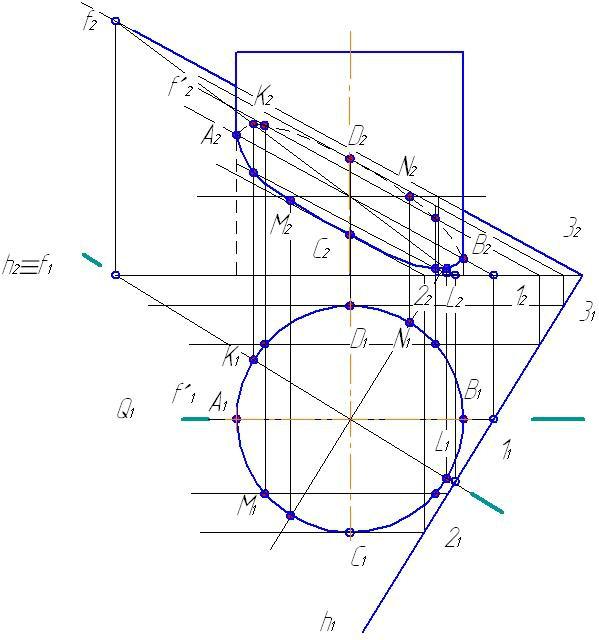
Рисунок 5.17 – Пересечение цилиндра плоскостью общего положения
Высшая и низшая точки сечения К и L находятся на линии ската, проведенной через ось цилиндра перпендикулярно к горизонтали заданной плоскости. Отрезок KL определяет положение большой оси эллипса.
Малая ось эллипса MN расположена перпендикулярно большой оси, ей перпендикулярна и проходит через ось цилиндра.
3.Определить положение случайных точек. Проводят вспомогательные секущие плоскости фронтального уровня и определяют положение проекций случайных точек на горизонтальной и фронтальной плоскостях проекций.
4.Установить видимость эллипса во фронтальной плоскости проекций. Установить в проекциях взаимную видимость цилиндра и секущей плоскости.
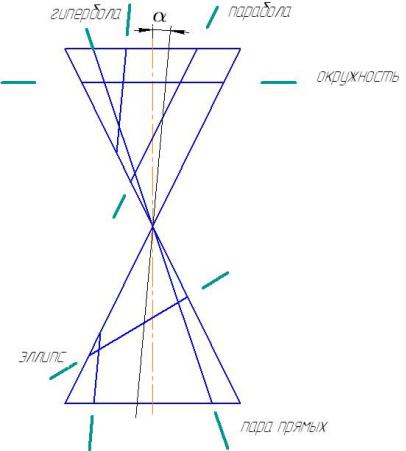
Врезультате пересечения прямого кругового конуса плоскостями могут быть получены линии, характер которых можно предвидеть в зависимости от расположения конуса и секущей плоскости. Этими линиями могут быть: окружность, эллипс, парабола, гипербола, а в случае, если секущая плоскость проходит через вершину конуса – пара прямых (рисунок 5.18).
Построим линию сечения прямого кругового конуса проецирующей плоскостью (рисунок 5.19).
Алгоритм построения:
1.Провести анализ условия задачи.
Секущая плоскость находится во фронтально проецирующем положении, следовательно фронтальная проекция эллипса сечения вырождается во фронтальной проекции в отрезок прямой АВ.
2.Определить положение опорных точек: верхняя и нижняя точки сечения А и В определяют положение большой оси эллипса. Положение точек ближней и дальней (C и D) определяют на малой оси эллипса, которая перпендикулярна большой оси и находится на середине отрезка АВ.
3.Определить положение случайных точек: K,L и M,N. Для их построения используются вспомогательные секущие плоскости уровня, кото-
рые пересекают поверхность конуса по окружностям соответствующих радиусов, а плоскость – по фронтально проецирующим прямым.
Рисунок 5. 18 – Конические сечения (коники)
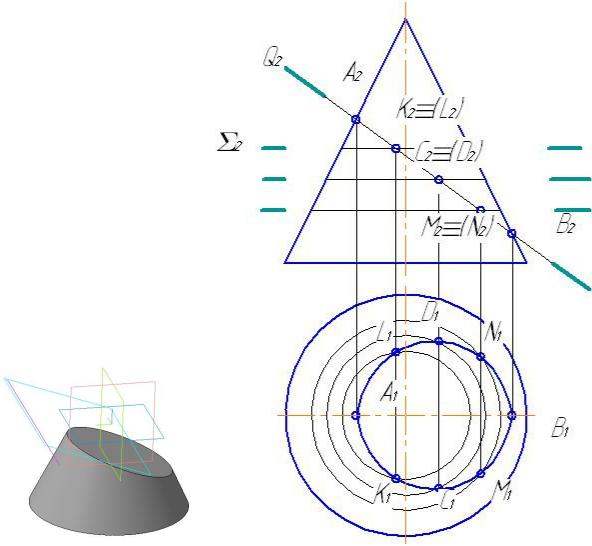
Рисунок 5.19 – Пересечение конуса фронтально проецирующей плоскостью
5.4.2 Пересечение кривой поверхности с прямой линией
Результатом пересечения кривой поверхности с прямой линией является пара точек.
Пару точек пересечения прямой линии с кривой поверхностью условно называют точками входа и выхода. Для построения этих точек используют метод вспомогательных секущих плоскостей.
Алгоритм построения:
1.Любую проекцию заданной прямой заключают в секущую плоскость. (Обычно в качестве вспомогательной плоскости выбирают проецирующие плоскости.)
2.Строят проекции линии сечения поверхности плоскостью.
3.Определяют точки пересечения полученной линии с заданной пря-
мой.
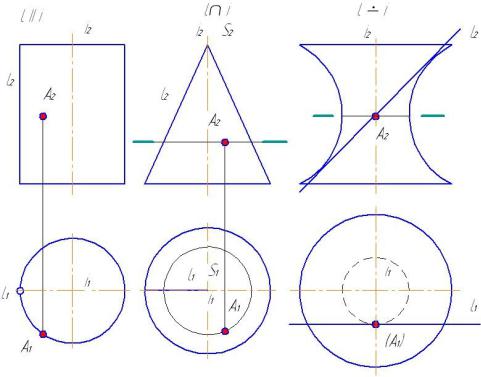
4.Определяют взаимную видимость прямой линии и поверхности. Рассмотрим различные случаи построения точек пересечения кривых
поверхностей с прямой линией.
Решение задач упрощается, если один из элементов (прямая или поверхность) находятся в частном положении (рисунок 5.20). В этом случае в одной из проекций определяется положение проекций точек пересечения прямой линии с кривой поверхностью.
Заключив фронтальную проекцию заданной прямой в проецирующую секущую плоскость в сечении цилиндра получим эллипс, который спроецируется на горизонтальную плоскость проекций в виде окружности, совпадающей с горизонтальным очерком поверхности цилиндра. Точки пересечения проецирующего цилиндра с прямой определяются на горизонтальной плоскости проекций в пересечении горизонтального очерка цилиндра с проекцией прямой линии. Устанавливается взаимная видимость прямой линии и цилиндра.
При нахождении точек пересечения прямой частного положения с поверхностью конуса общего положения можно использовать построение образующих, принадлежащих поверхности конуса. Построить точки пересечения M и N и установить взаимную видимость прямой и конуса.
Рисунок 5.20 – Частные случаи пересечения поверхностей с прямыми линиями
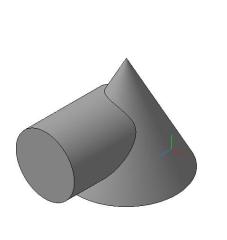
Рассмотрим общий случай пересечения кривой поверхности с прямой линией общего положения на примере пересечения конуса с прямой линией (рисунок 5.21). Данную задачу решим двумя способами.
В первом случае фронтальную проекцию прямой АВ заключаем в плоскость, проходящую через вершину конуса (плоскость ABS). Эта плоскость пересечет конус по прямым S1 и S2. Для построения этих прямых найдена линия DC пересечения плоскости ABS с плоскостью основания конуса и точки 1 и 2 ее пересечения с окружностью основания конуса. Точки пересечения K и N прямой АВ с поверхностью конуса найдены как результат пересечения прямой CD с прямыми S1 и S2. Определяем взаимную видимость прямой линии и конуса.
Во втором случае прямая АВ заключена во фронтально проецирующую плоскость, которая пересекает конус по эллипсу. Точки пересечения K и N находят как результат пересечения построенного эллипса с прямой
АВ и определяют взаимную видимость прямой линии и секущей плоскости.
Первый способ решения задачи наиболее рационален.
Рисунок 5.21 – Пересечение конуса с прямой общего положения
Для решения задачи по определению точек пересечения сферы с прямой общего положения (рисунок 5.22) рациональнее использовать способ перемены плоскостей проекций. При этом заключают, например, горизонтальную проекцию заданной прямой АВ в горизонтально проецирующую плоскость. В сечении сферы этой плоскостью получают окружность, которая на плоскость П4 спроецируется без искажения в виде окружности,
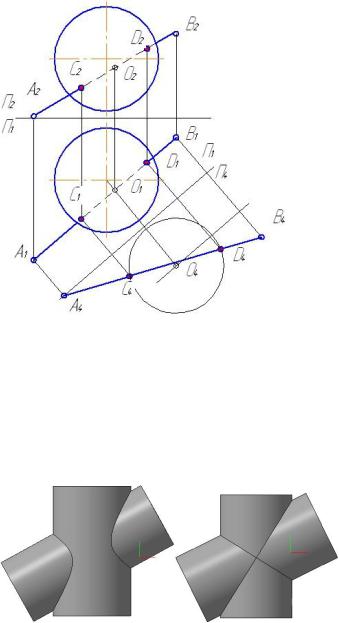
а отрезок прямой А4В4 – в свою натуральную величину. Точки пересечения C и D определяют в пересечении окружности и прямой в плоскости П4, а затем определяют их проекции на плоскости П1 и П2. Устанавливают видимость проекций прямой и сферы в соответствии с видимостью построенной линии сечения.
Рисунок 5.22 – Пересечение сферы с прямой общего положения
5.4.3 Способы построения линий пересечения кривых поверхностей
Две кривые поверхности пересекаются в общем случае по пространственной кривой линии (рисунок 5.23).
Рисунок 5.23– Взаимное пересечение кривых поверхностей
Линию пересечения двух кривых поверхностей строят по ее отдельным точкам. Эти точки определяют с помощью вспомогательных поверх- ностей-посредников. Пересекая заданные поверхности некоторой вспомогательной поверхностью, получают линии сечения, в пересечении которых и находят точки, принадлежащие одновременно обеим поверхностям и, следовательно, искомой линии сечения.
В качестве поверхностей-посредников чаще всего выбирают плоскости или сферы. Применение этих поверхностей определяется типом и расположением задаваемых поверхностей.
5.4.3.1 Способ вспомогательных секущих плоскостей
Способ вспомогательных секущих плоскостей применяют в том случае, когда обе поверхности можно пересечь по графически простым линиям (окружностям или прямым) некоторой совокупностью проецирующих плоскостей или плоскостей уровня (рисунок 5.24).
Рисунок 5.24 – Пересечение конуса и цилиндра

Рассмотрим применение способа вспомогательных секущих плоскостей уровня на примере задачи построения линии пересечения цилиндра и конуса (рисунок 5.25).
Рисунок 5.25 – Метод секущих плоскостей: пересечение цилиндра и конуса
Построение начнем с определения опорных точек (верхняя, нижняя, правая и левая точки сечения и точки видимости). Поскольку поверхность кругового цилиндра находится во фронтально проецирующем положении, то эти точки находятся на фронтальном очерке поверхности -окружности, в которую проецируется цилиндр.
Сама линия сечения во фронтальной плоскости проекций совпадет с фронтальным очерком цилиндра и определяется областью наложения проекций двух поверхностей.
Построение проекций верхней и нижней точек сечения начнем с определения их фронтальных проекций 12 и 22. Построим их на гори-
зонтальной плоскости проекций на проекции главного меридиана и найдем горизонтальные проекции точек 11 и 21.
Для построения горизонтальных проекций самой правой и самой левой точек сечения воспользуемся способом секущих плоскостей уровня. Положение вспомогательной плоскости выберем таким образом, чтобы она одновременно пересекала обе поверхности по графически простым линиям - по окружностям или прямым линиям. Вспомогательную секущую плоскость – горизонтальную плоскость уровня - проведем через фронтальные проекции точек 3 и 4. В этом случае поверхность кругового цилиндра будет пересекаться ею по прямым линиям, а поверхность кругового конуса – по окружности. Горизонтальные проекции точек 31 и 41 будут получены в пересечении горизонтальных проекций линий сечения.
Точки 3 и 4 являются одновременно и точками видимости для горизонтальной проекции линии сечения, т.е. разграничивают эту проекцию на видимую и невидимую части.
Все остальные точки, принадлежащие линии сечения, будут являться вспомогательными и их выбор носит случайный характер. Количество случайных точек определяется точностью построения: чем больше их, тем точнее выполнено решение.
Остановимся подробнее на построении пары случайных точек 5 и 6. Для этого во фронтальной плоскости проекций выберем пару конкурирующих точек и воспользуемся вспомогательной секущей плоскостью горизонтального уровня для определения их горизонтальных проекций.
Соединив построенные проекции точек плавной кривой линией, получим горизонтальную проекцию линии сечения двух поверхностей. При этом в горизонтальной плоскости проекций будем учитывать положение точек видимости. Участок линии сечения, находящийся выше точек 3 и 4,
будет видимым, а ниже них – невидимым. Фронтальная проекция этой линии совпадает с фронтальным очерком цилиндрической поверхности, и, являясь симметричной, будет видимой.
Таким образом, для построения линии пересечения поверхностей необходимо:
1.Определить какие поверхности пересекаются и есть ли в условии задачи проекции линии пересечения.
2.Определить положение опорных точек.
3.Выбрать положение вспомогательных секущих плоскостей.
4.Найти положение остальных опорных и случайных точек с помощью выбранных секущих плоскостей.
5.Начертить проекции искомой линии сечения.
6.Определить видимость.
Для построения лини пересечения поверхностей, не имеющих общей плоскости симметрии, используют метод секущих плоскостей (рисунок 5.26). Для определения положения точек 1 и 2, через ось симметрии конуса проведем фронтальную плоскость уровня Σ, которая пересекает конус – по главному меридиану, а сферу – по окружности. Определяют фронтальные проекции точек 12 и 22, а затем – проекции 11, 21.
Положение высшей и низшей точек (3 и 4) определяют с помощью секущей плоскости Q, проходящей через центры конуса и сферы и являющейся плоскостью симметрии двух поверхностей. Для определения проекций точек 32 , 42 и 31, 41 был использован способ вращения полученных сечений (меридианов обеих поверхностей), вокруг оси, проходящей через ось симметрии конуса.
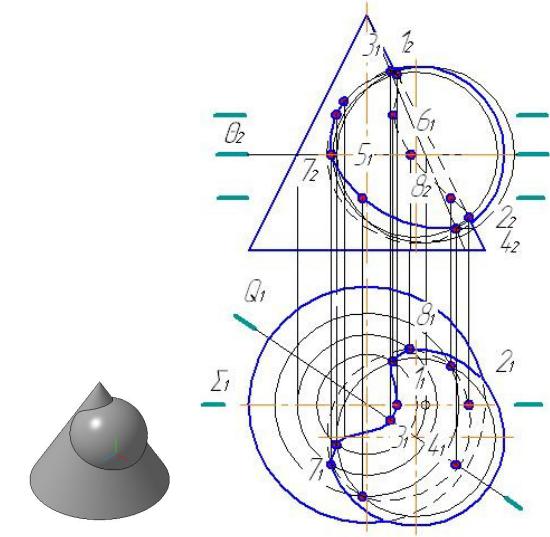
Рисунок 5.26 – Пересечение конуса и сферы – способ секущих плоскостей
Точки видимости для горизонтальной плоскости проекций (5,6) определяют с помощью плоскости Θ, проведенной через экватор сферы.
Положение случайных точек определяем с помощью секущих плоскостей горизонтального уровня.
Точки видимости для фронтальной плоскости проекций будут находиться на главном меридиане сферы. Если провести секущую плоскость, через главный меридиан сферы, то в сечении сферы будет окружность, а в сечении конуса – гипербола. Определим приблизительное положение этих

точек после построения общей линии сечения поверхностей.
Соединяем проекции построенных точек с учетом видимости в соответствующих плоскостях проекций.
5.4.3.2 Способ вспомогательных секущих сфер
Использование способа вспомогательных секущих сфер основано на свойстве, присущем поверхностям вращения. Оно состоит в том, что две
любые соосные поверхности вращения пересекаются по окружностям, проходящим через точки пересечения меридианов поверхностей.
При этом плоскости окружностей сечения перпендикулярны оси вращения, а центры окружностей принадлежат этой оси. Поэтому, если оси поверхностей вращения параллельны плоскости проекций, то на эту плоскость окружности сечения проецируются в отрезки прямых, перпендикулярных проекциям осей поверхностей вращения, а на другую плоскость – в виде окружностей.
В качестве вспомогательной секущей поверхности вращения удобно использовать сферическую поверхность, центр которой должен принадлежать оси поверхности вращения (рисунок 5.27).
Рисунок 5.27 – Свойство секущих сфер
Взависимости от взаимного расположения поверхностей, различают два возможных варианта решения задач с использованием способа секущих сфер:
1.Оси обеих поверхностей параллельны плоскости проекций.
2.Пересекающиеся поверхности имеют общую плоскость сим-
метрии.
Впервом случае используется способ концентрических секущих сфер (рисунок 5.28), во втором – эксцентрических секущих сфер.
Рисунок 5.28 – Способ концентрических секущих сфер: пересечение конусов
Остановимся подробнее на использовании способа концентрических секущих сфер для решения задачи на построение линии пересечения двух конусов (рисунок 5.29).
Построение линии пересечения начинают с определения положения проекций опорных точек. Проекции точек 12, 22 и 32, 42 – самые верхние и нижние точки в области входа поверхностей конусов и в области их выхода. Их горизонтальные проекции11, 21, 31, 41 получают проецированием на ось симметрии в горизонтальной плоскости проекций.
Для получения остальных точек линии пересечения поверхностей используют способ концентрических секущих сфер. Центр секущих сфер выбирают во фронтальной плоскости проекций в пересечении осей симметрии поверхностей. Построение начинают с определения минимального радиуса секущей сферы – величины большего из двух перпендикуляров, опущенных из центра сфер на образующие поверхности конусов.

Рисунок 5.29 - Способ концентрических секущих сфер
Построим точки, принадлежащие линии пересечения поверхностей, как результат пересечения двух хорд (пространственных окружностей, по которым вспомогательная сфера пересекает конусы).
Построим случайные точки, принадлежащие линии пересечения – точки 5 и 6, с помощью секущей сферы, радиус которой выбирают из диапозона: больше минимального и меньше максимального (от центра до проекции точки 22).
Соединяем проекции линии сечения с учетом их видимости в соответствующих проекциях.
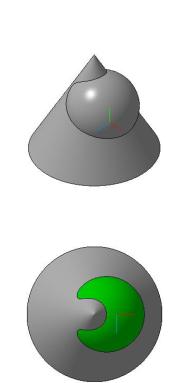
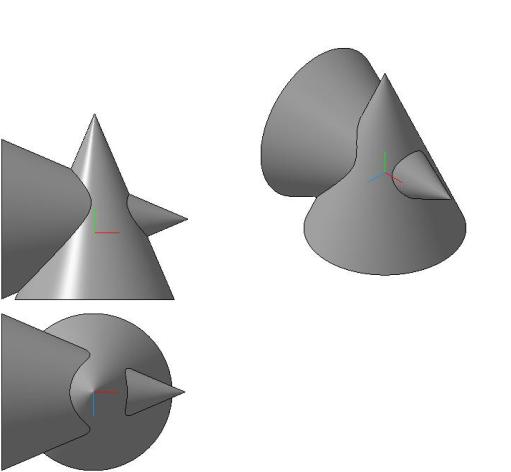
Рассмотрим использование метод эксцентрических секущих плоскостей для решения задачи на определение пересечения конуса и сферы, имеющих общую плоскость симметрии (рисунок 5.30).
Рисунок 5.30 – Соосные конус и сфера
Построение линии пересечения начинаем с определения положения верхней и нижней точек сечения (12, 22) в пересечении фронтальных очерков поверхностей и определим их горизонтальные проекции 11 и 21 (рисунок 5.31). Остальные точки определяем с помощью секущих сфер, проведенных из одного или разных центров, лежащих на оси симметрии конуса.

Рисунок 5.31 – Пересечение конуса и сферы – способ сфер
Пары точек 3,4 и 5,6 определяют сначала во фронтальной плоскости проекций в пересечении хорд от соответствующих сечений вспомогательной сферой заданных поверхностей. Затем выстраивают их горизонтальные проекции. Видимость линии пересечения определяют в горизонтальной плоскости проекций, используя секущую плоскость, проходящую через экватор сферы. Во фронтальной плоскости проекций линия сечения, являясь симметричной, проецируется в видимую плавную кривую.
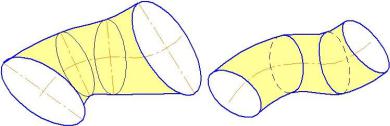
Метод эксцентрических секущих сфер используют при построении линии пересечения открытого тора и усеченного конуса (рисунок 5.32). Верхнюю и нижнюю точки сечения А и В находятся в плоскости главного меридиана обеих поверхностей и поэтому определяются их фронтальными проекциями в пересечении очерков поверхностей. Затем выстраиваются их горизонтальные проекции А1 и В1.

Рисунок 5.32 – Способ эксцентрических сфер: пересечение тора и конуса
Остальные точки строятся с помощью секущих сфер, пересекающих поверхность кольца по его меридиональным окружностям. Для нахождения центров секущих сфер проводят секущие плоскости, проходящие центр кольца. Через точку пересечения этой плоскости и оси тора проводят касательную до пересечения с осью конуса – эта точка и будет центром секущей сферы общей как для тора, так и для конуса. Проекции точки C2 и D2 определяют в пересечении хорд (пространственных окружностей) на поверхностях тора и конуса. Определяют положение образующих и строят проекции C1 и D1 на соответствующие проекции образующих тора.
Точки видимости для горизонтальной проекции линии сечения определяют на оси симметрии усеченного конуса во фронтальной плоскости проекций (проводят плоскость горизонтального уровня) и определяют горизонтальные проекции точек видимости (L1 и N1). Во фронтальной плоскости проекций линия проецируется в виде видимой кривой.
5.5 Касательные линии и плоскости к поверхности
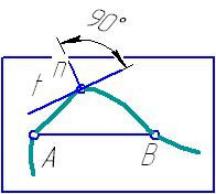
Прямая линия, лежащая в одной плоскости с кривой, может пересекаться с ней в двух и более точках. Такая прямая называется секущей. Если секущую перемещать так, чтобы длина дуги АВ между двумя точками пересечения приближалась к нулю, то в предельном положении секущая займет положение t и будет называться касательной (рисунок 5.33).
Касательная указывает направление движения по кривой в каждой точке касания.
Плоскость, касательная к поверхности, имеет общую с этой поверхностью точку, прямую или плоскую кривую линию. Плокость в одном месте может касаться поверхности, а в другом ее пересекать. Линия соприкасания может одновременно являться и линией пересечения поверхности плоскостью.
Рисунок 5.33 – Касательная к кривой
В общем случае плоскость, касательная к поверхности представляет собой множество прямых линий, касательных к любым кривым, принадле-
жащим поверхности и проходящим через заданную точку этой поверхности.
Для задания касательной плоскости к какой-либо поверхности достаточно через заданную на поверхности точку провести кривые, принадлежащие поверхности и построить к каждой из них касательную прямую, проходящую через одну точку. Эти прямые и определят касательную плоскость. Касательная к поверхности плоскость является предельным положением секущей плоскости.
Прямую линию, проходящую через точку касания и перпендикулярную к касательной плоскости, называют нормалью поверхности в данной точке. Нормаль поверхности в данной точке определяет направление плоскости, касательной к поверхности в этой точке (рисунок 5.34).
Не в каждой точке поверхности можно построить касательную плоскость. В некоторых точках касательная плоскость не может быть определена или не является единственной. Такие точки называются особыми точками поверхностей, например точки ребра возврата поверхности торса, вершина конической поверхности, точки поверхности вращения, где меридиан и ось пересекаются не под прямым углом и др.
Рисунок 5.34 - Касательная плоскость
Задача построения касательных плоскостей, проходящих через заданную точку на поверхности, сводится к следующему:
1.Через точку на кривой поверхности проводят две любые секущие
плоскости.
2.Находят линии сечения поверхности этими плоскостями.
3.Строят касательные в данной точке к линиям сечения.
Две касательные определяют собой искомую плоскость. При выборе секущих плоскостей стремятся получить простейший вид сечения – прямую линию или окружность.
Рассмотрим случай построения касательной плоскости через точку А, принадлежащую поверхности конуса вращения (рисунок 5.35).
Для построения двух необходимых сечений одна секущая плоскость проведена через заданную точку А и вершину конуса. Эта плоскость пересечет поверхность конуса по образующей, служащей линией касания, и поэтому является одной из прямых, которые определяют касательную плоскость. Вторая прямая m, касательная к окружности сечения конуса горизонтальной плоскостью уровня, проведенной через точку А. Касательную можно было провести и к окружности основания конуса.
Рисунок 5.35 – Касательная плоскость к поверхности конуса
5.6 Развертки поверхностей

Разверткой поверхности называется плоская фигура, образующаяся при совмещении поверхности с плоскостью.
Из геометрических свойств элементов поверхностей, сохраняющихся при развертывании, можно отметить, что линия поверхности переходит в линию развертки и что длины линий, величины плоских углов и площадей, ограниченных замкнутыми линиями, остаются неизменными.
Не все поверхности можно точно развернуть на плоскость. Поэтому поверхности разделяются на развертываемые и неразвертываемые. К развертываемым поверхностям относятся линейчатые поверхности: цилиндры, конусы и торсы, поскольку смежные образующие параллельны или пересекаются, т.е. образуют плоскость.
Для построения развертки прямого кругового цилиндра нужно построить прямоугольник с основанием 2πR, где R – радиус окружности основания. Высота прямоугольника равна высоте цилиндра (рисунок 5.36).
Рисунок 5.36 – Развертка прямого конуса
Развертка прямого кругового конуса представляет собой сектор круга, радиус которого является длиной образующей конуcа – L, с длиной
дуги 2πR, где R – радиус окружности основания. Угол сектора определяется по формуле φ =R/L * 360°.
Для определения положения точки на развертке конуса нужно определить положение образующей поверхности конуса, на которой находится искомая точка. Определить ее положение на натуральной величине образующей и перенести на построенное положение образующей на развертке (рисунок 5.37 ).
Рисунок 5.37 – Развертка прямого кругового конуса
Вопросы для самоконтроля по теме 5:
1.Как строится линия пересечения кривой поверхности плоскостью?
2.Какие линии получаются при пересечении цилиндра вращения плоскостями?
3.Какие кривые получаются при пересечении конуса вращения плоскостями?
4.Какие точки кривой линии сечения являются экстремальными?
5.В каких случаях для построения линии пересечения двух кривых поверхностей рекомендуется применять метод вспомогательных секущих плоскостей или метод вспомогательных секущих сфер?
6 КОМПЬЮТЕРНАЯ ГРАФИКА
6.1 Компьютерная графика и ее место в автоматизированном проектировании
Компьютерная графика изучает методы и средства создания и обработки изображений с помощью программно-аппаратных комплексов.
Компьютерная графика включает комплекс разнообразных программных средств, используемых для формирования, преобразования и выдачи на средства отображения (дисплеи, графопостроители) информации в визуальной форме.
Среди аппаратных средств можно выделить специализированные устройства и устройства общего применения.
К первым относятся такие средства ввода как световое перо, цифровые планшеты и средства вывода – графопостроители (рисунок 6.1).
Рисунок 6.1 – Специализированные устройства
Ко вторым - устройства ввода - манипуляторы типа «мышь» и «джойстик», и устройства вывода - растровые графические дисплеи, принтеры, клавиатура (рисунок 6.2).
Программное обеспечение ориентировано на следующие основные виды графики: деловую, иллюстративную, научную, конструкторскую (для САПР), картографическую (архитектурные и землеустроительные САПР), изобразительное искусство и рекламу.
Компьютерная графика развивалась в русле общего развития вычислительной техники и программного обеспечения. Первоначально создавались программы для вывода графиков в составе прикладных пакетов в составе языков высокого уровня. Например, в составе прикладных пакетов языка ФОРТРАН был создан пакет ГРАФОР.

Рисунок 6.2 – Устройства общего применения
Вдальнейшем создание графических программ выделилось в самостоятельное направление программного обеспечения.
Взависимости от способа формирования изображений компьютерную графику подразделяют на:
∙растровую графику;
∙векторную графику;
∙фрактальную графику.
Элементом изображения в растровых редакторах является точка. Точка может иметь несколько параметров: координаты, цвет, тон, прозрачность. Изображение составляется путем систематизации точек. При этом имеет место показатель разрешения изображения - количество точек на единицу площади изображения. Современные средства инженерной графики позволяют создавать изображения с разрешением 2540 dpi (точек на дюйм) и более. Каждая точка требует адресации для хранения на носителях. Значительный объем обрабатываемых данных, а также данных, необходимых для сохранения изображений, являются существенным недостатком растровой графики.

Общим недостатком растровых редакторов является то, что при увеличении масштаба изображения, точки увеличиваются соответственно, поэтому при укрупнении изображения теряется его разрешение и, как следствие, точность; невозможность работы с элементами (укрупненные изображения) – пикселизация.
Поскольку элементом изображения является точка, то линия уже будет требовать систематизации точек. Из этого можно сделать вывод, что создание двухмерных и трехмерных объектов существенно усложняют описание изображения, увеличивая объемы обрабатываемых и хранимых данных.
К растровым редакторам относятся Paint, Adobe Photoshop и др. Они предназначены для создания таких изображений как: художественные рисунки, иллюстрации, графики (рисунок 6.3).
Рисунок 6.3 – Примеры использования растровой графики
В векторной графике базовым элементом является линия. Линия описывается математически как единый объект, и поэтому объем данных для отображения объекта в векторной графике существенно ниже, чем в растровой.

Векторный графический редактор CorelDraw канадской фирмы Corel Corporation является одним из самых мощных графических редакторов. В основном программа используется как средство создания рекламных материалов, логотипов, иллюстративной и художественной графики.
Графическая система Adobe Illustrator относится к классу векторных графических редакторов (рисунок 6.4).
Рисунок 6.3 – Логотип векторного редактора
Фрактальная графика основывается на математических вычислениях. Базовым элементом фрактальной графики является сама математическая формула, таким образом изображение строится по уравнениям. Пример изображений фрактальной графики приведен на рисунке 6.4.
Рисунок 6.4 – Фрактал ХаоS
Все рассмотренные графические редакторы являются либо простейшими редакторами, например, Paint, либо редакторами широкого спектра
применения, решающими задачи в различных предметных областях, от обработки фотоизображений, до подготовки рекламных документов и т.д.
Некоторые из них могут применяться как инструмент подготовки конструкторской документации (CorelDraw). Но в этом качестве их использование не эффективно, так как у них отсутствуют некоторые специфические функции, используемые в профессиональной деятельности инженера, и наличие которых позволяет интегрировать их в САПР.
Как правило, в инженерной практике используются редакторы, реализованные на основе векторной графики.
6.2 Общие принципы построения САПР
На современных промышленных предприятиях, в конструкторских бюро разработка конструкторской документации и проектирование изделий базируется на применении вычислительной техники. В последнее время интенсивно идет процесс внедрения систем автоматизированного проектирования (САПР) конструкций и технологий, оснащенных современным программным обеспечением. Использование систем САПР позволяет существенно сократить сроки разработки конструкторской и технологической документации, существенно ускорить начало производства новых изделий, повысить качество, как самих конструкторских разработок, так и выпускаемой документации.
Типовая схема САПР включает: базу данных, имитатор, расчетный блок и экспертную систему (рисунке 6.5).
База данных содержит всю информацию, необходимую для проектирования, а также хранит весь тот прежний опыт, который был накоплен ранее в данной области.
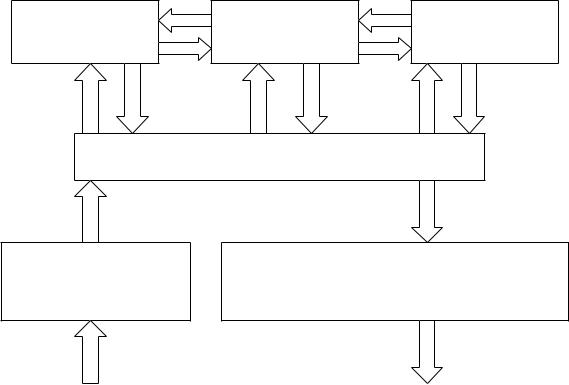
Три основных блока: имитатор, расчетный блок и экспертная система – выполняют все основные процедуры, в которых может возникнуть необходимость при проведении конструкторских работ.
Расчетный блок может выполнить любую программу из пакета прикладных программ, в котором находятся все нужные программы, используемые разработчиками. Вызов той или иной программы осуществляется по требованию либо имитатора или экспертной системы, либо самого конструктора.
Имитатор |
Расчетный блок |
Экспертная |
|
|
система |
База данных
Блок формирования заданий
Блок подготовки технической документации
Пользователь
Рисунок 6.5 – Типовая схема САПР В Блок формирования заданий проектировщик вводит техническое
задание на проектирование, в котором указаны все цели, которые необходимо достигнуть при проектировании, и все ограничения, которые нельзя нарушить.
Блок подготовки технической документации позволяет проектировщику готовить нужные документы для двух последних этапов создания новых изделий.
В конкретных системах могут наблюдаться отклонение от данной типовой схемы.
Рассмотрим конкретные примеры САПР и инженерных графических редакторов и систем CAD/CAM/ CAE
6.3 Функциональные возможности модулей 2D- 3D-моделирования
Графическая система AutoCAD является фактическим стандартом инженерных графических систем. Последние версии AutoCAD являются современными 32-разрядным Windows-приложениями для инженеров и пользователей САПР. Система AutoCAD позволяет организовать эффективную рабочую среду и, таким образом позволяет проектировщикам концентрироваться в большей степени на проектах и в меньшей степени уделять время вводу параметров с клавиатуры.
Такие функции, как многозадачная среда проектирования Multiple Design Environment, центр управления AutoCAD DesignCenter, поддержка Intellimouse и множество других, поддерживают естественную, интуитив- но-понятную, эффективную рабочую среду.
SOLIDCAM - продукт компании CADTECH Ltd. - мощный
инструмент получения управляющих программ для станков с ЧПУ при обработке деталей, содержащих сложную по-
верхностную или твердотельную геометрию. SOLIDCAM обеспечивает 2.5 и 3-осевую фрезерную обработку с гаран-
тированным отсутствием "подрезов", токарную обработку

тел вращения, визуализацию процесса резания с имитацией удаления материала.
Рисунок 6.6 – Использование программы SOLIDCAM в производстве
Система bCAD разрабатывалась для широкого спектра приложений, поэтому ее функциональность достаточно универсальна (рисунок 6.7).
Система bCAD спроектирована и разработана как универсальное рабочее место проектировщика, позволяющее проводить широкий спектр работ в “сквозном” режиме — от чертежа к объемной модели либо, наоборот, от трехмерного представления к плоским проекциям. При этом есть возможности изготовления технической документации в соответствии с требованиями стандартов, получения реалистичных изображений, подготовки данных для расчетных систем.
Рисунок 6.7 - Окно системвы bCAD
Подготовленные в bCAD растровые изображения могут быть записаны в форматах GIF, TGA, BMP, JPG, TIFF или PCX, и использоваться в издательских или иллюстративных пакетах.
В последнее время при разработке конструкторской документации в учебном процессе технических вузов широко используется система КОМПАС-3D, разработанная российской компанией АСКОН.
Чертежно-конструкторский редактора КОМПАС-3D содержит достаточный чертежный инструментарий для выполнения чертежей любого уровня сложности с полной поддержкой российских стандартов. Простой и понятный интерфейс этой программы удачно сочетается с гибкостью профессиональной системы при построении, выделении, удалении объектов чертежа, наборе текста по ГОСТ, простановке размеров всех типов, допусков формы и расположения поверхностей, позиций, баз и т.д.
КОМПАС-3D разработан специально для операционной среды MS Windows и в полной мере использует все ее возможности и преимущества, предоставляя пользователю максимальную эффективность и удобства в работе.
В КОМПАС-3D поддерживаются следующие графические объекты.
Геометрические объекты: |
точка, |
прямая, |
отрезок прямой, окруж- |
||||
ность, |
дуга окружности, |
эллипс, |
многоугольник, |
ломаная линия, |
|||
кривая Безье, |
NURBS-кривая, |
штриховка, |
эквидистантная кривая, |
||||
макроэлемент. |
|
|
|
|
|
|
|
Размеры: |
размер линейный, |
размер угловой, |
размер радиаль- |
||||
ный, |
размер диаметральный, |
размер высоты. |
|
|
|||
Специальные и технологические обозначения: |
многострочная |
||||||
текстовая надпись, обозначение базы, допуск формы и расположения,
символ шероховатости, |
линия-выноска, |
обозначение маркировки, |
обозначение клеймения, |
стрелка направления взгляда, линия разреза |
|
или сечения, обозначение центра. |
|
|
Объекты оформления чертежа: технические требования, основная надпись (штамп), обозначение шероховатости неуказанных поверхностей.
Основными документами в системе КОМПАС-3D является:
чеpтеж, фрагмент, тектовый документ, спецификация, сборка и деталь.
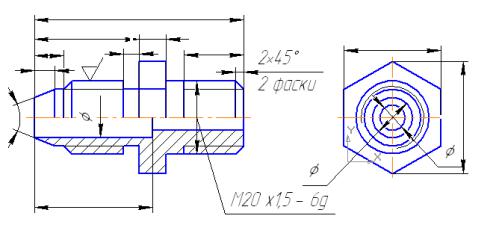
Основная задача, решаемая при помощи любой чертежной системы - создание и выпуск различной графической документации (рисунок 6.10).
Рисунок 6.10 – Фрагмент чертежа детали в КОМПАС-3D
Наиболее простым и понятным способом построения является прямое указание курсором точек на поле ввода. Например, при создании отрезка выполняется последовательная фиксация его начальной точки, а затем конечной точки.
Другим способом является указание точных значений координат для перемещения в нужную точку и ее последующая фиксация. Для отображения и ввода координат предназначены специальные поля X и Y, отображаемые в правой части Строки текущего состояния.
И, наконец, самые широкие возможности управления чертежными объектами позволяет реализовать Строка параметров объектов.
Сдвигать объекты чертежа или фрагмента можно либо при помощи мыши, либо прибегая к командам меню.
Базовыми приемами работы являются: перемещение объектов при помощи мыши; копирование объектов при помощи мыши; простое удаление графических объектов; редактирование характерных точек объектов; редактирование параметров объектов.
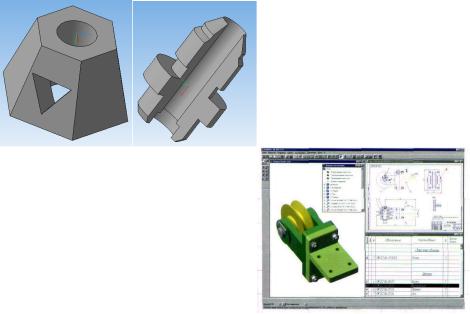
Система КОМПАС-3D способна формировать трехмерные модели детали с целью передачи геометрии в различные расчетные параметры или в пакеты разработки управляющих программ для оборудования с ЧПУ, а также создавать конструкторскую документацию на разработанные детали (рисунок 6.11).
Рисунок 6.11Пример работы в КОМПАС-3D
Основные задачи, которые решает КОМПАС-3D - формирование трехмерной модели детали с целью передачи геометрии в различные расчетные пакеты или в пакеты разработки управляющих программ для обо-
рудования с ЧПУ, а также создание конструкторской документации на разрабатываемые детали.
Общепринятым порядком моделирования твердого тела является последовательное выполнение булевых операций (объединения, вычитания и пересечения) над объемными элементами (сферами, призмами, цилиндрами, конусами, пирамидами и т.д.). Пример выполнения таких операций показан на рисунке 6.12.
Рисунок 6.12 – Пример выполнения булевых операций
Булевы операции над объемными элементами: а) цилиндр; б) объединение цилиндра и призмы; в) вычитание призмы; г) вычитание цилиндра.
В КОМПАС-3D для задания формы объемных элементов выполняется такое перемещение плоской фигуры в пространстве, след от которого определяет форму элемента (например, поворот дуги окружности вокруг оси образует сферу или тор, смещение многоугольника - призму, и т.д.). Образование объемных элементов: а) призмы, б) тора, в) кинематического элемента (рисунок 6.12).
Рисунок 6.12 – Образование объемных элементов
Плоская фигура, на основе которой образуется тело, называется эскизом, а формообразующее перемещение эскиза - операцией.
Вопросы для самоконтроля по теме 6:
1.Что включает понятие «компьютерная графика»?
2.Что принадлежит к аппаратным средствам компьютерной графики?
3.Перечислите основные виды графики.
4.По способу формирования изображений компьютерная графика подразделяется на ……….. В чем их различие?
5.Что является базовым элементом фрактальной графики?
6.Что является базовым элементом векторной графики?
7.Каковы элементы типовой системы автоматизированного проектирования?
8.Назовите известные вам инженерные графические системы.
9.Какие операции используются для моделирования твердого тела?
Список литературы
1.Рынин Н.А. Начертательная геометрия. Ортогональные проекции. Петроград, 1918.- 334 с.
2.Гордон В.О. Курс начертательной геометрии /В.О. Гордон, М.А. Семенцов -Огиевский. - М: «Наука», 2002. - 382с.
3.Винницкий И.Г. Начертательная геометрия. Учебник для вузов. – М.: «Высш.школа», 1975.- 280с., с ил.
4.Порсин Ю.А. Аксонометрические изображения машиностроительных деталей. Изд.2-е, перераб. и доп.-Л.: «Машиностроение», 1976.- 232с., с ил.
5.Виноградов В.Н. Начертательная геометрия. Минск, «Вышэйш. Школа», 1977. -308с., с ил.
6.Бубенников А.В. Начертательная геометрия. Учебник для вузов.- М.:
Высш. шк., 1985.-288с., ил.
7. Арустамов Х.А. Сборник задач по начертательной геометрии
/ Х.А. Арустамов. - М: «Машиностроение», 1981. - 446с.
8.Инженерная графика: общий курс: Учебник/ Под ред. Н.Г. Иванцивской и В.Г. Бурова.- Изд. 2-е, перераб. и доп.-М.: Логос, 2004.- 232с.: илл.
9.Пеклич В.А. Начертательная геометрия/Учебное издание.- М.: Издательство Ассоциации строительных вузов, 2007.-272с., с илл.