

- •Block Reference
- •Commonly Used
- •Continuous
- •Discontinuities
- •Discrete
- •Logic and Bit Operations
- •Lookup Tables
- •Math Operations
- •Model Verification
- •Model-Wide Utilities
- •Ports & Subsystems
- •Signal Attributes
- •Signal Routing
- •Sinks
- •Sources
- •User-Defined Functions
- •Additional Math & Discrete
- •Additional Discrete
- •Additional Math: Increment — Decrement
- •Run on Target Hardware
- •Target for Use with Arduino Hardware
- •Target for Use with BeagleBoard Hardware
- •Target for Use with LEGO MINDSTORMS NXT Hardware
- •Blocks — Alphabetical List
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Settings Pane
- •Measurements Pane
- •Signal Statistics Measurements
- •Settings Pane
- •Transitions Pane
- •Overshoots/Undershoots
- •Cycles
- •Settings Pane
- •Peaks Pane
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Command-Line Information
- •Function Reference
- •Model Construction
- •Simulation
- •Linearization and Trimming
- •Data Type
- •Examples
- •Main Toolbar
- •Command-Line Alternative
- •Command-Line Alternative
- •Command-Line Alternative
- •Command-Line Alternative
- •Command-Line Alternative
- •Command-Line Alternative
- •Mask Icon Drawing Commands
- •Simulink Classes
- •Model Parameters
- •About Model Parameters
- •Examples of Setting Model Parameters
- •Common Block Parameters
- •About Common Block Parameters
- •Examples of Setting Block Parameters
- •Block-Specific Parameters
- •Mask Parameters
- •About Mask Parameters
- •Notes on Mask Parameter Storage
- •Simulink Identifier
- •Simulink Identifier
- •Model Advisor Checks
- •Simulink Checks
- •Simulink Check Overview
- •See Also
- •Identify unconnected lines, input ports, and output ports
- •Description
- •Results and Recommended Actions
- •Capabilities and Limitations
- •Tips
- •See Also
- •Check root model Inport block specifications
- •Description
- •Results and Recommended Actions
- •See Also
- •Check optimization settings
- •Description
- •Results and Recommended Actions
- •Tips
- •See Also
- •Description
- •Results and Recommended Actions
- •See Also
- •Check for implicit signal resolution
- •Description
- •Results and Recommended Actions
- •See Also
- •Check for optimal bus virtuality
- •Description
- •Results and Recommended Actions
- •Capabilities and Limitations
- •See Also
- •Description
- •Results and Recommended Actions
- •Capabilities and Limitations
- •See Also
- •Identify disabled library links
- •Description
- •Results and Recommended Actions
- •Capabilities and Limitations
- •Tips
- •See Also
- •Identify parameterized library links
- •Description
- •Results and Recommended Actions
- •Capabilities and Limitations
- •Tips
- •See Also
- •Identify unresolved library links
- •Description
- •Results and Recommended Actions
- •Capabilities and Limitations
- •See Also
- •Results and Recommended Actions
- •Capabilities and Limitations
- •See Also
- •Results and Recommended Actions
- •Capabilities and Limitations
- •See Also
- •Check usage of function-call connections
- •Description
- •Results and Recommended Actions
- •See Also
- •Check signal logging save format
- •Description
- •Results and Recommended Actions
- •See Also
- •Description
- •Results and Recommended Actions
- •See Also
- •Description
- •Results and Recommended Actions
- •Tips
- •See Also
- •Check data store block sample times for modeling errors
- •Description
- •Results and Recommended Actions
- •See Also
- •Check for potential ordering issues involving data store access
- •Description
- •Results and Recommended Actions
- •Tips
- •See Also
- •Check for partial structure parameter usage with bus signals
- •Description
- •Results and Recommended Actions
- •Tips
- •See Also
- •Check for calls to slDataTypeAndScale
- •Description
- •Results and Recommended Actions
- •Tips
- •See Also
- •Check for proper bus usage
- •Description
- •Results and Recommended Actions
- •Action Results
- •Tips
- •See Also
- •Description
- •Results and Recommended Actions
- •See Also
- •Description
- •Results and Recommended Actions
- •See Also
- •Check for proper Merge block usage
- •Description
- •Input Parameters
- •Results and Recommended Actions
- •See Also
- •Description
- •Results and Recommended Actions
- •Action Results
- •See Also
- •Check for non-continuous signals driving derivative ports
- •Description
- •Results and Recommended Actions
- •See Also
- •Runtime diagnostics for S-functions
- •Description
- •Results and Recommended Actions
- •See Also
- •Check file for foreign characters
- •Description
- •Results and Recommended Actions
- •Tips
- •See Also
- •Check model for known block upgrade issues
- •Description
- •Results and Recommended Actions
- •Action Results
- •See Also
- •Description
- •Results and Recommended Actions
- •Action Results
- •See Also
- •Check that the model is saved in SLX format
- •Description
- •Results and Recommended Actions
- •Tips
- •See Also
- •Check Model History properties
- •Description
- •Results and Recommended Actions
- •See Also
- •Analyze model hierarchy for upgrade issues
- •Description
- •Results and Recommended Actions
- •Tips
- •See Also
- •Description
- •Results and Recommended Actions
- •See Also
- •Simulink Performance Advisor Checks
- •Simulink Performance Advisor Check Overview
- •See Also
- •Baseline
- •See Also
- •Check Preupdate Items
- •See Also
- •Checks that need Update Diagram
- •See Also
- •Checks that require simulation to run
- •See Also
- •Check Accelerator Settings
- •See Also
- •Create Baseline
- •See Also
- •Identify resource intensive diagnostic settings
- •See Also
- •Check optimization settings
- •See Also
- •Identify inefficient lookup table blocks
- •See Also
- •Identify Interpreted MATLAB Function blocks
- •See Also
- •Check MATLAB Function block debug settings
- •See Also
- •Check Stateflow block debug settings
- •See Also
- •Identify simulation target settings
- •See Also
- •Check model reference rebuild setting
- •See Also
- •Check Model Reference parallel build
- •See Also
- •Check solver type selection
- •See Also
- •Select normal or accelerator simulation mode
- •See Also
- •Simulink Limits
- •Maximum Size Limits of Simulink Models
- •Index
- •Filter Structures and Filter Coefficients
- •Valid Initial States
- •Number of Delay Elements (Filter States)
- •Frame-Based Processing
- •Sample-Based Processing
- •Valid Initial States
- •Frame-Based Processing
- •Sample-Based Processing
- •Model Parameters in Alphabetical Order
- •Common Block Parameters
- •Continuous Library Block Parameters
- •Discontinuities Library Block Parameters
- •Discrete Library Block Parameters
- •Logic and Bit Operations Library Block Parameters
- •Lookup Tables Block Parameters
- •Math Operations Library Block Parameters
- •Model Verification Library Block Parameters
- •Model-Wide Utilities Library Block Parameters
- •Ports & Subsystems Library Block Parameters
- •Signal Attributes Library Block Parameters
- •Signal Routing Library Block Parameters
- •Sinks Library Block Parameters
- •Sources Library Block Parameters
- •User-Defined Functions Library Block Parameters
- •Additional Discrete Block Library Parameters
- •Additional Math: Increment - Decrement Block Parameters
- •Mask Parameters

7
Simulink Classes
eventData |
Provide information about block |
|
method execution events |
getDescription |
Extract file description without |
|
loading block diagram into memory |
getMetadata |
Extract file metadata without |
|
loading block diagram into memory |
Simulink.AliasType |
Create alias for signal and/or |
|
parameter data type |
Simulink.Annotation |
Specify properties of model |
|
annotation |
Simulink.BlockCompDworkData |
Provide postcompilation information |
|
about block’s DWork vector |
Simulink.BlockCompInputPortData |
Provide postcompilation information |
|
about block input port |
Simulink.BlockCompOutputPortData |
Provide postcompilation information |
|
about block output port |
Simulink.BlockData |
Provide run-time information about |
|
block-related data, such as block |
|
parameters |
Simulink.BlockPath |
|
Simulink.BlockPortData |
Describe block input or output port |
Simulink.BlockPreCompInputPortDataProvide precompilation information about block input port
Simulink.BlockPreCompOutputPortDataProvide precompilation information about block output port

7 Simulink Classes
Simulink.Bus |
Specify properties of signal bus |
Simulink.BusElement |
Describe element of signal bus |
Simulink.ConfigSet |
Access model configuration set |
Simulink.ConfigSetRef |
Link model to configuration set |
|
stored independently of any model |
Simulink.GlobalDataTransfer |
Configure concurrent execution data |
|
transfers |
Simulink.Mask |
Control masks programmatically |
Simulink.MaskParameter |
Manipulate mask parameters |
|
programmatically |
Simulink.MDLInfo |
Extract model file information |
|
without loading block diagram into |
|
memory |
Simulink.ModelAdvisor |
Run Model Advisor from MATLAB |
|
file |
Simulink.ModelDataLogs |
Container for model’s signal data |
|
logs |
Simulink.ModelManagement.Project.CurrentProjManipulatectthe currently open Simulink project from the command line
Simulink.ModelWorkspace |
Describe model workspace |
Simulink.MSFcnRunTimeBlock |
Get run-time information about |
|
Level-2 MATLAB S-function block |
Simulink.NumericType |
Specify data type |
Simulink.ParamCoderInfo |
Specify information needed to |
|
generate code for parameter |
Simulink.Parameter |
Specify value, value range, data |
|
type, and other properties of block |
|
parameter |
7-2

Simulink.RunTimeBlock |
Allow Level-2 MATLAB S-function |
|
and other MATLAB programs to |
|
get information about block while |
|
simulation is running |
Simulink.SampleTime |
Object containing sample time |
|
information |
Simulink.ScopeDataLogs |
Store data logged by Scope signal |
|
viewer |
Simulink.sdi.DiffRunResult |
Results from comparing two |
|
simulation runs |
Simulink.sdi.DiffSignalResult |
Results from comparing two signals |
Simulink.sdi.Run |
Manages signal data and metadata |
|
of simulation run |
Simulink.sdi.Signal |
Manages signal time series data and |
|
metadata |
Simulink.Signal |
Specify attributes of signal |
Simulink.SignalCoderInfo |
Specify information needed to |
|
generate code for signal |
Simulink.SimState.ModelSimState |
Access SimState snapshot data |
Simulink.SimulationData.BlockPath |
Fully specified Simulink block path |
Simulink.SimulationData.Dataset |
Container for logged data using |
|
MATLAB timeseries objects |
Simulink.SimulationData.DataStoreMemory Simulink.SimulationData.LoggingInfo Signal logging override settings
Simulink.SimulationData.ModelLoggingInfoSignal logging override settings for a model
Simulink.SimulationData.Signal
Simulink.SimulationData.SignalLoggingISignalfo logging override settings for signal
Simulink.SimulationOutput |
Access object values of simulation |
|
results |
7-3

7 Simulink Classes
Simulink.SoftwareTarget.AperiodicTriggerDescribe aperiodic trigger Simulink.SoftwareTarget.PeriodicTriggerDescribe periodic trigger
Simulink.SoftwareTarget.PosixSignalHandlerDescribe aperiodic trigger for POSIX targets
Simulink.SoftwareTarget.Task |
Describe task that models unit of |
|
concurrent execution |
Simulink.SoftwareTarget.TaskConfigurationConfigure model for concurrent |
|
|
execution |
Simulink.SoftwareTarget.Trigger |
Base class for PeriodicTrigger and |
|
AperiodicTrigger |
Simulink.SoftwareTarget.WindowsEventHandlerDescribe aperiodic trigger for |
|
|
Windows® targets |
Simulink.SubsysDataLogs |
Container for subsystem’s signal |
|
data logs |
Simulink.TimeInfo |
Provide information about time data |
|
in Simulink.Timeseries object |
Simulink.Timeseries |
Store data for any signal except mux |
|
or bus signal |
Simulink.TsArray |
Store data for mux or bus signal |
Simulink.VariableUsage |
Get information about workspace |
|
variables and blocks that use them |
Simulink.Variant |
Specify a model reference variant |
|
and its execution environment |
Simulink.WorkspaceVar |
Contains information about |
|
workspace variables and blocks that |
|
use them |
7-4
eventData
Purpose
Description
Parent
Children
Property
Summary
Properties
Provide information about block method execution events
Simulink software creates an instance of this class when a block method execution event occurs during simulation and passes it to any listeners registered for the event (see add_exec_event_listener). The instance specifies the type of event that occurred and the block whose method execution triggered the event. See “Access Block Data During Simulation” for more information.
None
None
|
Name |
Description |
|
|
“Type” |
Type of method execution event that occurred. |
|
|
“Source” |
Block that triggered the event. |
|
|
|
|
|
Type
Description
Type of method execution event that occurred. Possible values are:
|
event |
Occurs... |
|
|
'PreOutputs' |
Before a block’s Outputs method executes. |
|
|
'PostOutputs' |
After a block’s Outputs method executes. |
|
|
'PreUpdate' |
Before a block’s Update method executes. |
|
|
'PostUpdate' |
After a block’s Update method executes. |
|
|
'PreDerivatives' |
Before a block’s Derivatives method executes. |
|
|
'PostDerivatives' |
After a block’s Derivatives method executes. |
|
|
Data Type |
|
|
|
string |
|
|
7-5

eventData
Access
RO
Source
Description
Block that triggered the event
Data Type
Simulink.RunTimeBlock
Access
RO
7-6

Simulink.AliasType
Purpose |
Create alias for signal and/or parameter data type |
Description This class allows you to designate MATLAB variables as aliases for signal and parameter data types. You do this by creating instances of this class and assigning them to variables in the MATLAB or model workspaces (see “Creating a Data Type Alias” on page 7-7). The MATLAB variable to which a Simulink.AliasType object is assigned is called a data type alias. The data type to which an alias refers is called its base type. Simulink software allows you to set the BaseType property of the object that the variable references, thereby designating the data type for which it is an alias.
Simulink software lets you use aliases instead of actual type names in dialog boxes and set_param commands to specify the data types of Simulink block outputs and parameters. Using aliases to specify signal and parameter data types can greatly simplify global changes to the signal and parameter data types that a model specifies. In particular,
changing the data type of all signals and parameters whose data type is specified by an alias requires only changing the base type of the alias. By contrast, changing the data types of signals and parameters whose data types are specified by an actual type name requires respecifying the data type of each signal and parameter individually.
Note Suppose you specify an instance of the Simulink.AliasType class as the value of a Simulink.Parameter object’s Data type property. If you enter the parameter object in a subsystem’s mask, the subsystem displays the data type’s base type instead of its alias name.
Creating a Data Type Alias
You can use either the Model explorer or MATLAB commands (see “MATLAB Commands for Creating Data Type Aliases” on page 7-8) to create a data type alias.
To use the Model explorer to create an alias:
7-7

Simulink.AliasType
1Select Base Workspace (i.e., the MATLAB workspace) in the Model explorer’s Model Hierarchy pane.
You must create data type aliases in the MATLAB workspace. If you attempt to create an alias in a model workspace, Simulink software displays an error.
2Select Simulink.AliasType from the Model explorer’s Add menu.
Simulink software creates an instance of a Simulink.AliasType object and assigns it to a variable named Alias in the MATLAB workspace.
3Rename the variable to a more appropriate name, for example, a name that reflects its intended usage.
To change the name, edit the name displayed in the Name field in the Model explorer’s Contents pane.
4Enter the name of the data type that this alias represents in the Base type field in the Model explorer’s Dialog pane.
You can specify the name of any existing standard or user-defined data type in this field. Skip this step if the desired base type is double (the default).
5Use the MATLAB save command to save the newly created alias in a MAT-file that can be loaded by the models in which it is used.
MATLAB Commands for Creating Data Type Aliases
Use the following syntax to create a data type alias at the MATLAB command line or in a MATLAB program
ALIAS = Simulink.AliasType;
where ALIAS is the name of the variable that you want to serve as the alias. For example, the following line creates an alias names MyFloat.
MyFloat = Simulink.AliasType;
7-8

Simulink.AliasType
The following notations get and set the properties of a data type alias, respectively,
PROPVALUE = ALIAS.PROPNAME;
ALIAS.PROPNAME = PROPVALUE;
where ALIAS is the name of the alias object, PROPNAME is the name of the alias object’s properties, and PROPVALUE is the property’s value. For example, the following code saves the current value of MyFloat’s BaseType property and assigns it a new value.
old = MyFloat.BaseType; MyFloat.BaseType = 'single';
See “Properties” on page 7-13 for information on the names, permitted values, and usage of the properties of data type alias objects.
Data Type Aliases in the Generated Code
If you have a Simulink Coder license, you can cause data type aliases to appear in the code generated for a model using any of the following methods.
•Specifying the signal data type of a block in the model as a
Simulink.AliasType via the Block Parameters dialog box.
•Creating a Simulink.Signal object that uses the Simulink.AliasType as its data type. Use this signal
object as the name of a signal in the model and specify that the signal name must resolve to an object in the MATLAB workspace. See “Signal Objects” in the Simulink Coder User’s Guide for more information.
•Creating a Simulink.Parameter object that uses the Simulink.AliasType as its data type. Use this parameter object as a block parameter in the model. See “Generated Code for
Parameter Data Types” in the Simulink Coder User’s Guide for more information.
7-9

Simulink.AliasType
Notes
•If you assign a data type in a block’s Block Parameters dialog box and by using a Simulink.Signal object on the signal feeding into the block, the code is always generated using the data type in the dialog box.
•The Simulink Coder code generator tries to preserve the names of alias types in the generated code. However, in some cases, an alias type name might revert to its underlying equivalent built-in data type. If you have a Embedded Coder license, you can guarantee that the code generator uses the alias type name in the generated code, by using replacement types (see “Data Type Replacement” in the Embedded Coder documentation).
•The Simulink.AliasType class does not support multiword data types for code generation.
Parent None
Children None
7-10

Simulink.AliasType
Property
Dialog
Box
Base type
The data type to which this alias refers. The default is double. To specify another data type, select the data type from the adjacent pull-down list of standard data types or enter the data type’s name in the edit field. Note that you can, with one exception, specify a nonstandard data type, e.g., a data type defined by a Simulink.NumericType object, by entering the data type’s name in the edit field. The exception is a Simulink.NumericType whose
Category is Fixed-point: unspecified scaling.
7-11

Simulink.AliasType
Note Fixed-point: unspecified scaling is a partially specified type whose definition is completed by the block that uses the Simulink.NumericType. Forbidding its use in alias types avoids creating aliases that have different base types depending on where they are used.
Data scope
Specifies whether the data type definition should be imported from, or exported to, a header file during code generation. The possible values are:
|
Value |
Action |
|
|
Auto (default) |
If no value is specified for Header file, export |
|
|
|
the type definition to model_types.h, where |
|
|
|
model is the model name. |
|
|
|
If a value is specified for Header file, import |
|
|
|
the data type definition from the specified |
|
|
|
header file. |
|
|
Exported |
Export the data type definition to a header |
|
|
|
file, which can be specified in the Header |
|
|
|
file field. If no value is specified for Header |
|
|
|
file, the header file name defaults to type.h, |
|
|
|
wheretype is the data type name. |
|
|
Imported |
Import the data type definition from a header |
|
|
|
file, which can be specified in the Header |
|
|
|
file field. If no value is specified for Header |
|
|
|
file, the header file name defaults to type.h, |
|
|
|
wheretype is the data type name. |
|
Header file
Name of a C header file from which a data type definition is imported, or to which a data type definition is exported, based on
7-12

Simulink.AliasType
Properties
See Also
the value of Data scope. If this field is specified, the specified name is used during code generation for importing or exporting. If this field is empty, the value defaults to type.h if Data scope equals Imported or Exported, or defaults to model_types.h if
Data scope equals Auto.
Description
Describes the usage of the data type referenced by this alias.
|
Name |
Description |
|
|
BaseType |
A string specifying the name of a standard or custom |
|
|
|
data type. (Base type) |
|
|
DataScope |
A string specifying whether the data type definition |
|
|
|
should be imported from, or exported to, a header file |
|
|
|
during code generation. (Data scope) |
|
|
Description |
A string that describes the usage of the data type. |
|
|
|
May be a null string. (Description) |
|
|
HeaderFile |
A string that specifies the name of a C header file |
|
|
|
from which a data type definition is imported, or to |
|
|
|
which a data type definition is exported, during code |
|
|
|
generation. (Header file) |
|
“Generate Code Including User-Defined Data Types” in the Embedded Coder documentation
7-13

Simulink.Annotation
Purpose |
Specify properties of model annotation |
Description |
Instances of this class specify the properties of annotations. You can |
|
use getCallbackAnnotation in an annotation callback function to get |
|
the Simulink.Annotation instance for the annotation associated with |
|
the callback function. You can use find_system and get_param to get |
|
the Simulink.Annotation instance associated with any annotation in |
|
a model. For example, the following code gets the annotation object |
|
for the first annotation in the currently selected model and turns on |
|
its drop shadow |
|
ah = find_system(gcs, 'FindAll', 'on', 'type', 'annotation'); |
|
ao = get_param(ah(1), 'Object'); |
|
ao.DropShadow = 'on'; |
Children |
None. |
Property
Summary
|
Property |
Description |
Values |
|
|
Text |
String specifying text of |
string |
|
|
|
annotation. Same as Name. |
|
|
|
ClickFcn |
Specifies MATLAB code to |
string |
|
|
|
be executed when a user |
|
|
|
|
single-clicks this annotation. |
|
|
|
|
Simulink software stores |
|
|
|
|
the code entered in this |
|
|
|
|
field with the model. See |
|
|
|
|
“Associate Click Functions |
|
|
|
|
with Annotations” for more |
|
|
|
|
information. |
|
|
|
Description |
String that describes this |
string |
|
|
|
annotation. |
|
|
7-14
Simulink.Annotation
|
Property |
Description |
Values |
|
|
FontAngle |
String specifying the angle |
'normal' | 'italic' | |
|
|
|
of the annotation’s font. |
'oblique' | {'auto'} |
|
|
|
The default value, 'auto', |
|
|
|
|
specifies use of the model’s |
|
|
|
|
preferred font angle. |
|
|
|
FontName |
String specifying name of |
string |
|
|
|
annotation’s font. The default |
|
|
|
|
value, 'auto', specifies use of |
|
|
|
|
the model’s preferred font. |
|
|
|
FontSize |
Integer specifying size of |
real {'-1'} |
|
|
|
annotation’s font in points. |
|
|
|
|
The default value, -1, specifies |
|
|
|
|
use of the model’s preferred |
|
|
|
|
font size. |
|
|
|
FontWeight |
String specifying the weight |
'light' | 'normal' | 'demi' | |
|
|
|
of the annotation’s font. |
'bold' | {'auto'} |
|
|
|
The default value, 'auto', |
|
|
|
|
specifies use of the model’s |
|
|
|
|
preferred font weight. |
|
|
|
Handle |
Annotation handle. |
real |
|
|
HiliteAncestors |
For internal use. |
|
|
|
Name |
String specifying text of |
string |
|
|
|
annotation. Same as Text. |
|
|
|
Selected |
String specifying whether |
{'on'} | 'off' |
|
|
|
this annotation is currently |
|
|
|
|
selected ('on’) or not selected |
|
|
|
|
('off'). |
|
|
|
Parent |
String specifying parent name |
string |
|
|
|
of annotation object. |
|
|
|
Path |
Path to the annotation. |
string |
|
|
|
|
|
|
7-15

Simulink.Annotation
|
Property |
Description |
Values |
|
|
|
Position |
Two-element vector specifying |
vector [left bottom] |
|
|
|
|
the x-y coordinates of this |
not enclosed in quotation marks. |
|
|
|
|
annotation relative to the |
The maximum value for a |
|
|
|
|
top, left corner of the block |
coordinate is 32767. |
|
|
|
|
diagram, e.g., [236 83]. |
|
|
|
|
Horizontal- |
String specifying the |
{'center'} | 'left'|'right' |
|
|
|
Alignment |
horizontal alignment of this |
|
|
|
|
|
annotation, e.g., 'center'. |
|
|
|
|
VerticalAlignment |
String specifying the vertical |
{'middle'} | |
|
|
|
|
alignment of this annotation, |
'top'|'cap'|'baseline'|'bottom' |
|
|
|
|
e.g., 'middle'. |
|
|
|
|
ForegroundColor |
String specifying foreground |
RGB value array string | |
|
|
|
|
color of this annotation. |
[r,g,b,a] where r, g, b, |
|
|
|
|
|
and a are the red, green, blue, and |
|
|
|
|
|
alpha values of the color normalized |
|
|
|
|
|
to the range 0.0 to 1.0, delineated |
|
|
|
|
|
with commas. The alpha value is |
|
|
|
|
|
optional and ignored. |
|
|
|
|
|
Block background color can also be |
|
|
|
|
|
'black', 'white', 'red', 'green', |
|
|
|
|
|
'blue', 'cyan', 'magenta', |
|
|
|
|
|
'yellow', 'gray', 'lightBlue', |
|
|
|
|
|
'orange', 'darkGreen'. |
|
|
7-16

Simulink.Annotation
|
Property |
Description |
Values |
|
|
BackgroundColor |
String specifying background |
RGB value array string | |
|
|
|
color of this annotation. |
[r,g,b,a] where r, g, b, |
|
|
|
|
and a are the red, green, blue, and |
|
|
|
|
alpha values of the color normalized |
|
|
|
|
to the range 0.0 to 1.0, delineated |
|
|
|
|
with commas. The alpha value is |
|
|
|
|
optional and ignored. |
|
|
|
|
Block background color can also be |
|
|
|
|
'black', 'white', 'red', 'green', |
|
|
|
|
'blue', 'cyan', 'magenta', |
|
|
|
|
'yellow', 'gray', 'lightBlue', |
|
|
|
|
'orange', 'darkGreen'. |
|
|
DropShadow |
String specifying whether |
'on' | {'off'} |
|
|
|
to display a drop shadow. |
|
|
|
|
Options are 'on' or 'off'. |
|
|
|
TeXMode |
String specifying whether to |
'on' | {'off'} |
|
|
|
render TeX markup. Options |
|
|
|
|
are 'on' or 'off'. |
|
|
|
Type |
Annotation type. This is |
string |
|
|
|
always 'annotation' |
|
|
|
LoadFcn |
String specifying M-code |
string |
|
|
|
to be executed when the |
|
|
|
|
model containing this |
|
|
|
|
annotation is loaded. See |
|
|
|
|
“Annotation Callback |
|
|
|
|
Functions” in the online |
|
|
|
|
Simulink documentation. |
|
|
7-17

Simulink.Annotation
|
Property |
Description |
Values |
|
|
DeleteFcn |
String specifying M-code |
string |
|
|
|
to be executed before |
|
|
|
|
deleting this annotation. |
|
|
|
|
See “Annotation Callback |
|
|
|
|
Functions” in the online |
|
|
|
|
Simulink documentation. |
|
|
|
RequirementInfo |
For internal use. |
string |
|
|
Tag |
User-specified text that is |
string |
|
|
|
assigned to the annotation’s |
|
|
|
|
Tag parameter and saved with |
|
|
|
|
the annotation. |
|
|
|
UseDisplayText- |
String specifying whether to |
'on' | {'off'} |
|
|
AsClickCallback |
use the contents of the Text |
|
|
|
|
property as this annotation’s |
|
|
|
|
click function. Options are |
|
|
|
|
'on' or 'off'. |
|
|
|
|
If set to 'on', the text of the |
|
|
|
|
annotation is interpreted as a |
|
|
|
|
valid MATLAB expression and |
|
|
|
|
run. If set to 'off', clicking |
|
|
|
|
on the annotation runs the |
|
|
|
|
click function, if there is one. |
|
|
|
|
If there is no click function, |
|
|
|
|
clicking the annotation has no |
|
|
|
|
effect. |
|
|
|
|
See “Associate Click Functions |
|
|
|
|
with Annotations” in the |
|
|
|
|
Simulink documentation for |
|
|
|
|
more information. |
|
|
|
UserData |
Any data that you want to |
vector |
|
|
|
associate with this annotation. |
|
|
7-18

Simulink.BlockCompDworkData
Purpose
Description
Parent
Children
Property
Summary
Properties
Provide postcompilation information about block’s DWork vector
Simulink software returns an instance of this class when a MATLAB program, e.g., a Level-2 MATLAB S-function, invokes the “Dwork” on page 7-175 method of a block’s run-time object after the model containing the block has been compiled.
Simulink.BlockData
None
|
Name |
Description |
|
|
“Usage” on page 7-19 |
Usage type of this DWork vector. |
|
|
“UsedAsDiscState” |
True if this DWork vector is being used to |
|
|
|
store the values of a block’s discrete states. |
|
Usage
Description
Returns a string indicating how this DWork vector is used. Permissible values are:
•DWork
•DState
•Scratch
•Mode
Data Type string
Access
RW for MATLAB S-function blocks, RO for other blocks.
7-19

Simulink.BlockCompDworkData
UsedAsDiscState
Description
True if this DWork vector is being used to store the values of a block’s discrete states.
Data Type
Boolean
Access
RW for MATLAB S-Function blocks, RO for other blocks.
7-20

Simulink.BlockCompInputPortData
Purpose
Description
Parent
Children
Property
Summary
Properties
Provide postcompilation information about block input port
Simulink software returns an instance of this class when a MATLAB program, e.g., a Level-2 MATLAB S-function, invokes the “InputPort” on page 7-176 method of a block’s run-time object after the model containing the block has been compiled.
Simulink.BlockPortData
None
|
Name |
Description |
|
|
“DirectFeedthrough” |
True if this port has direct feedthrough. |
|
|
“Overwritable” |
True if this port is overwritable. |
|
|
|
|
|
DirectFeedthrough
Description
True if this input port has direct feedthrough.
Data Type
Boolean
Access
RW for MATLAB S functions, RO for other blocks.
Overwritable
Description
True if this input port is overwritable.
Data Type
Boolean
Access
RW for MATLAB S functions, RO for other blocks.
7-21
Simulink.BlockCompOutputPortData
Purpose
Description
Parent
Children
Property
Summary
Properties
Provide postcompilation information about block output port
Simulink software returns an instance of this class when a MATLAB program, e.g., a Level-2 MATLAB S-function, invokes the “OutputPort” on page 7-177 method of a block’s run-time object after the model containing the block has been compiled.
Simulink.BlockPortData
None
|
Name |
Description |
|
|
“Reusable” |
Specifies whether an output port’s memory |
|
|
|
is reusable. |
|
|
|
|
|
Reusable
Description
Specifies whether an output port’s memory is reusable. Options are:
NotReusableAndGlobal and ReusableAndLocal.
Data Type string
Access
RW for MATLAB S functions, RO for other blocks.
7-22

Simulink.BlockData
Purpose
Description
Parent
Children
Property
Summary
Provide run-time information about block-related data, such as block parameters
This class defines properties that are common to objects that provide run-time information about a block’s ports and work vectors.
None
Simulink.BlockPortData, Simulink.BlockCompDworkData
|
Name |
Description |
|
|
“AliasedThroughDataType” |
Fundamental base data type. |
|
|
on page 7-24 |
|
|
|
“AliasedThroughDataType- |
Fundamental base data type ID. |
|
|
ID” on page 7-25 |
|
|
|
“Complexity” |
Numeric type (real or complex) of the |
|
|
|
block data. |
|
|
“Data” |
The block data. |
|
|
“DataAsDouble” |
The block data in double form. |
|
|
“Datatype” |
Data type of the block data. |
|
|
“DatatypeID” |
Index of the data type of the block |
|
|
|
data. |
|
|
“Dimensions” |
Dimensions of the block data. |
|
|
“Name” |
Name of the block data. |
|
|
“Type” |
Type of block data (e.g., a parameter). |
|
|
|
|
|
7-23

Simulink.BlockData
Properties
AliasedThroughDataType
Description
Data type aliases allow a data type (B) to be recursively aliased to another alias type or BaseType (A). If alias type A is aliased to another alias type that is aliased to another alias type and so forth, this property allows the alias type to be iteratively searched (aliased through) until the type is no longer an alias type and that final result is the value of the property returned. For example, assume that you have created the Simulink Alias types A and B as follows:
A=Simulink.AliasType('double')
A=
Simulink.AliasType Description: ''
HeaderFile: '' BaseType: 'double'
B=Simulink.AliasType('A')
B=
Simulink.AliasType
Description: ''
HeaderFile: ''
BaseType: 'A'
If the data type of an item of block data is B, this property returns the base type A instead of B.
Data Type string
Access
RO
7-24
Simulink.BlockData
AliasedThroughDataTypeID
Description
Index of the data type alias returned by the AliasedThroughDataType property.
Data Type integer
Access
RO
Complexity
Description
Numeric type (real or complex) of the block data.
Data Type string
Access
RW for MATLAB S functions, RO for other blocks.
Data
Description
The block data.
Data Type
The data type specified by the “Datatype” or “DatatypeID” properties of this object.
Access
RW
7-25

Simulink.BlockData
DataAsDouble
Description
The block data’s in double form.
Data Type double
Access
RO
Datatype
Description
Data type of the values of the block-related object.
Data Type string
Access
RO
DatatypeID
Description
Index of the data type of the values of the block-related object. enter the numeric value for the desired data type, as follows:
Data Type |
Value |
'inherited' |
-1 |
'double' |
0 |
'single' |
1 |
'int8' |
2 |
'uint8' |
3 |
'int16' |
4 |
'uint16' |
5 |
|
|
7-26

Simulink.BlockData
Data Type |
Value |
'int32' |
6 |
'uint32' |
7 |
'boolean' or fixed-point data types |
8 |
|
|
Data Type integer
Access
RW for MATLAB S functions, RO for other blocks
Dimensions
Description
Dimensions of the block-related object, e.g., parameter or DWork vector.
Data Type array
Access
RW for MATLAB S functions, RO for other blocks
Name
Description
Name of block-related object, e.g., a block parameter or DWork vector.
Data Type string
Access
RW for MATLAB S functions, RO for other blocks
Type
Description
Type of block data. Possible values are:
7-27

Simulink.BlockData
|
Type |
Description |
|
|
'BlockPreCompInputPortData' |
This object contains data for an |
|
|
|
input port before the model is |
|
|
|
compiled. |
|
|
'BlockPreCompOutputPortData' |
This object contains data for an |
|
|
|
output port before the model is |
|
|
|
compiled. |
|
|
'BlockCompInputPortData' |
This object contains data for an |
|
|
|
input port after the model is |
|
|
|
compiled. |
|
|
'BlockCompOutputPortData' |
This object contains data for an |
|
|
|
output port after the model is |
|
|
|
compiled. |
|
|
'BlockPreCompDworkData' |
This object contains data for a |
|
|
|
DWork vector before the model is |
|
|
|
compiled. |
|
|
'BlockCompDworkData' |
This object contains data for a |
|
|
|
DWork vector after the model is |
|
|
|
compiled. |
|
|
'BlockDialogPrmData' |
This object describes a dialog box |
|
|
|
parameter of a Level-2 MATLAB |
|
|
|
S-function. |
|
|
'BlockRuntimePrmData' |
This object describes a run-time |
|
|
|
parameter of a Level-2 MATLAB |
|
|
|
S-function. |
|
|
'BlockCompContStatesData' |
This object describes the |
|
|
|
continuous states of the block at |
|
|
|
the current time step. |
|
|
'BlockDerivativesData' |
This object describes the |
|
|
|
derivatives of the block’s |
|
|
|
continuous states at the current |
|
|
|
time step. |
|
7-28

Simulink.BlockData
Data Type string
Access
RO
7-29

Simulink.BlockPath
Purpose
Description
Property
Summary
Method
Summary
Fully specified Simulink block path
A Simulink.BlockPath object represents a fully specified block path that uniquely identifies a block within a model hierarchy, including model reference hierarchies that involve multiple instances of a referenced model. Simulink uses block path objects in a variety of contexts. For example, when you specify Normal mode visibility, Simulink uses block path objects to identify the models with Normal mode visibility (for details, see “Set Normal Mode Visibility”.
The Simulink.BlockPath class is very similar to the
Simulink.SimulationData.BlockPath class.
You must have Simulink installed to use the Simulink.BlockPath class. However, you do not have to have Simulink installed to use the Simulink.SimulationDataBlockPath class. For Simulink environments, consider using Simulink.BlockPath instead of
Simulink.SimulationData.BlockPath. The Simulink.BlockPath class includes a method for checking the validity of block path objects, without you having to update the model diagram.
|
Name |
|
Description |
|
|
SubPath |
|
Individual component within the block |
|
|
|
|
specified by the block path |
|
|
|
|
|
|
|
Name |
Description |
|
|
|
BlockPath |
Create a block path. |
|
|
|
convertToCell |
Convert a block path to a cell array of strings. |
|
|
|
getBlock |
Get a single block path in the model reference |
|
|
|
|
hierarchy. |
|
|
|
getLength |
Get the length of the block path. |
|
|
|
validate |
Determine whether the block path represents |
|
|
|
|
a valid block hierarchy. |
|
|
7-30

Simulink.BlockPath
Properties
SubPath
Description
Represents an individual component within the block specified by the block path.
For example, if the block path refers to a Stateflow chart, you can use SubPath to indicate the chart signals. For example:
Block Path:
'sf_car/shift_logic'
SubPath:
'gear_state.first'
Data Type string
Access
RW
Methods
BlockPath
Purpose
Create block path
Syntax blockpath_object blockpath_object blockpath_object blockpath_object
=Simulink.BlockPath()
=Simulink.BlockPath(blockpath)
=Simulink.BlockPath(paths)
=Simulink.BlockPath(paths, subpath)
Input Arguments
blockpath
Block path object that you want to copy.
paths
A string or cell array of strings that Simulink uses to build the block path.
7-31

Simulink.BlockPath
Specify each string in order, from the top model to the specific block for which you are creating a block path.
Each string must be a path to a block within the Simulink model. The block must be:
•A block in a single model
•A Model block (except for the last string, which may be a block other than a Model block)
•A block that is in a model that is referenced by a Model block that is specified in the previous string
When you create a block path for specifying Normal mode visibility:
•The first string must represent a block that is in the top model in the model reference hierarchy.
•Strings must represent Model blocks that are in Normal mode.
•Strings that represent variant models or variant subsystems must refer to an active variant.
You can use gcb in the cell array to specify the currently selected block.
subpath
String that represents an individual component within a block.
Output Arguments
blockpath_object
Block path that you create.
Description
blockpath_object = Simulink.BlockPath() creates an empty block path.
7-32

Simulink.BlockPath
blockpath_object = Simulink.BlockPath(blockpath) creates a copy of the block path of the block path object that you specify with the source_blockpath argument.
blockpath = Simulink.BlockPath(paths) creates a block path from the cell array of strings that you specify with the paths argument. Each string represents a path at a level of model hierarchy. Simulink builds the full block path based on the strings.
blockpath = Simulink.BlockPath(paths, subpath) creates a block path from the string or cell array of strings that you specify with the paths argument and creates a path for the individual component (for example, a signal) of the block.
Example
Create a block path object called bp1, using gcb to get the current block.
sldemo_mdlref_depgraph
bp1 = Simulink.BlockPath(gcb)
The resulting block path is the top-level Model block called thermostat (the top-left Model block.
bp1 =
Simulink.BlockPath
Package: Simulink
Block Path:
'sldemo_mdlref_depgraph/thermostat'
Create a block path object called bp2, using a cell array of strings representing elements of the block path.
sldemo_mdlref_depgraph
bp2 = Simulink.BlockPath({'sldemo_mdlref_depgraph/thermostat', ...
'sldemo_mdlref_heater/Fahrenheit to Celsius', ...
'sldemo_mdlref_F2C/Gain1'})
7-33
Simulink.BlockPath
The resulting block path reflects the model reference hierarchy for the block path
bp2 =
Simulink.BlockPath
Package: Simulink
Block Path: 'sldemo_mdlref_depgraph/thermostat'
'sldemo_mdlref_heater/Fahrenheit to Celsius' 'sldemo_mdlref_F2C/Gain1'
convertToCell
Purpose
Convert block path to cell array of strings
Syntax
cellarray = Simulink.BlockPath.convertToCell()
Output Arguments
cellarray
Cell array of strings representing elements of block path.
Description
cellarray = Simulink.BlockPath.convertToCell() converts a block path to a cell array of strings.
Examples
sldemo_mdlref_depgraph
bp2 = Simulink.BlockPath({'sldemo_mdlref_depgraph/thermostat', ...
'sldemo_mdlref_heater/Fahrenheit to Celsius', ...
'sldemo_mdlref_F2C/Gain1'})
cellarray_for_bp2 = bp2.convertToCell()
The result is a cell array representing the elements of the block path.
cellarray_for_bp2 =
7-34
Simulink.BlockPath
'sldemo_mdlref_depgraph/thermostat' 'sldemo_mdlref_heater/Fahrenheit to Celsius' 'sldemo_mdlref_F2C/Gain1'
getBlock
Purpose
Get block path in model reference hierarchy
Syntax
block = Simulink.BlockPath.getBlock(index)
Input Arguments
index
The index of the block for which you want to get the block path. The index reflects the level in the model reference hierarchy. An index of 1 represents a block in the top-level model, an index of 2 represents a block in a model referenced by the block of index 1, and an index of n represents a block that the block with index n-1 references.
Output Arguments
block
The block representing the level in the model reference hierarchy specified by the index argument.
Description
blockpath = Simulink.BlockPath.getBlock(index) returns the block path of the block specified by the index argument.
Example
Get the block for the second level in the model reference hierarchy.
sldemo_mdlref_depgraph
bp2 = Simulink.BlockPath({'sldemo_mdlref_depgraph/thermostat', ...
'sldemo_mdlref_heater/Fahrenheit to Celsius', ...
'sldemo_mdlref_F2C/Gain1'})
7-35

Simulink.BlockPath
blockpath = bp2.getBlock(2)
The result is the thermostat block, which is at the second level in the block path hierarchy.
blockpath =
sldemo_mdlref_heater/Fahrenheit to Celsius
getLength
Purpose
Get length of block path
Syntax
length = Simulink.BlockPath.getLength()
Output Arguments
length
The length of the block path. The length is the number of levels in the model reference hierarchy.
Description
length = Simulink.BlockPath.getLength() returns a numeric value that corresponds to the number of levels in the model reference hierarchy for the block path.
Example
Get the length of block path bp2.
sldemo_mdlref_depgraph
bp2 = Simulink.BlockPath({'sldemo_mdlref_depgraph/thermostat', ...
'sldemo_mdlref_heater/Fahrenheit to Celsius', ...
'sldemo_mdlref_F2C/Gain1'})
length_bp2 = bp2.getLength()
The result reflects that the block path has three elements.
length_bp2 =
7-36

Simulink.BlockPath
3
validate
Purpose
Determine whether block path represents valid block hierarchy
Syntax
Simulink.BlockPath.validate()
Simulink.BlockPath.validate(AllowInactiveVariant)
Input Arguments
AllowInactiveVariant
Set to true to include inactive variants in the validity checking.
The default is false.
Description
Simulink.BlockPath.validate() determines whether the block path represents a valid block hierarchy. If there are any validity issues, messages appear in the MATLAB command window. The method checks that:
•All elements in the block path represent valid blocks.
•All variant elements are active.
•Each element except for the last element:
-
-
Is a valid Model block
References the model of the next element
Simulink.BlockPath.validate(AllowInactiveVariant) Specifying true causes the validity checking to consider inactive variants as being valid, if they meet the other validity checks described above. Omitting the AllowInactiveVariant argument or specifying its default value of false causes the method to check only the active variant.
Example
Validate the block paths, checking only the active variant. This validation fails, because the block path actually references model
7-37

Simulink.BlockPath
|
sldemo_mrv_nonlinear_controller, while bp specifies that the block |
|
references model sldemo_mdlref_second_order_controller, which |
|
is in an inactive variant. |
|
sldemo_mdlref_variants |
|
bp = Simulink.BlockPath({'sldemo_mdlref_variants/Controller', ... |
|
'sldemo_mrv_second_order_controller/sensor1'}) |
|
bp.validate() |
|
Validate by checking all variants. The block path passes the validation |
|
when inactive variants are also checked. |
|
bp.validate(true) |
See Also |
Simulink.SimulationData.BlockPath | |
|
Simulink.SimulationData.Dataset |
How To |
• “Specify the Instance That Has Normal Mode Visibility” |
7-38

Simulink.BlockPortData
Purpose
Description
Parent
Children
Property
Summary
Properties
Describe block input or output port
This class defines properties that are common to objects that provide run-time information about a block’s ports.
Simulink.BlockData
Simulink.BlockPreCompInputPortData,
Simulink.BlockPreCompOutputPortData,
Simulink.BlockCompInputPortData,
Simulink.BlockCompOutputPortData
|
Name |
Description |
|
|
“IsBus” |
True if this port is connected to a bus. |
|
|
“IsSampleHit” |
True if this port produces output or |
|
|
|
accepts input at the current simulation |
|
|
|
time step. |
|
|
“SampleTime” |
Sample time of this port. |
|
|
“SampleTimeIndex” |
Sample time index of this port. |
|
|
“SamplingMode” |
Sampling mode of the port. |
|
|
|
|
|
IsBus
Description
True if this port is connected to a bus.
Data Type
Boolean
Access
RO
7-39

Simulink.BlockPortData
IsSampleHit
Description
True if this port produces output or accepts input at the current simulation time step.
Data Type
Boolean
Access
RO
SampleTime
Description
Sample time of this port.
Data Type
[period offset] where period and offset are values of type double. See “Specify Sample Time” for more information.
Access
RW for MATLAB S functions, RO for other blocks
SampleTimeIndex
Description
Sample time index of this port.
Data Type integer
Access
RO
SamplingMode
Description
Sampling mode of the port. Valid values are:
7-40

Simulink.BlockPortData
|
Value |
Description |
|
|
'frame' |
Port accepts or outputs frame-based |
|
|
|
signals. The use of frame-based signals |
|
|
|
requires a DSP System Toolbox license. |
|
|
'inherited' |
Sampling mode is inherited from the port |
|
|
|
to which this port is connected. |
|
|
'sample' |
Port accepts or outputs sampled data. |
|
|
Data Type |
|
|
|
string |
|
|
Access
RW for MATLAB S functions, RO for other blocks
7-41

Simulink.BlockPreCompInputPortData
Purpose
Description
Parent
Children
Property
Summary
Properties
Provide precompilation information about block input port
Simulink software returns an instance of this class when a MATLAB program, e.g., a Level-2 MATLAB S-function, invokes the “InputPort” on page 7-176 method of a block’s run-time object before the model containing the block has been compiled.
Simulink.BlockPortData
None
|
Name |
Description |
|
|
“DirectFeedthrough” |
True if this port has direct feedthrough. |
|
|
“Overwritable” |
True if this port is overwritable. |
|
|
|
|
|
DirectFeedthrough
Description
True if this input port has direct feedthrough.
Data Type
Boolean
Access
RW for MATLAB S functions, RO for other blocks
Overwritable
Description
True if this input port is overwritable.
Data Type
Boolean
Access
RW for MATLAB S functions, RO for other blocks
7-42

Simulink.BlockPreCompOutputPortData
Purpose
Description
Parent
Children
Property
Summary
Properties
Provide precompilation information about block output port
Simulink software returns an instance of this class when a MATLAB program, e.g., a Level-2 MATLAB S-function, invokes the “OutputPort” on page 7-177 method of a block’s run-time object before the model containing the block has been compiled.
Simulink.BlockPortData
none
|
Name |
Description |
|
|
“Reusable” |
Specifies whether an output port’s memory is |
|
|
|
reusable. |
|
|
|
|
|
Reusable
Description
Specifies whether an output port’s memory is reusable. Options are:
NotReusableAndGlobal and ReusableAndLocal.
Data Type string
Access
RW for MATLAB S functions, RO for other blocks
7-43

Simulink.Bus
Purpose |
Specify properties of signal bus |
Description Objects of this class (in conjunction with objects of the Simulink.BusElement class) specify the properties of a signal bus. Use bus objects to enable Simulink software to validate the properties of buses connected to the inputs of blocks in your model. You do this by entering, in the Data type parameter of a block parameter dialog box, the name of a bus object that defines a bus. When you update the model diagram or start a simulation of the model, Simulink checks whether the buses connected to the blocks have the properties specified by the bus objects. If not, Simulink halts and displays an error message.
The blocks that support using a bus object as a data type are:
•Bus Creator
•Constant
•Data Store Memory
•Data Store Read
•Data Store Write
•Inport
•Outport
•Signal Specification
You can use the Model Explorer Add > Simulink Bus command (see “Using the Model Explorer to Create Data Objects”), the Simulink Bus editor (see “Manage Bus Objects with the Bus Editor”), or MATLAB commands (see “Data Objects”) to create bus objects in the base MATLAB workspace. You must use the Bus editor or the MATLAB command line to set the properties of a bus object. Simulink also provides a set of utility functions for creating and saving bus objects.
To view bus object properties:
1 Open the Model Explorer.
7-44
Simulink.Bus
2In the Model Hierarchy pane, select the Base Workspace node.
3In the Contents pane, select the bus object. In the Property dialog box appears.
Property
Dialog
Box
7-45

Simulink.Bus
Bus elements
Table that displays the properties of the bus elements. You cannot edit this table. You must use either the Simulink Bus editor (see “Bus Objects”) or MATLAB commands to add or delete bus elements or change the properties of existing bus elements. To launch the bus editor, click the Launch Bus editor button at the bottom of this dialog box or in the Simulink Editor, select
Edit > Bus EditorBus editor.
Data scope
Specifies whether the data type definition should be imported from, or exported to, a header file during code generation. The possible values are:
|
Value |
Action |
|
|
Auto (default) |
If no value is specified for Header file, export |
|
|
|
the data type definition to model_types.h, |
|
|
|
where model is the model name. |
|
|
|
If a value is specified for Header file, import |
|
|
|
the data type definition from the specified |
|
|
|
header file. |
|
|
Exported |
Export the data type definition to a header |
|
|
|
file, which can be specified in the Header |
|
|
|
file field. If no value is specified for Header |
|
|
|
file, the header file name defaults to type.h, |
|
|
|
wheretype is the data type name. |
|
|
Imported |
Import the data type definition from a header |
|
|
|
file, which can be specified in the Header |
|
|
|
file field. If no value is specified for Header |
|
|
|
file, the header file name defaults to type.h, |
|
|
|
wheretype is the data type name. |
|
Header file
Name of a C header file from which a data type definition is imported, or to which a data type definition is exported, based
7-46

Simulink.Bus
Properties
on the value of Data scope. This field is intended for use by Simulink Coder software. See “Generate Code Including
User-Defined Data Types”. Simulink software ignores this field.
Alignment
Data alignment boundary, specified in number of bytes. The starting memory address for the data allocated for the bus will be a multiple of the Alignment setting. The default value is -1, which specifies that the code generator should determine an optimal alignment based on usage. Otherwise, specify a positive integer that is a power of 2, not exceeding 128. This field is
intended for use by Simulink Coder software. See “Configure Data Alignment for Function Implementations”. Simulink software ignores this field.
Description
Description of this structure. This field is intended for you to use to document this bus. Simulink software does not use this field.
|
Name |
Access |
Description |
|
|
Alignment |
RW |
Integer value specifying a data |
|
|
|
|
alignment boundary, in number of |
|
|
|
|
bytes. This property is intended for |
|
|
|
|
use by Simulink Coder software. |
|
|
|
|
Simulink software does not use it. |
|
|
|
|
(Alignment) |
|
|
DataScope |
RW |
A string specifying whether the data |
|
|
|
|
type definition should be imported |
|
|
|
|
from, or exported to, a header file |
|
|
|
|
during code generation. (Data scope) |
|
|
Description |
RW |
A string that describes this bus. This |
|
|
|
|
property is intended for user use. |
|
|
|
|
Simulink software does not use it. |
|
|
|
|
(Description) |
|
7-47

Simulink.Bus
|
|
Name |
Access |
Description |
|
|
|
Elements |
RW |
An array of Simulink.BusElement |
|
|
|
|
|
objects that define the names, |
|
|
|
|
|
data types, dimensions, and other |
|
|
|
|
|
properties of the bus’s elements. The |
|
|
|
|
|
elements must have unique names |
|
|
|
|
|
(see “Choosing a Signal Name”). (Bus |
|
|
|
|
|
elements) |
|
|
|
HeaderFile |
RW |
A string that specifies the name of a |
|
|
|
|
|
C header file from which a data type |
|
|
|
|
|
definition is imported, or to which |
|
|
|
|
|
a data type definition is exported, |
|
|
|
|
|
during code generation. This property |
|
|
|
|
|
is intended for use by Simulink Coder |
|
|
|
|
|
software. Simulink software does not |
|
|
|
|
|
use it. (Header file) |
|
See Also |
“Composite Signals”, Bus Assignment, Bus Creator, Bus Selector, |
|
|||
|
|
Bus to Vector, Constant, Inport, Outport, Signal Specification, |
|
||
|
|
Simulink.Bus.cellToObject, |
Simulink.Bus.createMATLABStruct, |
|
|
|
|
Simulink.Bus.createObject, |
Simulink.BusElement, |
|
|
|
|
Simulink.Bus.objectToCell, Simulink.Bus.save |
|
||
7-48

Simulink.BusElement
Purpose |
Describe element of signal bus |
Description Objects of this class define elements of buses defined by objects of the
Simulink.Bus class.
Property
Dialog
Box
Name
Name of this element. See “Signal Names” for guidelines for signal names.
Data Type: string
Access: RW
DataType
Name of the data type of this element. The value of this field can be a:
• Built-in Simulink data type (for example, double or uint8)
7-49

Simulink.BusElement
•Simulink.NumericType object, with one exception. The exception is a Simulink.NumericType whose Category is Fixed-point: unspecified scaling.
Note Fixed-point: unspecified scaling is a partially specified type whose definition is completed by the block that uses the Simulink.NumericType. Forbidding its use for bus elements avoids creating bus elements that have different data types depending on where they are used.
•Simulink.Bus object, using the Bus: <object name> option. This allows you to create bus objects that specify hierarchical buses (that is, buses that contain other buses).
Click the Show data type assistant button  to display the Data Type Assistant, which helps you set the Data type parameter. (See “Specify Data Types Using Data Type Assistant”.)
to display the Data Type Assistant, which helps you set the Data type parameter. (See “Specify Data Types Using Data Type Assistant”.)
Data Type: string
Access: RW
Dimensions
A vector specifying the dimensions of this element.
Data Type: array.
Access: RW
Complexity
Numeric type (real or complex) of this element. Must be real if this bus element is itself a bus.
Data Type: string
Access: RW
7-50

Simulink.BusElement
SampleTime
Size of the interval between times when this signal value must be recomputed. Must be -1 (inherited) if this bus element is itself a bus or if the bus that includes this element passes through a block that changes the bus’s sample time, such as a Rate Transition block. See “Specify Sample Time” for more information.
Data Type: double
Access: RW
Min
The minimum value of this element. This value must be a finite real double scalar. This value must be empty [] if this element is itself a bus.
Data Type: double
Access: RW
Max
The maximum value of this element. This value must be a finite real double scalar. This value must be empty [] if this element is itself a bus.
Data Type: double
Access: RW
SamplingMode
Sampling mode of this element. Must be sample-based if this element is itself a bus. This field is intended to be used by applications based on Simulink models.
Data Type: string
Access: RW
7-51

Simulink.BusElement
|
DimensionsMode |
|
A field that specifies if the size (the number of elements in a dimension) |
|
of this element may vary or remain fixed during simulation. This field |
|
can have the following values: |
|
• Fixed: The size of the element may not change during simulation. |
|
• Variable: The size of the element may change during simulation. |
|
See “Variable-Size Signal Basics” for more information. |
|
Data Type: string |
|
Access: RW |
See Also |
“Composite Signals”, Bus Assignment, Bus Creator, Bus Selector, |
|
Bus to Vector, Simulink.Bus, Simulink.Bus.cellToObject, |
|
Simulink.Bus.createObject, Simulink.Bus.objectToCell, |
|
Simulink.Bus.save |
7-52

Simulink.ConfigSet
Purpose
Description
Property
Summary
Access model configuration set
Instances of this handle class allow you to write programs to create, modify, and attach configuration sets to models. See “Manage a Configuration Set” and “Overview” for more information.
|
Name |
Description |
|
|
“Components” |
Components of the configuration set. |
|
|
“Description” |
Description of the configuration set. |
|
|
“Name” |
Name of the configuration set. |
|
|
|
|
|
Method
Summary
Note You can use the Model Configuration dialog box to set the Name and Description properties of a configuration set. See “Model Configuration Pane” for more information.
|
Name |
Description |
|
|
“attachComponent” |
Attach a component to a configuration set. |
|
|
“copy” |
Create a copy of a configuration set. |
|
|
“getComponent” |
Get a component of a configuration set. |
|
|
“getFullName” |
Get the full path of a configuration set. |
|
|
“getModel” |
Get the handle of the model that owns a |
|
|
|
configuration set. |
|
|
“get_param” |
Get the value of a configuration set parameter. |
|
|
“isActive” |
Determine whether a configuration set is the |
|
|
|
active set of the model that owns it. |
|
|
“isValidParam” |
Determine whether a specified parameter is a |
|
|
|
valid parameter of a configuration set. |
|
7-53

Simulink.ConfigSet
|
Name |
Description |
|
|
“saveAs” |
Save a configuration set to a MATLAB file. |
|
|
“setPropEnabled” |
Prevent or allow a user to change a parameter. |
|
|
“set_param” |
Set the value of a configuration set parameter. |
|
|
|
|
|
Properties
Components
Description
Array of Simulink.ConfigComponent objects representing the components of the configuration set. For example, solver parameters and data import/export parameters.
Data Type array
Access
RW
Description
Description
Description of the configuration set. You can use this property to provide additional information about a configuration set, such as its purpose. This field can remain blank.
Data Type
string
Access
RW
Name
Description
Name of the configuration set. This name represents the configuration set in the Model explorer.
7-54
Simulink.ConfigSet
Data Type string
Access
RW
Methods
attachComponent
Purpose
Attach a component to this configuration set.
Syntax attachComponent(component)
Arguments
component
Instance of Simulink.ConfigComponent class.
Description
This method replaces a component in this configuration set with a component having the same name.
example
The following example replaces the solver component of the active configuration set of model A with the solver component of the active configuration set of model B.
hCs = getActiveConfigSet('B'); hSolverConfig = hCs.getComponent('Solver'); hSolverConfig = hSolverConfig.copy;
hCs = getActiveConfigSet('A'); hCs.attachComponent(hSolverConfig);
copy
Purpose
Create a copy of this configuration set.
Syntax copy
7-55

Simulink.ConfigSet
Description
This method creates a copy of this configuration set.
Note You must use this method to create copies of configuration sets because Simulink.ConfigSet is a handle class. See “Handle Versus Value Classes” for more information.
getComponent
Purpose
Get a component of this configuration set.
Syntax
getComponent(componentName)
Arguments
componentName
String specifying the name of the component to be returned.
Description
Returns the specified component. Omit the argument to get a list of the names of the components that this configuration set contains.
Example
The following code gets the solver component of the active configuration set of the currently selected model.
hCs = getActiveConfigSet(gcs); hSolverConfig = hCs.getComponent('Solver');
The following code displays the names of the components of the currently selected active configuration set of the model at the MATLAB command line.
hCs = getActiveConfigSet(gcs); hCs.getComponent
7-56

Simulink.ConfigSet
getFullName
Purpose
Get the full path of a configuration set.
Syntax
getFullName
Description
This method returns a string specifying the full path of a configuration set, for example, 'vdp/Configuration'.
getModel
Purpose
Get the model that owns this configuration set.
Syntax
getModel
Description
Returns a handle to the model that owns this configuration set.
Example
The following command opens the block diagram of the model that owns the configuration set referenced by the MATLAB workspace variable
hCs.
open_system(hCs.getModel);
get_param
Purpose
Get the value of a configuration set parameter.
Syntax
get_param(paramName)
7-57

Simulink.ConfigSet
Arguments
paramName
String specifying the name of the parameter whose value is to be returned.
Description
This method returns the value of the specified parameter. Specifying paramName as 'ObjectParameters' returns the names of the valid parameters in the configuration set.
Example
The following command gets the name of the solver used by the selected active configuration of the model.
hAcs = getActiveConfigSet(bdroot); hAcs.get_param('SolverName');
Note You can also use the get_param model construction command to get the values of parameters of an active configuration set of a model. For example, get_param(bdroot, 'SolverName') gets the solver name of the currently selected model.
isActive
Purpose
Determine whether configuration set is the active configuration set for the model.
Syntax
isActive
Description
Returns true if this configuration set is the active configuration set of the model that owns this configuration set.
7-58

Simulink.ConfigSet
isValidParam
Purpose
Determine whether a specified parameter is a valid parameter of this configuration set. A parameter is valid if it is compatible with other parameters in the configuration set. For example, if SolverType is
'variable-step', FixedStep is an invalid parameter.
Syntax
isValidParam(paramName)
Arguments
paramName
String specifying the name of the parameter whose validity is to be determined.
Description
This method returns true if the specified parameter is a valid parameter of this configuration set; otherwise, it returns false.
Example
The following code sets the parameter StopTime only if it is a valid parameter of the currently selected active configuration set.
hAcs = getActiveConfigSet(gcs); if hAcs.isValidParam('StopTime')
set_param('StopTime', '20'); end
saveAs
Purpose
Save configuration set to MATLAB file
Syntax
saveAs(fileName)
saveAs(fileName, 'paramName', paramValue)
7-59

Simulink.ConfigSet
Arguments
fileName
String specifying the name of the MATLAB file that the method creates.
paramName, paramValue
Parameter name and value pairs that you optionally use to format the MATLAB file.
|
Name |
Value |
|
|
'-format' |
• 'MATLAB function' |
|
|
|
(default) — Creates a |
|
|
|
MATLAB function. |
|
|
|
• 'MATLAB script' — |
|
|
|
Creates a MATLAB script. |
|
|
'-comments' |
• 'on' (default) — The |
|
|
|
MATLAB file: |
|
|
|
— Includes the GUI name |
|
|
|
of the parameter as a |
|
|
|
comment to help identify |
|
|
|
the parameters. |
|
|
|
— Groups the parameters |
|
|
|
by the pane in |
|
|
|
the Configuration |
|
|
|
Parameters dialog box on |
|
|
|
which they are displayed. |
|
|
|
• 'off' — Does not include |
|
|
|
comments in the MATLAB |
|
|
|
file, so that the file |
|
|
|
generates faster. |
|
|
'-varname' |
'variable' — Any valid |
|
|
|
variable name. If you do not |
|
|
|
specify this parameter, the |
|
|
|
|
|
7-60

Simulink.ConfigSet
Name |
Value |
|
|
MATLAB script uses cs for the variable.
When you specify '-format', 'MATLAB script', use
'-varname', 'variable' to specify the variable that the script uses for the configuration set object.
When you run the script, the script creates the variable in the base workspace.
Description
saveAs(fileName) saves a configuration set to a MATLAB file. Before saving, you must get a handle to the configuration set. Use fileName to specify the file name.
saveAs(fileName, 'paramName', paramValue) accepts one or more comma-separated parameter name and value pairs. For the valid parameter name and value pairs, see the previous arguments section.
Example
The following code gets the configuration set for sldemo_counters and creates a function called ConfiguredDataFunction.
%Get the active configuration set from sldemo_counters. hCs = getActiveConfigSet('sldemo_counters');
%Save the configuration set as a function. hCs.saveAs('ConfiguredDataFunction');
The following code gets the configuration set for sldemo_counters and creates a script called ConfiguredDataScript. The script uses config_set for the variable name.
% Get the active configuration set from sldemo_counters.
hCs = getActiveConfigSet('sldemo_counters');
7-61

Simulink.ConfigSet
% Save the configuration set as a script.
hCs.saveAs('ConfiguredDataScript', '-format', 'MATLAB script', '-varname', 'config_set');
See Also
getActiveConfigSet, getConfigSet
setPropEnabled
Purpose
Enable a configuration set parameter to be changed.
Syntax
setPropEnabled(paramName, isenabled)
Arguments
paramName
Name of the parameter whose value is to be set.
isenabled
Specify as true to enable parameter; as false, to disable the parameter.
Description
This method sets the enabled status the parameter specified by paramName to the value specified by isenabled. Disabling a parameter prevents the user from changing it.
Example
The following code prevents the user from setting the simulation stop time of the currently selected model.
hAcs = getActiveConfigSet(gcs); hAcs.setPropEnabled('StopTime', false);
set_param
Purpose
Set the value of a configuration set parameter.
7-62

Simulink.ConfigSet
Syntax
set_param(paramName, paramValue)
Arguments
paramName
Name of the parameter whose value is to be set.
paramValue
Value to assign to the parameter.
|
Description |
|
This method sets the configuration set parameter specified by |
|
paramName to the value specified by paramValue. |
|
Example |
|
The following command sets the simulation stop time of the selected |
|
active configuration set. |
|
hAcs = getActiveConfigSet(gcs); |
|
hAcs.set_param('StopTime', '20'); |
|
|
|
Note You can also use the set_param model construction command |
|
to set the parameters of the active configuration set. For example, |
|
set_param(gcs, 'StopTime', '20') sets the simulation stop time |
|
of the currently selected model. |
See Also |
|
“About Configuration Sets” |
7-63

Simulink.ConfigSetRef
Purpose
Description
Property
Summary
Link model to configuration set stored independently of any model
Instances of this handle class allow a model to reference configuration sets that exist outside any model. See “Manage a Configuration Set”, “Overview”, and “Manage a Configuration Reference” for more information.
|
Name |
Description |
|
|
“Description” |
Description of the configuration reference. |
|
|
“Name” |
Name of the configuration reference. |
|
|
“WSVarName” |
Name of the workspace variable that |
|
|
|
contains the referenced configuration set. |
|
Method
Summary
Note You can use the Configuration Reference dialog box to set the Name, Description, and WSVarName properties of a configuration reference. See “Create and Attach a Configuration Reference” for details.
|
Name |
Description |
|
|
“copy” |
Create a copy of a configuration reference. |
|
|
“getFullName” |
Get the full pathname of a configuration |
|
|
|
reference. |
|
|
“getModel” |
Get the handle of the model that owns a |
|
|
|
configuration reference. |
|
|
“get_param” |
Get the value of a configuration set parameter |
|
|
|
indirectly through a configuration reference. |
|
|
“getRefConfigSet” |
Get the configuration set specified by a |
|
|
|
configuration reference. |
|
7-64
Simulink.ConfigSetRef
|
Name |
Description |
|
|
“isActive” |
Determine whether a configuration reference |
|
|
|
is the active configuration object of the model. |
|
|
“refresh” |
Update configuration reference after any |
|
|
|
change to properties or configuration set |
|
|
|
availability. |
|
Properties
Description
Description
Description of the configuration reference. You can use this property to provide additional information about a configuration reference, such as its purpose. This field can remain blank.
Data Type
string
Access
RW
Name
Description
Name of the configuration reference. This name represents the configuration reference in the GUI.
Data Type
string
Access
RW
WSVarName
Description
Name of the workspace variable that contains the referenced configuration set.
7-65
Simulink.ConfigSetRef
Data Type
string
Access
RW
Methods
copy
Purpose
Create a copy of this configuration reference.
Syntax
copy
Description
This method creates a copy of this configuration set.
Note You must use this method to create copies of configuration references. This is because Simulink.ConfigSetRef is a handle class. See “Handle Versus Value Classes” for more information.
getFullName
Purpose
Get the full pathname of a configuration reference.
Syntax
getFullName
Description
This method returns a string specifying the full pathname of a configuration reference, e.g., 'vdp/Configuration'.
getModel
Purpose
Get the model that owns this configuration reference.
7-66

Simulink.ConfigSetRef
Syntax
getModel
Description
Returns a handle to the model that owns this configuration reference.
example
The following command opens the block diagram of the model that owns the configuration set referenced by the MATLAB workspace variable
hCr.
open_system(hCr.getModel);
get_param
Purpose
Get the value of a configuration set parameter indirectly through a configuration reference.
Syntax
get_param(paramName)
Arguments
paramName
String specifying the name of the parameter whose value is to be returned.
Description
This method returns the value of the specified parameter from the configuration set to which the configuration reference points. To obtain this value, the method uses the value of WSVarName to retrieve the configuration set, then retrieves the value of paramName from that configuration set. Specifying paramName as 'ObjectParameters' returns the names of all valid parameters in the configuration set. If a valid configuration set is not attached to the configuration reference, the method returns unreliable values.
The inverse method, set_param, is not defined for configuration references. To obtain a parameter value through a configuration reference, you must first use the getRefConfigSet method to retrieve
7-67

Simulink.ConfigSetRef
the configuration set from the reference, then use set_param directly on the configuration set itself.
You can also use the get_param model construction command to get the values of parameters of a model’s active configuration set, e.g., get_param(bdroot, 'SolverName') gets the solver name of the currently selected model.
example
The following command gets the name of the solver used by the selected model’s active configuration.
hAcs = getActiveConfigSet(bdroot); hAcs.get_param('SolverName');
getRefConfigSet
Purpose
Get the configuration set specified by a configuration reference
Syntax
getRefConfigSet
Description
Returns a handle to the configuration set specified by the WSVarName property of a configuration reference.
isActive
Purpose
Determine whether this configuration set is its model’s active configuration set.
Syntax
isActive
Description
Returns true if this configuration set is the active configuration set of the model that owns this configuration set.
7-68

Simulink.ConfigSetRef
refresh
Purpose
Update configuration reference after any change to properties or configuration set availability
Syntax
refresh
Description
Updates a configuration reference after using the API to change any property of the reference, or after providing a configuration set that did not exist at the time the set was originally specified in WSVarName. If you omit executing refresh after any such change, the configuration reference handle will be stale, and using it will give incorrect results.
7-69

Simulink.GlobalDataTransfer
Purpose |
Configure concurrent execution data transfers |
Description The Simulink.GlobalDataTransfer object contains the data transfer information for the concurrent execution of a model. To access the properties of this class, use the get_param function to get the handle for this class, and then use dot notation to access the properties. For example:
dt=get_param(gcs,'DataTransfer'); dt.DefaultTransitionBetweenContTasks
ans =
Ensure deterministic transfer (minimum delay)
Properties DefaultTransitionBetweenSyncTasks
Global setting for data transfer handling option when the source and destination of a signal are in two different and periodic tasks.
Data Type: Enumeration. Can be one of:
•'Ensure data integrity only'
•'Ensure deterministic transfer (maximum delay)'
Access: Read/write
DefaultTransitionBetweenContTasks
Global setting for the data transfer handling option for signals that have a continuous sample time.
Data Type: Enumeration. Can be one of:
•'Ensure data integrity only'
•'Ensure deterministic transfer (maximum delay)'
Access: Read/write
7-70

Simulink.GlobalDataTransfer
DefaultExtrapolationMethodBetweenContTasks
Global setting for the data transfer extrapolation method for signals that have a continuous sample time.
Data Type: Enumeration. Can be one of:
• 'None'
• 'Zero Order Hold'
• 'Linear'
• 'Quadratic'
Access: Read/write
AutoInsertRateTranBlk
|
Setting for the extrapolation method of data transfer to configure |
|
continuous-to-continuous task transitions. |
|
Data Type: Boolean. Can be one of: |
|
• 0 |
|
• 1 |
|
Access: Read/write |
Copy |
Handle. To learn how handle classes affect copy operations, see Copying |
Semantics |
Objects in the MATLAB Programming Fundamentals documentation. |
Examples |
Access the properties of this class. |
|
dt=get_param(gcs,'DataTransfer'); |
|
dt.DefaultTransitionBetweenContTasks |
|
ans = |
|
Ensure deterministic transfer (minimum delay) |
7-71

Simulink.GlobalDataTransfer
Alternatives
See Also
How To
“Customize Concurrent Execution Settings”
Simulink.SoftwareTarget.TaskConfiguration
• “Configuring Data Transfer Communications”
7-72

Simulink.MDLInfo
Purpose |
Extract model file information without loading block diagram into |
|
memory |
Description |
The class Simulink.MDLInfo extracts information from a model file |
|
without loading the block diagram into memory. |
|
You can create an MdlInfo object containing all the model information |
|
properties, or you can use the static methods for convenient access to |
|
individual properties without creating the class first. For example, |
|
to get the description only: |
|
description = Simulink.MDLInfo.getDescription('mymodel') |
|
To get the metadata only: |
|
metadata = Simulink.MDLInfo.getMetadata('mymodel') |
|
All model information properties are read only. |
Construction |
info = Simulink.MDLInfo('mymodel') creates an instance of the |
|
MdlInfo class info and populates the properties with the information |
|
from the model file 'mymodel'. |
|
mymodel can be: |
|
• A block diagram name (for example, vdp) |
|
• The file name for a file on the MATLAB path (for example, |
|
mymodel.slx) |
|
• A file name relative to the current folder (for example, |
|
mydir/mymodel.slx) |
|
• A fully qualified file name (for example, C:\mydir\mymodel.slx) |
|
Simulink.MDLInfo resolves the supplied name by looking at files on the |
|
MATLAB path, and ignores any block diagrams in memory. This may |
|
cause unexpected results if you supply the name of a loaded model, but |
|
its file is shadowed by another file on the MATLAB path. If a file is |
7-73

Simulink.MDLInfo
shadowed, you see a warning in the command window. To avoid any confusion, supply a fully-qualified file name to Simulink.MDLInfo.
Properties BlockDiagramName
Name of block diagram.
Description
Description of model.
FileName
Name of model file.
Interface
Names and attributes of the block diagram’s root inports, outports, model references, etc., describing the graphical interface if you created a Model Reference block from this model.
Structure.
IsLibrary
Whether the block diagram is a library.
Metadata
Names and attributes of arbitrary data associated with the model.
Structure. The structure fields can be strings, numeric matrices of type "double", or more structures. Use the method getMetadata to extract this metadata structure without loading the model.
ModelVersion
Model version number.
SimulinkVersion
Version number of Simulink software that was used to save the model file.
7-74
Simulink.MDLInfo
Methods
Copy
Semantics
Examples
getDescription |
Extract file description without |
|
loading block diagram into |
|
memory |
getMetadata |
Extract file metadata without |
|
loading block diagram into |
|
memory |
Handle. To learn how this affects your use of the class, see Copying Objects in the MATLAB Programming Fundamentals documentation.
Construct and view a model information object:
info = Simulink.MDLInfo('mymodel')
%Get the Version when the model was saved simulink_version = info.SimulinkVersion;
%Get model metadata
metadata = info.metadata
To add metadata to a model, create a metadata structure containing the information you require and use set_param to attach it to the model. For example:
metadata.TestStatus = 'untested'; metadata.ExpectedCompletionDate
= '01/01/2011'; load_system(mymodelname); set_param(mymodelname,'Metadata',...
metadata) % must be a struct save_system(mymodelname); close_system(mymodelname);
Construct a model information object for a model named mpowertrain, in order to find the names of referenced models without loading the model into memory:
7-75

Simulink.MDLInfo
info = Simulink.MDLInfo('mpowertrain') % Get the Interface property info.Interface
Output:
ans =
Inports: [0x1 struct] Outports: [0x1 struct] Trigports: [0x1 struct] Connports: [0x1 struct]
ModelVersion: '1.122' ModelReferences: {2x1 cell}
ParameterArgumentNames: '' TestPointedSignals: [0x1 struct]
Get the referenced models:
info.Interface.ModelReferences
Output is in the form model name / block path | referenced model name:
ans =
'mpowertrain/Model Variants|manual_transmission' 'mpowertrain/engine model|menginemodel'
See Also Simulink.MDLInfo.getDescription; Simulink.MDLInfo.getMetadata
7-76

Simulink.MDLInfo.getDescription
Purpose
Syntax
Description
Examples
See Also
Extract model file description without loading block diagram into memory
description = Simulink.MDLInfo.getDescription('mymodel') description = info.getDescription
description = Simulink.MDLInfo.getDescription('mymodel') returns the description associated with the file mymodel, without loading the model.
mymodel can be:
•A block diagram name (for example, vdp)
•The file name for a file on the MATLAB path (for example, mymodel.slx)
•A file name relative to the current folder (for example, mydir/mymodel.slx)
•A fully qualified file name (for example, C:\mydir\mymodel.slx)
description = info.getDescription returns the description property of the Simulink.MDLInfo object info.
Get the description without loading the model or creating a
Simulink.MDLInfo object:
description = Simulink.MDLInfo.getDescription('mymodel')
Create a Simulink.MDLInfo object containing all the model information properties, and get the description property:
info = Simulink.MDLInfo('mymodel') description = info.getDescription
Simulink.MDLInfo; Simulink.MDLInfo.getMetadata
7-77

Simulink.MDLInfo.getMetadata
Purpose |
Extract model file metadata without loading block diagram into memory |
||
Syntax |
metadata |
= |
Simulink.MDLInfo.getMetadata('mymodel') |
|
metadata |
= |
info.getMetadata |
Description metadata = Simulink.MDLInfo.getMetadata('mymodel') extracts the structure metadata associated with the file mymodel, without loading the model.
mymodel can be:
•A block diagram name (for example, vdp)
•The file name for a file on the MATLAB path (for example, mymodel.slx)
•A file name relative to the current folder (for example, mydir/mymodel.slx)
•A fully qualified file name (for example, C:\mydir\mymodel.slx)
metadata = info.getMetadata returns the metadata property of the Simulink.MDLInfo object info.
metadata is a structure containing the names and attributes of arbitrary data associated with the model. The structure fields can be strings, numeric matrices of type "double", or more structures.
To add metadata to a model, create a metadata structure containing the information you require and use set_param to attach it to the model. If it is important to extract the information without loading the model, use metadata instead of adding custom user data with add_param.
Examples Create a metadata structure and use set_param to attach it to the model:
metadata.TestStatus = 'untested'; metadata.ExpectedCompletionDate = '01/01/2011'; load_system('mymodel'); set_param('mymodel','Metadata',metadata) % must be a struct
7-78

Simulink.MDLInfo.getMetadata
save_system('mymodel'); close_system('mymodel');
Get the metadata without loading the model or creating a
Simulink.MDLInfo object:
metadata = Simulink.MDLInfo.getMetadata('mymodel')
Create a Simulink.MDLInfo object containing all the model information properties, and get the metadata property:
info = Simulink.MDLInfo('mymodel') metadata = info.getMetadata
See Also Simulink.MDLInfo; Simulink.MDLInfo.getDescription
7-79

Simulink.ModelAdvisor
Purpose
Description
Run Model Advisor from MATLAB file
Use instances of this class in MATLAB programs to run the Model Advisor, for example, to perform a standard set of checks. MATLAB software creates an instance of this object for each model that you open in the current MATLAB session. To get a handle to a model’s Model Advisor object, execute the following command
ma = Simulink.ModelAdvisor.getModelAdvisor(model);
where model is the name of the model or subsystem that you want to check. Your program can then use the Model Advisor object’s methods to initialize and run the Model Advisor’s checks.
About IDs
Many Simulink.ModelAdvisor object methods require or return IDs. An ID is a string that identifies a Model Advisor check, task, or group. ID must remain constant. A Simulink.ModelAdvisor object includes methods that enable you to retrieve the ID or IDs for all checks, tasks, and groups, checks belonging to groups and tasks, the active check, and selected checks, tasks and groups. See the Simulink.ModelAdvisor “Method Summary” for more information.
You can also determine check IDs as follows:
1In the Model Advisor, select View > Source Tab.
2Navigate to the folder that contains the check.
3In the right pane, click Source. The Model Advisor displays the Title, TitleID, and Source information for each check in the folder.
Syntax
ma = Simulink.ModelAdvisor
7-80

Simulink.ModelAdvisor
Properties
Method
Summary
Arguments
ma
A variable representing the Simulink.ModelAdvisor object you create.
EmitInputParametersToReport
The EmitInputParametersToReport property specifies the display of check input parameters in the Model Advisor report.
|
Value |
Description |
|
|
'true' (default) |
Display check input parameters |
|
|
|
in the Model Advisor report. |
|
|
'false' |
Do not display check input |
|
|
|
parameters in the Model Advisor |
|
|
|
report. |
|
|
Name |
Description |
|
|
“closeReport” |
Close Model Advisor report. |
|
|
“deselectCheck” |
Clear checks. |
|
|
“deselectCheckAll” |
Clear all checks. |
|
|
“deselectCheckForGroup” |
Clear a group of checks. |
|
|
“deselectCheckForTask” |
Clear checks that belong to a |
|
|
|
specified task or set of tasks. |
|
|
“deselectTask” |
Clear tasks. |
|
|
“deselectTaskAll” |
Clear all tasks. |
|
|
“displayReport” |
Display Model Advisor |
|
|
|
report. |
|
7-81

Simulink.ModelAdvisor
|
Name |
Description |
|
|
“exportReport” |
Copy report to a specified |
|
|
|
location. |
|
|
“filterResultWithExclusion” on page |
Filter objects that have been |
|
|
7-89 |
excluded by user-defined |
|
|
|
exclusions. |
|
|
“getBaselineMode” |
Get baseline mode setting for |
|
|
|
the Model Advisor. |
|
|
“getCheckAll” |
Get the IDs of the checks |
|
|
|
performed by the Model |
|
|
|
Advisor. |
|
|
“getCheckForGroup” |
Get checks belonging to a |
|
|
|
check group. |
|
|
“getCheckForTask” |
Get checks belonging to a |
|
|
|
task. |
|
|
|
|
|
|
“getCheckResult” |
Get check results. |
|
|
“getCheckResultData” |
Get check result data. |
|
|
“getCheckResultStatus” |
Get pass/fail status of a check |
|
|
|
or set of checks. |
|
|
“getGroupAll” |
Get the IDs of the groups of |
|
|
|
tasks performed by the Model |
|
|
|
Advisor. |
|
|
“getInputParameters” on page 7-94 |
Get input parameters of a |
|
|
|
check. |
|
|
“getListViewParameters” on page |
Get list view parameters of a |
|
|
7-95 |
check. |
|
|
“getModelAdvisor” |
Get the Model Advisor for a |
|
|
|
model or subsystem. |
|
7-82

Simulink.ModelAdvisor
|
Name |
Description |
|
|
“getSelectedCheck” |
Get selected checks. |
|
|
“getSelectedSystem” on page 7-97 |
Get path of system currently |
|
|
|
targeted by the Model |
|
|
|
Advisor. |
|
|
“getSelectedTask” |
Get selected tasks. |
|
|
“getTaskAll” |
Get the IDs of the tasks |
|
|
|
performed by the Model |
|
|
|
Advisor. |
|
|
“Simulink.ModelAdvisor.openConfigUI” |
Start the Model Advisor |
|
|
on page 7-98 |
Configuration editor. |
|
|
“Simulink.ModelAdvisor.reportexists” |
Determine whether a report |
|
|
|
exists for a system or |
|
|
|
subsystem. |
|
|
“runCheck” |
Run selected checks. |
|
|
“runTask” |
Run checks for selected tasks. |
|
|
“selectCheck” |
Select checks. |
|
|
“selectCheckAll” |
Select all checks. |
|
|
“selectCheckForGroup” |
Select a group of checks. |
|
|
“selectCheckForTask” |
Select checks that belong to a |
|
|
|
specified task. |
|
|
“selectTask” |
Select tasks. |
|
|
“selectTaskAll” |
Select all tasks. |
|
|
“setActionenable” on page 7-103 |
Set enable/disable status for |
|
|
|
a check action. |
|
|
“setBaselineMode” |
Set baseline mode for the |
|
|
|
Model Advisor. |
|
|
“setCheckErrorSeverity” on page |
Set severity of a check failure. |
|
|
7-105 |
|
|
7-83

Simulink.ModelAdvisor
|
Name |
Description |
|
|
“setCheckResult” |
Set result for the currently |
|
|
|
running check. |
|
|
“setCheckResultData” |
Set result data for the |
|
|
|
currently running check. |
|
|
“setCheckResultStatus” |
Set pass/fail status for the |
|
|
|
currently running check. |
|
|
“setListViewParameters” on page |
Set list view parameters for |
|
|
7-108 |
a check. |
|
|
“verifyCheckRan” |
Verify that checks have run. |
|
|
“verifyCheckResult” |
Generate a baseline set of |
|
|
|
check results or compare the |
|
|
|
current set of results to the |
|
|
|
baseline results. |
|
|
“verifyCheckResultStatus” |
Verify that a model has |
|
|
|
passed or failed a set of |
|
|
|
checks. |
|
|
“verifyHTML” |
Generate a baseline report or |
|
|
|
compare the current report |
|
|
|
to a baseline report. |
|
Methods closeReport
Purpose
Close Model Advisor report
Syntax
closeReport
Description
Closes the report associated with this Model Advisor object, which closes the Model Advisor window.
See Also
“displayReport”
7-84
Simulink.ModelAdvisor
deselectCheck
Purpose
Clear check
Syntax
success = deselectCheck(ID)
Arguments
ID
String or cell array that specifies the IDs of the checks to be cleared.
success
True (1) if the check is cleared.
Description
This method clears the checks specified by ID.
Note This method cannot clear disabled checks.
See Also
“getCheckAll”, “deselectCheckForGroup”, “selectCheck”
deselectCheckAll
Purpose
Clear all checks
Syntax
success = deselectCheckAll
Arguments
success
True (1) if all checks are cleared.
Description
Clears all checks that are not disabled.
7-85

Simulink.ModelAdvisor
See Also
“selectCheckAll”
deselectCheckForGroup
Purpose
Clear group of checks
Syntax
success = deselectCheckForGroup(groupName)
Arguments
groupName
String or cell array that specifies the names of the groups to be cleared.
success
True (1) if the method succeeds in clearing the specified group.
Description
Clears a specified group of checks.
See Also
“selectCheckForGroup”
deselectCheckForTask
Purpose
Clear checks that belong to specified task or set of tasks
Syntax
success = deselectCheckForTask(ID)
Arguments
ID
String or cell array of strings that specify the IDs of tasks whose checks are to be cleared.
success
True (1) if the specified tasks are cleared.
Description
Clears checks belonging to the tasks specified by the ID argument.
7-86

Simulink.ModelAdvisor
See Also
“getTaskAll”, “selectCheckForTask”
deselectTask
Purpose
Clear task
Syntax
success = deselectTask(ID)
Arguments
ID
String or cell array that specifies the ID of tasks to be cleared
success
True (1) if the method succeeded in clearing the specified tasks.
Description
Clears the tasks specified by ID.
See Also
“selectTask”, “getTaskAll”
deselectTaskAll
Purpose
Clears all tasks
Syntax
success = deselectTaskAll
Arguments
success
True (1) if this method succeeds in clearing all tasks.
Description
Clears all tasks.
See Also
“selectTaskAll”
7-87

Simulink.ModelAdvisor
displayReport
Purpose
Display report in Model Advisor window
Syntax
displayReport
Description
Displays the report associated with this Model Advisor object in the Model Advisor window. The report includes the most recent results of running checks on the system associated with this Model Advisor object and the current selection status of checks, groups, and tasks for the system.
See Also
“Simulink.ModelAdvisor.reportexists”
exportReport
Purpose
Create copy of report generated by Model Advisor
Syntax
[success message] = exportReport(destination)
Arguments
destination
Path name of copy to be made of the report file.
success
True (1) if this method succeeded in creating a copy of the report at the specified location.
message
Empty if the copy was successful; otherwise, the reason the copy did not succeed.
Description
This method creates a copy of the last report generated by the Model Advisor and stores the copy at the specified location.
7-88

Simulink.ModelAdvisor
See Also
“Simulink.ModelAdvisor.reportexists”
filterResultWithExclusion
Purpose
Filter objects that have been excluded by user-defined exclusions.
Syntax
filteredResultHandles = obj.filterResultWithExclusion(ResultHandles)
Arguments
filteredResultHandles
An array of objects causing exclusion enabled checks to warn or fail.
obj
A variable representing the
Simulink.ModelAdvisor.getModelAdvisor object.
ResultHandles
An array of objects causing a check warning or failure.
Description
This method filters objects that cause a check warning or failure with checks that have exclusions enabled.
Note This method is intended for excluding objects from custom checks created with the Model Advisor’s customization API, a feature available with Simulink Verification and Validation™ .
See Also
“getModelAdvisor” on page 7-96
7-89

Simulink.ModelAdvisor
getBaselineMode
Purpose
Determine whether Model Advisor is in baseline data generation mode
Syntax
mode = getBaselineMode
Arguments
mode
Boolean value indicating baseline mode.
Description
The mode output variable returns true if the Model Advisor is in baseline data mode. Baseline data mode causes the verification methods of the Model Advisor, for example, “verifyHTML”, to generate baseline data.
See Also
“setBaselineMode”, “verifyHTML”, “verifyCheckResult”, “verifyCheckResultStatus”
getCheckAll
Purpose
Get IDs of all checks
Syntax
IDs = getCheckAll
Arguments
IDs
Cell array of strings specifying the IDs of all checks performed by
the Model Advisor.
Description
Returns a cell array of strings specifying the IDs of all checks performed by the Model Advisor.
See Also
“getTaskAll”, “getGroupAll”
7-90

Simulink.ModelAdvisor
getCheckForGroup
Purpose
Get checks that belong to check group
Syntax
IDs = getCheckForTask(groupName)
Arguments
groupName
String specifying the name of a group.
IDs
Cell array of IDs.
Description
Returns a cell array of IDs of the tasks and checks belonging to the group specified by groupName.
See Also
“getCheckForTask”
getCheckForTask
Purpose
Get checks that belong to task
Syntax
checkIDs = getCheckForTask(taskID)
Arguments
taskID
ID of a task.
checkIDs
Cell array of IDs of checks belonging to the specified task.
Description
Returns a cell array of IDs of the checks belonging to the task specified by taskID.
See Also
“getCheckForGroup”
7-91

Simulink.ModelAdvisor
getCheckResult
Purpose
Get results of running check or set of checks
Syntax
result = getCheckResult(ID)
Arguments
ID
ID of a check or cell array of check IDs.
result
A check result or cell array of check results.
Description
Gets results for the specified checks. The format of the results depends on the checks that generated the data.
Note This method is intended for accessing results generated by custom checks created with the Model Advisor’s customization API, an optional feature available with Simulink Verification and Validation software. For more information, see the Simulink Verification and Validation documentation.
See Also
“getCheckResultData”, “getCheckResultStatus”
getCheckResultData
Purpose
Get data resulting from running check or set of checks
Syntax
result = getCheckResultData(ID)
Arguments
ID
Check ID or cell array of check IDs.
7-92

Simulink.ModelAdvisor
result
Data from a check result or cell array of data from check results.
Description
Gets the check result data for the specified checks. The format of the data depends on the checks that generated the data.
Note This method is intended for accessing check result data generated by custom checks created with the Model Advisor’s customization API, an optional feature available with Simulink Verification and Validation software. For more information, see the Simulink Verification and Validation documentation.
See Also
“getCheckResult”, “getCheckResultStatus”
getCheckResultStatus
Purpose
Get status of check or set of checks
Syntax
result = getCheckResultStatus(ID)
Arguments
ID
Check ID or cell array of check IDs.
result
Boolean or a cell array of Boolean values indication the pass or fail status of a check or set of checks.
Description
Invoke this method after running a set of checks to determine whether the checks passed or failed.
See Also
“getCheckResult”, “getCheckResultData”
7-93

Simulink.ModelAdvisor
getGroupAll
Purpose
Get all groups of checks run by Model Advisor
Syntax
IDs = getGroupAll
Arguments
IDs
Cell array of IDs of all groups of checks run by the Model Advisor.
Description
Returns a cell array of IDs of all groups of checks run by the Model Advisor.
See Also
“getCheckAll”, “getTaskAll”
getInputParameters
Purpose
Get input parameters of check
Syntax
params = obj.getInputParameters(check_ID)
Arguments
params
A cell array of ModelAdvisor.InputParameter objects.
obj
A variable representing the Simulink.ModelAdvisor object.
check_ID
A string that uniquely identifies the check.
You can omit the check_ID if you use the method inside a check callback function.
Description
Returns the input parameters associated with a check.
7-94
Simulink.ModelAdvisor
Note This method is intended for accessing custom checks created with the Model Advisor’s customization API, an optional feature available with Simulink Verification and Validation software. For more information, see the Simulink Verification and Validation documentation.
See Also
ModelAdvisor.InputParameter
getListViewParameters
Purpose
Get list view parameters of check
Syntax
params = obj.getListViewParameters(check_ID)
Arguments
params
A cell array of ModelAdvisor.ListViewParameter objects.
obj
A variable representing the Simulink.ModelAdvisor object.
check_ID
A string that uniquely identifies the check.
You can omit the check_ID if you use the method inside a check callback function.
Description
Returns the list view parameters associated with a check.
7-95

Simulink.ModelAdvisor
Note This method is intended for accessing custom checks created with the Model Advisor’s customization API, an optional feature available with Simulink Verification and Validation software. For more information, seethe Simulink Verification and Validation documentation.
See Also
“setListViewParameters” on page 7-108,
ModelAdvisor.ListViewParameter
getModelAdvisor
Purpose
Get Model Advisor object for system or subsystem
Syntax
obj = Simulink.ModelAdvisor.getModelAdvisor(system)
obj = Simulink.ModelAdvisor.getModelAdvisor(system, 'new')
Arguments
system
Name of model or subsystem.
'new'
Required when changing Model Advisor working scope from one system to another without closing the previous session. Alternatively, you can close the previous session before invoking getModelAdvisor, in which case 'new' can be omitted.
obj
Model Advisor object.
Description
This static method (see “Static Methods”) creates and returns an instance of Simulink.ModelAdvisor class for the model or subsystem specified by system.
7-96

Simulink.ModelAdvisor
getSelectedCheck
Purpose
Get currently selected checks
Syntax
IDs = getSelectedCheck
Arguments
IDs
Cell array of IDs of currently selected checks.
Description
Returns the IDs of the currently selected checks in the Model Advisor.
See Also
“getSelectedTask”
getSelectedSystem
Purpose
Get system currently targeted by Model Advisor
Syntax
path = getSelectedSystem
Arguments
path
Path of the selected system.
Description
Gets the path of the system currently targeted by the Model Advisor. That is, the system or subsystem most recently selected for checking either interactively by the user or programmatically via
Simulink.ModelAdisor.getModelAdvisor.
See Also
“getModelAdvisor”
getSelectedTask
Purpose
Get selected tasks
7-97

Simulink.ModelAdvisor
Syntax
IDs = getSelectedTask
Arguments
IDs
Cell array of IDs of currently selected tasks.
Description
Returns the IDs of the currently selected tasks in the Model Advisor.
See Also
“getSelectedCheck”
getTaskAll
Purpose
Get tasks run by Model Advisor
Syntax
IDs = getTaskAll
Arguments
IDs
Cell array of IDs of tasks run by the Model Advisor.
Description
Returns a cell array of IDs of tasks run by the Model Advisor.
See Also
“getCheckAll”, “getGroupAll”
Simulink.ModelAdvisor.openConfigUI
Purpose
Starts Model Advisor Configuration editor
Syntax
Simulink.ModelAdvisor.openConfigUI
Description
This static method starts the Model Advisor Configuration editor. Use the Model Advisor Configuration editor to create customized configurations for the Model Advisor.
7-98

Simulink.ModelAdvisor
Note The Model Advisor Configuration editor is an optional feature available with Simulink Verification and Validation software (see “Organize Checks and Folders Using the Model Advisor Configuration Editor”for more information).
•Before starting the Model Advisor Configuration editor, ensure that the current folder is writable. If the folder is not writable, you see an error message when you start the Model Advisor Configuration editor.
•The Model Advisor Configuration editor uses the Simulink project (slprj) folder (for more information, see “Model Reference Simulation Targets”) in the current folder to store reports and other information. If this folder does not exist in the current folder, the Model Advisor Configuration editor creates it.
Simulink.ModelAdvisor.reportexists
Purpose
Determine whether report exists for model or subsystem
Syntax
exists = reportexists('system')
Arguments
system
String specifying path of a system or subsystem.
exists
True (1) if a report exists for system.
Description
This method returns true (1) if a report file exists for the model (system) or subsystem specified by system in the slprj/modeladvisor subfolder of the MATLAB working folder.
See Also
“exportReport”
7-99

Simulink.ModelAdvisor
runCheck
Purpose
Run currently selected checks
Syntax
success = runCheck
Arguments
success
True (1) if the checks were run.
Description
Runs the checks currently selected in the Model Advisor. Invoking this method is equivalent to selecting the Run Selected Checks button on the Model Advisor window.
See Also
“selectCheck”
runTask
Purpose
Run currently selected tasks
Syntax
success = runTask
Arguments
success
True (1) if the tasks were run.
Description
Runs the tasks currently selected in the Model Advisor. Invoking this method is equivalent to selecting the Run Selected Checks button on the Model Advisor window.
See Also
“selectTask”
7-100

Simulink.ModelAdvisor
selectCheck
Purpose
Select check
Syntax
success = selectCheck(ID)
Arguments
ID
ID or cell array of IDs of checks to be selected.
success
True (1) if this method succeeded in selecting the specified checks.
Description
Select the check specified by ID. This method cannot select a check that is disabled.
See Also
“selectCheckAll”, “selectCheckForGroup”, “deselectCheck”
selectCheckAll
Purpose
Select all checks
Syntax
success = selectCheckAll
Arguments
success
True (1) if this method succeeded in selecting all checks.
Description
Selects all checks that are not disabled.
See Also
“selectCheck”, “selectCheckForGroup”, “deselectCheck”
selectCheckForGroup
Purpose
Select group of checks
7-101

Simulink.ModelAdvisor
Syntax
success = selectCheckForGroup(ID)
Arguments
ID
ID or cell array of group IDs.
success
True (1) if this method succeeded in selecting the specified groups
Description
Selects the groups specified by ID.
See Also
“deselectCheckForGroup”
selectCheckForTask
Purpose
Select checks that belong to specified task or set of tasks
Syntax
success = selectCheckForTask(ID)
Arguments
ID
ID or cell array of IDs of tasks whose checks are to be selected.
success
True (1) if this method succeeded in selecting the checks for the specified tasks
Description
Selects checks belonging to the tasks specified by the ID argument.
See Also
“deselectCheckForTask”
selectTask
Purpose
Select task
7-102

Simulink.ModelAdvisor
Syntax
success = selectTask(ID)
Arguments
ID
ID or cell array of IDs of the task to be selected.
success
True (1) if this method succeeds in selecting the specified tasks.
Description
Selects a task.
See Also
“deselectTask”
selectTaskAll
Purpose
Select all tasks
Syntax
success = selectTaskAll
Arguments
success
True (1) if this method succeeds in selecting all tasks.
Description
Selects all tasks.
See Also
“deselectTaskAll”
setActionenable
Purpose
Set status for check action
Syntax
obj.setActionenable(value)
7-103

Simulink.ModelAdvisor
Arguments
obj
A variable representing the Simulink.ModelAdvisor object.
value
Boolean value indicating whether the Action box is enabled or disabled.
•true — enable the Action box.
•false — Disable the Action box.
Description
The setActionenable method specifies the enables or disables the Action box. Only a check callback function can invoke this method.
Note This method is intended for accessing custom checks created with the Model Advisor’s customization API, an optional feature available with Simulink Verification and Validation software. For more information, seethe Simulink Verification and Validation documentation.
See Also
ModelAdvisor.Action
setBaselineMode
Purpose
Set baseline data generation mode for Model Advisor
Syntax
setBaselineMode(mode)
Arguments
mode
Boolean value indicating setting of Model Advisor’s baseline mode, either on (true) or off (false).
7-104
Simulink.ModelAdvisor
Description
Sets the Model Advisor’s baseline mode to mode. Baseline mode causes the Model Advisor’s verify methods to generate baseline comparison data for verifying the results of a Model Advisor run.
See Also
“getBaselineMode”, “verifyCheckResult”, “verifyHTML”
setCheckErrorSeverity
Purpose
Set severity of check failure
Syntax
obj.setCheckErrorSeverity(value)
Arguments
obj
A variable representing the Simulink.ModelAdvisor object.
value
Integer indicating severity of failure.
•0 — Check Result = Warning
•1 — Check Result = Failed
Description
Sets result status for a currently running check that fails to value. Only a check callback function can invoke this method.
Note This method is intended for accessing custom checks created with the Model Advisor’s customization API, an optional feature available with Simulink Verification and Validation software. For more information, seethe Simulink Verification and Validation documentation.
See Also
“setCheckResultStatus”
7-105

Simulink.ModelAdvisor
setCheckResult
Purpose
Set result for currently running check
Syntax
success = setCheckResult(result)
Arguments
result
String or cell array that specifies the result of the currently running task.
success
True (1) if this method succeeds in setting the check result.
Description
Sets the check result for the currently running check. Only the callback function of a check can invoke this method.
Note This method is intended for use with custom checks created with the Model Advisor’s customization API, an optional feature available with Simulink Verification and Validation software. For more information, seethe Simulink Verification and Validation documentation.
See Also
“getCheckResult”, “setCheckResultData”, “setCheckResultStatus”
setCheckResultData
Purpose
Set result data for currently running check
Syntax
success = setCheckResultData(data)
Arguments
data
Result data to be set.
7-106

Simulink.ModelAdvisor
success
True (1) if this method succeeds in setting the result data for the current check
Description
Sets the check result data for the currently running check. Only the callback function of a check can invoke this method.
Note This method is intended for use with custom checks created with the Model Advisor’s customization API, an optional feature available with Simulink Verification and Validation software. For more information, seethe Simulink Verification and Validation documentation.
See Also
“getCheckResultData”, “setCheckResult”, “setCheckResultStatus”
setCheckResultStatus
Purpose
Set status for currently running check
Syntax
success = setCheckResultStatus(status)
Arguments
status
Boolean value that indicates the status of the check that just ran, either pass (true) or fail (false)
success
True (1) if the status was set.
Description
Sets the pass or fail status for the currently running check to status. Only the callback function of the check can invoke this method.
7-107
Simulink.ModelAdvisor
Note This method is intended for use with custom checks created with the Model Advisor’s customization API, an optional feature available with Simulink Verification and Validation software. For more information, see the Simulink Verification and Validation documentation.
See Also
“getCheckResultStatus”, “setCheckResult”, “setCheckResultData”, “setCheckErrorSeverity” on page 7-105
setListViewParameters
Purpose
Specify list view parameters for check
Syntax
obj.setListViewParameters(check_ID, params)
Arguments
obj
A variable representing the Simulink.ModelAdvisor object.
check_ID
A string that uniquely identifies the check.
You can omit the check_ID if you use the method inside a check callback function.
params
A cell array of ModelAdvisor.ListViewParameter objects.
Description
Set the list view parameters for the check.
7-108

Simulink.ModelAdvisor
Note This method is intended for accessing custom checks created with the Model Advisor’s customization API, an optional feature available with Simulink Verification and Validation software. For more information, seethe Simulink Verification and Validation documentation.
See Also
“getListViewParameters” on page 7-95,
ModelAdvisor.ListViewParameter
verifyCheckRan
Purpose
Verify that Model Advisor has run set of checks
Syntax
[success, missingChecks, additionalChecks] = verifyCheckRan(IDs)
Arguments
IDs
Cell array of IDs of checks to verify.
success
Boolean value specifying whether the checks ran.
missingChecks
Cell array of IDs for specified checks that ran.
additionalChecks
Cell array of IDs for unspecified checks that ran.
Description
The output variable success returns true if all the checks specified by IDs have run. If not, success returns false, missingChecks lists specified checks that did not run. The additionalChecks argument lists unspecified checks that ran.
7-109

Simulink.ModelAdvisor
See Also
“verifyCheckResultStatus”
verifyCheckResult
Purpose
Generate baseline Model Advisor check results file or compare current check results to baseline check results
Syntax
[success message] = verifyCheckResult(baseline, checkIDs)
Arguments
baseline
Path of the baseline check results MAT-file.
checkIDs
Cell array of check IDs.
success
Boolean value specifying whether the method succeeded.
message
String specifying an error message.
Description
If the Model Advisor is in baseline mode (see “setBaselineMode”), this method stores the most recent results of running the checks specified by checkIDs in a MAT-file at the location specified by baseline. If the method is unable to store the check results at the specified location, it returns false in the output variable success and the reason for the failure in the output variable message. If the Model Advisor is not
in baseline mode, this method compares the most recent results of running the checks specified by checkIDs with the report specified by baseline. If the current results match the baseline results, this method returnstrue as the value of the success output variable.
Note You must run the checks specified by checkIDs (see “runCheck”) before invoking verifyCheckResult.
7-110

Simulink.ModelAdvisor
This method enables you to compare the most recent check results generated by the Model Advisor with a baseline set of check results. You can use the method to generate the baseline report as well as perform current-to-baseline result comparisons. To generate a baseline report, put the Model Advisor in baseline mode, using “setBaselineMode”. Then invoke this method with the baseline argument set to the location where you want to store the baseline results. To perform a current-to-baseline report comparison, first ensure that the Model Advisor is not in baseline mode (see “getBaselineMode”). Then invoke this method with the path of the baseline report as the value of the baseline input argument.
See Also
“setBaselineMode”, “getBaselineMode”, “runCheck”, “verifyCheckResultStatus”
verifyCheckResultStatus
Purpose
Verify that model has passed or failed set of checks
Syntax
[success message] = verifyCheckResultStatus(baseline, checkIDs)
Arguments
baseline
Array of Boolean variables.
checkIDs
Cell array of check IDs.
success
Boolean value specifying whether the method succeeded.
message
String specifying an error message.
Description
This method compares the passor fail (true or false) statuses from the most recent running of the checks specified by checkIDs with the Boolean values specified by baseline. If the statuses match the
7-111

Simulink.ModelAdvisor
baseline, this method returns true as the value of the success output variable.
Note You must run the checks specified by checkIDs (see “runCheck”) before invoking verifyCheckResultStatus.
See Also
“runCheck”
verifyHTML
Purpose
Generate baseline Model Advisor report or compare current report to baseline report
Syntax
[success message] = verifyHTML(baseline)
Arguments
baseline
Path of a Model Advisor report.
success
Boolean value specifying whether the method succeeded.
message
String specifying an error message.
Description
If the Model Advisor is in baseline mode (see “setBaselineMode”), this method stores the report most recently generated by the Model Advisor at the location specified by baseline. If the method is unable to store a copy of the report at the specified location, it returns false in the output variable success and the reason for the failure in the output variable message. If the Model Advisor is not in baseline mode, this method compares the report most recently generated by the Model Advisor with the report specified by baseline. If the current report has
7-112

Simulink.ModelAdvisor
exactly the same content as the baseline report, this method returns true as the value of the success output variable.
This method enables you to compare a report generated by the Model Advisor with a baseline report to determine if they differ. You can use the method to generate the baseline report as well as perform current-to-baseline report comparisons. To generate a baseline report, put the Model Advisor in baseline mode. Then invoke this method with the baseline argument set to the location where you want to store the baseline report. To perform a current-to-baseline report comparison, first ensure that the Model Advisor is not in baseline mode (see “getBaselineMode”). The invoke this method with the path of the baseline report as the value of the baseline input argument.
See Also
“setBaselineMode”, “getBaselineMode”, “verifyCheckResult”
7-113

Simulink.ModelDataLogs
Purpose |
Container for model’s signal data logs |
Description
Note The ModelDataLogs format is supported for backwards compatibility. The ModelDataLogs format will be removed in a future release. For an existing model that uses the ModelDataLogs format, you should migrate the model to use Dataset format. For details, see “ Migrate from ModelDataLogs to Dataset Format”.
For new models, use the Dataset logging format, which stores logged data in Simulink.SimulationData.Dataset objects.
If you set Configuration Parameters > Data Import/Export > Signal logging format to ModelDataLogs, Simulink software creates instances of the Simulink.ModelDataLogs class to contain signal logs that it creates while simulating a model (see “Signal Logging”). In particular, Simulink software creates an instance of this class for a top model and for each model referenced by the top model that contains signals to be logged. Simulink software assigns the ModelDataLogs object for the top model to a variable in the MATLAB workspace. The name of the variable is the name specified in the Signal logging name field on the Data Import/export pane of the model’s Configuration Parameters dialog box. The default value is logsout.
A ModelDataLogs object has a variable number of properties. The first property, named Name, specifies the name of the model whose signal data the object contains or, if the model is a referenced model, the name of the Model block that references the model. The remaining properties reference objects that contain signal data logged during simulation of the model. The objects may be instances of any of the following types of objects:
•Simulink.ModelDataLogs
Container for the data logs of a model
•Simulink.SubsysDataLogs
7-114
Simulink.ModelDataLogs
Container for the data logs of a subsystem
•Simulink.ScopeDataLogs
Container for the data logs of Scope signal viewers
•Simulink.Timeseries
Data log for any signal except a mux or bus signal
•Simulink.TsArray
Data log for a mux or bus signal
The names of the properties identify the data being logged as follows:
•For signal data logs, the name of the signal
•For a subsystem or model log container, the name of the subsystem or model, respectively
•For a scope viewer data log, the name specified on the viewer’s parameter dialog box
Note If a name contains spaces, the ModelDataLogs objects specifies its name as ('name') where name is the actual name, e.g., ('Brake Subsystem'). See “Handling Spaces and Newlines in Logged Names” for more information.
Consider, for example, the following model.
7-115

Simulink.ModelDataLogs
As indicated by the testpoint icons, this model specifies that Simulink software should log the signals named step and scope in the model’s root system and the signal named clk in the subsystem named Delayed Out. After simulation of this model, the MATLAB workspace contains the following variable:
>> logsout |
|
|
logsout = |
|
|
Simulink.ModelDataLogs (siglgex): |
|
|
Name |
elements |
Simulink Class |
scope |
2 |
TsArray |
step |
1 |
Timeseries |
('Delayed Out') |
2 |
SubsysDataLogs |
7-116

Simulink.ModelDataLogs
The logsout variable contains the signal data logged during the simulation. You can use fully qualified object names or the Simulink unpack command to access the signal data stored in logsout. For example, to access the amplitudes of the clk signal in the Delayed Out subsystem, enter
>> data = logsout.('Delayed Out').clk.Data;
or
>>logsout.unpack('all');
>>data = clk.Data;
You can use a custom logging name or signal name when logging a signal. If you use the signal name, and that name occupies more than one line, include an sprintf('\n') between the lines of the signal name when accessing the logged data. For example, to access the signal in the following model:
Use the following syntax:
logsout.(['scope' sprintf('\n') '(delayed out)'])
See “Handling Spaces and Newlines in Logged Names” for more information.
See Also “Signal Logging”, Simulink.SubsysDataLogs, Simulink.ScopeDataLogs, Simulink.Timeseries, Simulink.TsArray, who, whos, unpack
7-117

Simulink.SimState.ModelSimState
Purpose
Description
Properties
Methods
Access SimState snapshot data
The Simulink.SimState.ModelSimState class contains all of the information associated with a “snapshot” of a simulation, including the logged states, the time of the snapshot, and the start time of the simulation. To access these data for a block, use the getBlockSimState method or the loggedStates property.
description
Specify a description. By default, Simulink software generates a string based on your model name.
loggedStates
The logged states are the continuous and discrete states of the blocks in a model. These states represent a subset of the complete simulation state (SimState) of the model.
Attributes:
dependent
snapshotTime
Time at which Simulink software takes a “snapshot” of the complete simulation states. This data is read only.
startTime
Time at which the simulation starts. This data is read only.
getBlockSimState |
Access SimState of individual |
|
Stateflow Chart, MATLAB |
|
Function, or S-function block |
setBlockSimState |
Set SimState of individual |
|
Stateflow Chart, MATLAB |
|
Function, or S-function block |
7-118

Simulink.SimState.ModelSimState
Copy |
Value. To learn how value classes affect copy operations, see Copying |
Semantics |
Objects in the MATLAB Programming Fundamentals documentation. |
7-119

Simulink.ModelManagement.Project.CurrentProject
Purpose |
Manipulate the currently open Simulink project from the command line |
|
Description |
Use an instance of |
|
|
Simulink.ModelManagement.Project.CurrentProject class |
|
|
to perform the following operations. |
|
|
• Open and close Simulink projects |
|
|
• Investigate the properties of the currently open Simulink project |
|
|
• Change some properties of the currently open Simulink project |
|
Construction |
Create an instance of the class as follows. |
|
|
p = Simulink.ModelManagement.Project.CurrentProject(); |
|
Methods |
addFileToProject |
Add a file to the currently open |
|
|
Simulink project |
|
attachLabelToFile |
Add a label to a file in the |
|
|
currently open Simulink project |
|
close |
Close the currently open Simulink |
|
|
project |
|
createCategory |
Create a category in the currently |
|
|
open Simulink project |
|
createLabel |
Create a label in a category in the |
|
|
currently open Simulink project |
|
detachLabelFromFile |
Remove a label from a file in the |
|
|
currently open Simulink project |
|
export |
Export Simulink project to Zip file |
7-120

Simulink.ModelManagement.Project.CurrentProject
getAttachedLabels |
Get a list of labels attached |
|
to a file in the currently open |
|
Simulink project |
getCategories |
Get a list of the categories of |
|
file labels in the currently open |
|
Simulink project |
getFilesInProject |
Get a list of files in the currently |
|
open Simulink project |
getLabels |
Get a list of labels in a category |
|
in the currently open Simulink |
|
project |
getProjectName |
Get the name of the currently |
|
open Simulink project |
getRootDirectory |
Get the name of the root folder |
|
for the currently open Simulink |
|
project |
getRootFolder |
Get the name of the root folder |
|
for the currently open Simulink |
|
project |
isProjectLoaded |
Return true when a Simulink |
|
project is loaded and false when |
|
no project is loaded |
loadProject |
Load an existing Simulink project |
|
and close any currently open |
|
project |
removeCategory |
Remove a category from the |
|
currently open Simulink project |
removeFileFromProject |
Remove a file from the currently |
|
open Simulink project |
7-121

Simulink.ModelManagement.Project.CurrentProject
Examples
How To
removeLabel |
Remove a label from a category |
|
in the currently open Simulink |
|
project |
setProjectName |
Change the name of the currently |
|
open Simulink project |
This example creates a new instance of the
Simulink.ModelManagement.Project.CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
• “Simulink Projects”
7-122

Simulink.ModelWorkspace
Purpose
Description
Property
Summary
Method
Summary
Describe model workspace
Instances of this class describe model workspaces. Simulink software creates an instance of this class for each model that you open during a Simulink session. See “Model Workspaces” for more information.
|
Name |
Access |
|
Description |
|
|
DataSource |
RW |
|
Specifies the source used to initialize this |
|
|
|
|
|
workspace. Valid values are |
|
|
|
|
|
• 'Model File' |
|
|
|
|
|
• 'MAT-File' |
|
|
|
|
|
• 'MATLAB Code' |
|
|
|
|
|
• 'MATLAB File' |
|
|
|
|
|
|
|
|
FileName |
RW |
|
Specifies the name of the MAT-file |
|
|
|
|
|
used to initialize this workspace. |
|
|
|
|
|
Simulink software ignores this property |
|
|
|
|
|
if DataSource is neither 'MAT-File' nor |
|
|
|
|
|
'MATLAB Code'. |
|
|
MATLABCode |
RW |
|
A string specifying MATLAB code used |
|
|
|
|
|
to initialize this workspace. Simulink |
|
|
|
|
|
software ignores this property if |
|
|
|
|
|
DataSource is not 'MATLAB Code'. |
|
|
|
|
|
|
|
|
Name |
|
Description |
|
|
|
“assignin” |
|
Assign a value to a variable in the model’s |
|
|
|
|
|
workspace. |
|
|
|
“clear” |
|
Clear the model’s workspace. |
|
|
|
|
|
|
|
|
7-123

Simulink.ModelWorkspace
|
Name |
Description |
|
|
“evalin” |
Evaluate an expression in the model’s |
|
|
|
workspace. |
|
|
“reload” |
Reload the model workspace from the |
|
|
|
workspace’s data source. |
|
|
“save” |
Save the model’s workspace to a specified |
|
|
|
MAT-file. |
|
|
“saveToSource” |
Save the workspace to the MAT-file that the |
|
|
|
workspace designates as its data source. |
|
|
“whos” |
List the variables in the model workspace. |
|
|
|
|
|
Methods
assignin
Purpose
Assign a value to a variable in the model’s workspace.
Syntax
assignin('varname', varvalue)
Arguments
varname
Name of the variable to be assigned a value.
varvalue
Value to be assigned the variable.
Description
This method assigns the value specified by varvalue to the variable whose name is varname.
See also
“evalin”
7-124
Simulink.ModelWorkspace
clear
Purpose
Clear the model’s workspace.
Syntax clear
Description
This method empties the workspace of its variables.
evalin
Purpose
Evaluate an expression in the model’s workspace.
Syntax evalin('expression')
Arguments
expression
A MATLAB expression to be evaluated.
Description
This method evaluates expression in the model workspace.
See also
“assignin”
reload
Purpose
Reload the model workspace from the workspace’s data source.
Syntax reload
Description
This method reloads the model workspace from the data source specified by its DataSource parameter. The data source must be 'MAT-File',
'MATLAB Code', or 'MATLAB File' .
7-125
Simulink.ModelWorkspace
See also
“saveToSource”
save
Purpose
Save the model’s workspace to a specified MAT-file.
Syntax
save('filename')
Arguments
filename
Name of a MAT-file.
Description
This method saves the model’s workspace to the MAT-file specified by filename.
Note This method allows you to save the workspace to a file other than the file specified by the workspace’s FileName property. If you want to save the model workspace to the file specified by the file’s FileName property, it is simpler to use the workspace’s saveToSource method.
example
hws = get_param('mymodel','modelworkspace') hws.DataSource = 'MAT-File';
hws.FileName = 'workspace'; hws.assignin('roll', 30); hws.saveToSource; hws.assignin('roll', 40); hws.save('workspace_test.mat');
See also
“reload”, “saveToSource”
7-126

Simulink.ModelWorkspace
saveToSource
Purpose
Save the workspace to the MAT-file that it designates as its data source.
Syntax
saveToSource
Description
This method saves the model workspace designated by its FileName property.
example
hws = get_param('mymodel','modelworkspace') hws.DataSource = 'MAT-File';
hws.FileName = 'params'; hws.assignin('roll', 30); hws.saveToSource;
See also
“save”, “reload”
whos
Purpose
List the variables in the model workspace.
Syntax
whos
Description
This method lists the variables in the model’s workspace. The listing includes the size and class of the variables.
7-127

Simulink.ModelWorkspace
example
>>hws = get_param('mymodel','modelworkspace');
>>hws.assignin('k', 2);
>>hws.whos
Name |
Size |
Bytes |
Class |
k |
1x1 |
8 |
double array |
7-128

Simulink.MSFcnRunTimeBlock
Purpose |
Get run-time information about Level-2 MATLAB S-function block |
Description |
This class allows a Level-2 MATLAB S-function or other MATLAB |
|
program to obtain information from Simulink software and provide |
|
information to Simulink software about a Level-2 MATLAB S-Function |
|
block. Simulink software creates an instance of this class for each |
|
Level-2 MATLAB S-Function block in a model. Simulink software |
|
passes the object to the callback methods of Level-2 MATLAB |
|
S-functions when it updates or simulates a model, allowing the |
|
callback methods to get and provide block-related information to |
|
Simulink software. See “Write Level-2 MATLAB S-Functions” for more |
|
information. |
|
You can also use instances of this class in MATLAB programs to |
|
obtain information about Level-2 MATLAB S-Function blocks during |
|
a simulation. See “Access Block Data During Simulation” for more |
|
information. |
|
The Level-2 MATLAB S-function template |
|
matlabroot/toolbox/simulink/blocks/msfuntmpl.m shows how to |
|
use a number of the following methods. |
Parent |
Simulink.RunTimeBlock |
Class |
|
Derived |
None |
Classes |
|
7-129

Simulink.MSFcnRunTimeBlock
Property
Summary
Method
Summary
|
Name |
Description |
|
|
“AllowSignalsWithMoreThan2D” |
enable Level-2 MATLAB |
|
|
|
S-function to use |
|
|
|
multidimensional signals. |
|
|
“DialogPrmsTunable” |
Specifies which of the |
|
|
|
S-function’s dialog |
|
|
|
parameters are tunable. |
|
|
“NextTimeHit” |
Time of the next sample hit |
|
|
|
for variable sample time |
|
|
|
S-functions. |
|
|
Name |
Description |
|
|
“AutoRegRuntimePrms” |
Register this block’s |
|
|
|
dialog parameters as |
|
|
|
run-time parameters. |
|
|
“AutoUpdateRuntimePrms” |
Update this block’s |
|
|
|
run-time parameters. |
|
|
“IsDoingConstantOutput” |
Determine whether |
|
|
|
the current simulation |
|
|
|
stage is the constant |
|
|
|
sample time stage. |
|
|
“IsMajorTimeStep” |
Determine whether |
|
|
|
the current simulation |
|
|
|
time step is a major |
|
|
|
time step. |
|
|
“IsSampleHit” |
Determine whether the |
|
|
|
current simulation time |
|
|
|
is one at which a task |
|
|
|
handled by this block is |
|
|
|
active. |
|
7-130

Simulink.MSFcnRunTimeBlock
|
Name |
Description |
|
|
“IsSpecialSampleHit” |
Determine whether the |
|
|
|
current simulation time |
|
|
|
is one at which multiple |
|
|
|
tasks handled by this |
|
|
|
block are active. |
|
|
“RegBlockMethod” |
Register a callback |
|
|
|
method for this block. |
|
|
“RegisterDataTypeFxpBinaryPoint” |
Register fixed-point |
|
|
|
data type with binary |
|
|
|
point-only scaling. |
|
|
“RegisterDataTypeFxpFSlopeFixexpBias” |
Register fixed-point |
|
|
|
data type with [Slope |
|
|
|
Bias] scaling specified |
|
|
|
in terms of fractional |
|
|
|
slope, fixed exponent, |
|
|
|
and bias. |
|
|
“RegisterDataTypeFxpSlopeBias” |
Register data type with |
|
|
|
[Slope Bias] scaling. |
|
|
“SetAccelRunOnTLC” |
Specify whether to |
|
|
|
use this block’s TLC |
|
|
|
file to generate the |
|
|
|
simulation target for |
|
|
|
the model that uses it. |
|
|
“SetPreCompInpPortInfoToDynamic” |
Set precompiled |
|
|
|
attributes of this |
|
|
|
block’s input ports |
|
|
|
to be inherited. |
|
|
“SetPreCompOutPortInfoToDynamic” |
Set precompiled |
|
|
|
attributes of this |
|
|
|
block’s output ports |
|
|
|
to be inherited. |
|
7-131

Simulink.MSFcnRunTimeBlock
|
Name |
Description |
|
|
“SetPreCompPortInfoToDefaults” |
Set precompiled |
|
|
|
attributes of this |
|
|
|
block’s ports to the |
|
|
|
default values. |
|
|
“SetSimViewingDevice” |
Specify whether block |
|
|
|
is a viewer. |
|
|
“SupportsMultipleExecInstances” |
|
|
|
“WriteRTWParam” |
Write custom |
|
|
|
parameter information |
|
|
|
to Simulink Coder file. |
|
Properties
AllowSignalsWithMoreThan2D
Description
Allow Level-2 MATLAB S-functions to use multidimensional signals. You must set the AllowSignalsWithMoreThan2D property in the setup method.
Data Type
Boolean
Access
RW
DialogPrmsTunable
Description
Specifies whether a dialog parameter of the S-function is tunable. Tunable parameters are registered as run-time parameters when you call the “AutoRegRuntimePrms” method. Note that SimOnlyTunable parameters are not registered as run-time parameters. For example, the following lines initializes three dialog parameters where the first is tunable, the second in not tunable, and the third is tunable only during simulation.
7-132
Simulink.MSFcnRunTimeBlock
block.NumDialogPrms |
= 3; |
block.DialogPrmsTunable = {'Tunable','Nontunable','SimOnlyTunable'};
Data Type array
Access
RW
NextTimeHit
Description
Time of the next sample hit for variable sample-time S-functions.
Data Type double
Access
RW
Methods
AutoRegRuntimePrms
Purpose
Register a block’s tunable dialog parameters as run-time parameters.
Syntax
AutoRegRuntimePrms;
Description
Use in the PostPropagationSetup method to register this block’s tunable dialog parameters as run-time parameters.
AutoUpdateRuntimePrms
Purpose
Update a block’s run-time parameters.
Syntax
AutoRegRuntimePrms;
7-133

Simulink.MSFcnRunTimeBlock
Description
Automatically update the values of the run-time parameters during a call to ProcessParameters.
See the S-function matlabrootadapt_lms.m in the Simulink model sldemo_msfcn_lms for an example.
IsDoingConstantOutput
Purpose
Determine whether this is in the constant sample time stage of a simulation.
Syntax
bVal = IsDoingConstantOutput;
Description
Returns true if this is the constant sample time stage of a simulation, i.e., the stage at the beginning of a simulation where Simulink software computes the values of block outputs that cannot change during the simulation (see “Constant Sample Time”). Use this method in the Outputs method of an S-function with port-based sample times to avoid unnecessarily computing the outputs of ports that have constant sample time, i.e., [inf, 0].
function Outputs(block)
.
.
if block.IsDoingConstantOutput
ts = block.OutputPort(1).SampleTime; if ts(1) == Inf
%% Compute port's output. end
end
.
.
%% end of Outputs
See “Specifying Port-Based Sample Times” for more information.
7-134
Simulink.MSFcnRunTimeBlock
IsMajorTimeStep
Purpose.
Determine whether current time step is a major or a minor time step.
Syntax
bVal = IsMajorTimeStep;
Description
Returns true if the current time step is a major time step; false, if it is a minor time step. This method can be called only from the Outputs or Update methods.
IsSampleHit
Purpose
Determine whether the current simulation time is one at which a task handled by this block is active.
Syntax
bVal = IsSampleHit(stIdx);
Arguments
stIdx
Global index of the sample time to be queried.
Description
Use in Outputs or Update block methods when the MATLAB S-function has multiple sample times to determine whether a sample hit has occurred at stIdx. The sample time index stIdx is a global index for the Simulink model. For example, consider a model that contains three sample rates of 0.1, 0.2, and 0.5, and a MATLAB S-function block that contains two rates of 0.2 and 0.5. In the MATLAB S-function, block.IsSampleHit(0) returns true for the rate 0.1, not the rate 0.2.
This block method is similar to ssIsSampleHit for C-MeX S-functions, however ssIsSampleHit returns values based on only the sample times contained in the S-function. For example, if the model described
7-135

Simulink.MSFcnRunTimeBlock
above contained a C-MeX S-function with sample rates of 0.2 and 0.5, ssIsSampleHit(S,0,tid) returns true for the rate of 0.2.
Use port-based sample times to avoid using the global sample time index for multi-rate systems (see Simulink.BlockPortData).
IsSpecialSampleHit
Purpose
Determine whether the current simulation time is one at which multiple tasks implemented by this block are active.
Syntax
bVal = IsSpecialSampleHit(stIdx1,stIdx1);
Arguments
stIdx1
Index of sample time of first task to be queried.
stIdx2
Index of sample time of second task to be queried.
Description
Use in Outputs or Update block methods to ensure the validity of data shared by multiple tasks running at different rates. Returns true if a sample hit has occurred at stIdx1 and a sample hit has also occurred at stIdx2 in the same time step (similar to ssIsSpecialSampleHit for C-Mex S-functions).
RegBlockMethod
Purpose
Register a block callback method.
Syntax
RegBlockMethod(methName, methHandle);
Arguments
methName
Name of method to be registered.
7-136

Simulink.MSFcnRunTimeBlock
methHandle
MATLAB function handle of the callback method to be registered.
Description
Registers the block callback method specified by methName and methHandle. Use this method in the setup function of a Level-2 MATLAB S-function to specify the block callback methods that the S-function implements.
RegisterDataTypeFxpBinaryPoint
Purpose
Register fixed-point data type with binary point-only scaling.
Syntax
dtID = RegisterDataTypeFxpBinaryPoint(isSigned, wordLength, fractionalLength, obeyDataTypeOverride);
Arguments
isSigned
true if the data type is signed.
false if the data type is unsigned.
wordLength
Total number of bits in the data type, including any sign bit.
fractionalLength
Number of bits in the data type to the right of the binary point.
obeyDataTypeOverride
true indicates that the Data Type Override setting for the subsystem is to be obeyed. Depending on the value of Data Type Override, the resulting data type could be True Doubles, True Singles, ScaledDouble, or the fixed-point data type specified by the other arguments of the function.
false indicates that the Data Type Override setting is to be ignored.
7-137

Simulink.MSFcnRunTimeBlock
Description
This method registers a fixed-point data type with Simulink software and returns a data type ID. The data type ID can be used to specify the data types of input and output ports, run-time parameters, and DWork states. It can also be used with all the standard data type access methods defined for instances of this class, such as “DatatypeSize”.
Use this function if you want to register a fixed-point data type with binary point-only scaling. Alternatively, you can use one of the other fixed-point registration functions:
•Use “RegisterDataTypeFxpFSlopeFixexpBias” to register a data type with [Slope Bias] scaling by specifying the word length, fractional slope, fixed exponent, and bias.
•Use “RegisterDataTypeFxpSlopeBias” to register a data type with [Slope Bias] scaling.
If the registered data type is not one of the Simulink built-in data types, a Simulink Fixed Point license is checked out.
RegisterDataTypeFxpFSlopeFixexpBias
Purpose
Register fixed-point data type with [Slope Bias] scaling specified in terms of fractional slope, fixed exponent, and bias
Syntax
dtID = RegisterDataTypeFxpFSlopeFixexpBias(isSigned, wordLength, fractionalSlope, fixedexponent, bias, obeyDataTypeOverride);
Arguments
isSigned
true if the data type is signed.
false if the data type is unsigned.
wordLength
Total number of bits in the data type, including any sign bit.
7-138

Simulink.MSFcnRunTimeBlock
fractionalSlope
Fractional slope of the data type.
fixedexponent
exponent of the slope of the data type.
bias
Bias of the scaling of the data type.
obeyDataTypeOverride
true indicates that the Data Type Override setting for the subsystem is to be obeyed. Depending on the value of Data Type Override, the resulting data type could be True Doubles, True Singles, ScaledDouble, or the fixed-point data type specified by the other arguments of the function.
false indicates that the Data Type Override setting is to be ignored.
Description
This method registers a fixed-point data type with Simulink software and returns a data type ID. The data type ID can be used to specify the data types of input and output ports, run-time parameters, and DWork states. It can also be used with all the standard data type access methods defined for instances of this class, such as “DatatypeSize”.
Use this function if you want to register a fixed-point data type by specifying the word length, fractional slope, fixed exponent, and bias. Alternatively, you can use one of the other fixed-point registration functions:
•Use “RegisterDataTypeFxpBinaryPoint” to register a data type with binary point-only scaling.
•Use “RegisterDataTypeFxpSlopeBias” to register a data type with [Slope Bias] scaling.
If the registered data type is not one of the Simulink built-in data types, a Simulink Fixed Point license is checked out.
7-139

Simulink.MSFcnRunTimeBlock
RegisterDataTypeFxpSlopeBias
Purpose
Register data type with [Slope Bias] scaling.
Syntax
dtID = RegisterDataTypeFxpSlopeBias(isSigned, wordLength, totalSlope, bias, obeyDataTypeOverride);
Arguments
isSigned
true if the data type is signed.
false if the data type is unsigned.
wordLength
Total number of bits in the data type, including any sign bit.
totalSlope
Total slope of the scaling of the data type.
bias
Bias of the scaling of the data type.
obeyDataTypeOverride
true indicates that the Data Type Override setting for the subsystem is to be obeyed. Depending on the value of Data Type Override, the resulting data type could be True Doubles, True Singles, ScaledDouble, or the fixed-point data type specified by the other arguments of the function.
false indicates that the Data Type Override setting is to be ignored.
Description
This method registers a fixed-point data type with Simulink software and returns a data type ID. The data type ID can be used to specify the data types of input and output ports, run-time parameters, and DWork states. It can also be used with all the standard data type access
7-140

Simulink.MSFcnRunTimeBlock
methods defined for instances of this class, such as “DatatypeSize” on page 7-174.
Use this function if you want to register a fixed-point data type with [Slope Bias] scaling. Alternatively, you can use one of the other fixed-point registration functions:
•Use “RegisterDataTypeFxpBinaryPoint” to register a data type with binary point-only scaling.
•Use “RegisterDataTypeFxpFSlopeFixexpBias” to register a data type by specifying the word length, fractional slope, fixed exponent, and bias
If the registered data type is not one of the Simulink built-in data types, a Simulink Fixed Point license is checked out.
SetAccelRunOnTLC
Purpose
Specify whether to use block’s TLC file to generate code for the Accelerator mode of Simulink software.
Syntax
SetAccelRunOnTLC(bVal);
Arguments
bVal
May be 'true' (use TLC file) or 'false' (run block in interpreted mode).
Description
Specify if the block should use its TLC file to generate code that runs with the accelerator. If this option is 'false', the block runs in interpreted mode. See the S-function
matlabroot/toolbox/simulink/blocks/msfcn_times_two.m in the Simulink model msfcndemo_timestwo for an example.
7-141

Simulink.MSFcnRunTimeBlock
SetPreCompInpPortInfoToDynamic
Purpose
Set precompiled attributes of this block’s input ports to be inherited.
Syntax
SetPreCompInpPortInfoToDynamic;
Description
Initialize the compiled information (dimensions, data type, complexity, and sampling mode) of this block’s input ports to be inherited. See the
S-function matlabroot/toolbox/simulink/simdemos/adapt_lms.m in the Simulink model sldemo_msfcn_lms for an example.
SetPreCompOutPortInfoToDynamic
Purpose
Set precompiled attributes of this block’s output ports to be inherited.
Syntax
SetPreCompOutPortInfoToDynamic;
Description
Initialize the compiled information (dimensions, data type, complexity, and sampling mode) of the block’s output ports to be inherited. See the
S-function matlabroot/toolbox/simulink/simdemos/adapt_lms.m in the Simulink model sldemo_msfcn_lms for an example.
SetPreCompPortInfoToDefaults
Purpose
Set precompiled attributes of this block’s ports to the default values.
Syntax
SetPreCompPortInfoToDefaults;
Description
Initialize the compiled information (dimensions, data type, complexity, and sampling mode) of the block’s ports to the default values. By default, a port accepts a real scalar sampled signal with a data type of double.
7-142

Simulink.MSFcnRunTimeBlock
SetSimViewingDevice
Purpose
Specify whether this block is a viewer.
Syntax
SetSimViewingDevice(bVal);
Arguments
bVal
May be 'true' (is a viewer) or 'false' (is not a viewer).
Description
Specify if the block is a viewer/scope. If this flag is specified, the block will be used only during simulation and automatically stubbed out in generated code.
SupportsMultipleExecInstances
Purpose
Specify whether or not a For Each Subsystem supports an S-function inside of it.
Syntax
SupportsMultipleExecInstances(bVal);
Arguments
bVal
May be 'true' (S-function is supported) or 'false' (S-function is not supported).
Description
Specify if an S-function can operate within a For Each Subsystem.
WriteRTWParam
Purpose
Write a custom parameter to the Simulink Coder information file used for code generation.
7-143

Simulink.MSFcnRunTimeBlock
Syntax
WriteRTWParam(pType, pName, pVal)
Arguments
pType
Type of the parameter to be written. Valid values are 'string' and 'matrix'.
pName
Name of the parameter to be written.
pVal
Value of the parameter to be written.
Description
Use in the WriteRTW method of the MATLAB S-function to write out custom parameters. These parameters are generally settings used to determine how code should be
generated in the TLC file for the S-function. See the S-function
matlabroot/toolbox/simulink/simdemos/adapt_lms.m in the Simulink model sldemo_msfcn_lms for an example.
7-144
Simulink.NumericType
Purpose |
Specify data type |
Description This class lets you specify a data type as follows:
1Create an instance of this class in the MATLAB base workspace or a model workspace. To create a numeric type in a model workspace, you must disable the Is alias option.
2Set object properties to the properties of the custom data type.
3Assign the data type to all signals and parameters of your model that you want to conform to the data type.
Assigning a data type in this way allows you to change the data types of the signals and parameters in your model by changing the properties of the object that describe them. You do not have to change the model itself.
7-145

Simulink.NumericType
Property
Dialog
Box
Data type mode
Data type of this numeric type. The options are
|
Option |
Description |
|
|
Boolean |
Same as the MATLAB boolean type. |
|
|
Double |
Same as the MATLAB double type. |
|
|
Single |
Same as the MATLAB single type. |
|
|
|
|
|
7-146

Simulink.NumericType
|
Option |
Description |
|
|
Fixed-point: |
A fixed-point data type with unspecified |
|
|
unspecified |
scaling. |
|
|
scaling |
|
|
|
Fixed-point: |
A fixed-point data type with binary-point |
|
|
binary point |
scaling. |
|
|
scaling |
|
|
|
Fixed-point: |
A fixed-point data type with slope and |
|
|
slope and bias |
bias scaling. |
|
|
scaling |
|
|
|
|
|
|
Selecting a data type mode causes Simulink software to enable controls on the dialog box (see below) that apply to the mode and to disable other controls that do not apply. Selecting a fixed-point data type mode might, depending on the other dialog box options that you select, cause the model to run only on systems that have a Simulink Fixed Point option installed.
Data type override
Data type override setting for this numeric type. The options are
|
Option |
Description |
|
|
Inherit (default) |
Data type override setting |
|
|
|
for the context in which this |
|
|
|
numeric type is used (block, |
|
|
|
signal, Stateflow chart in |
|
|
|
Simulink) applies to this |
|
|
|
numeric type. |
|
|
Off |
Data type override setting does |
|
|
|
not affect this numeric type. |
|
Is alias
If this option is selected for a workspace object of this type, Simulink software uses the name of the object as the data type for all objects that specify the object as its data type. Otherwise,
7-147

Simulink.NumericType
Simulink software uses the data type mode of the data type as its name, or, if the data type mode is a fixed-point mode, Simulink software generates a name that encodes the type’s properties, using the encoding specified by the Simulink Fixed Point product.
Data scope
Specifies whether the data type definition should be imported from, or exported to, a header file during code generation. The possible values are:
|
Value |
Action |
|
|
Auto (default) |
If no value is specified for Header file, export |
|
|
|
the type definition to model_types.h, where |
|
|
|
model is the model name. |
|
|
|
If a value is specified for Header file, import |
|
|
|
the data type definition from the specified |
|
|
|
header file. |
|
|
Exported |
Export the data type definition to a header |
|
|
|
file, which can be specified in the Header |
|
|
|
file field. If no value is specified for Header |
|
|
|
file, the header file name defaults to type.h, |
|
|
|
wheretype is the data type name. |
|
|
Imported |
Import the data type definition from a header |
|
|
|
file, which can be specified in the Header |
|
|
|
file field. If no value is specified for Header |
|
|
|
file, the header file name defaults to type.h, |
|
|
|
wheretype is the data type name. |
|
Header file
Name of a C header file from which a data type definition is imported, or to which a data type definition is exported, based on the value of Data scope. If this field is specified, the specified name is used during code generation for importing or exporting. If this field is empty, the value defaults to type.h if Data scope
7-148

Simulink.NumericType
equals Imported or Exported, or defaults to model_types.h if
Data scope equals Auto.
Description
Description of this data type. This field is intended for use in documenting this data type. Simulink software ignores it.
Signedness
Specifies whether the data type is signed or unsigned, or inherits its signedness. Set the option to Signed, Unsigned, or Auto. This option is enabled only for fixed-point data type modes.
7-149

Simulink.NumericType
Word-Length
Word length in bits of the fixed-point data type. This option is enabled only for fixed-point data type modes.
Fraction length
Number of bits to the right of the binary point. This option is enabled only if the data type mode is Fixed-point: binary
point scaling.
7-150
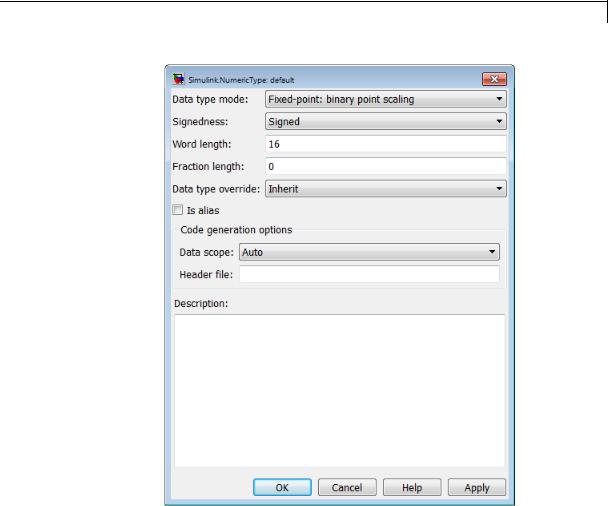
Simulink.NumericType
Slope
Slope for slope and bias scaling. data type mode is Fixed-point:
This option is enabled only if the slope and bias scaling.
7-151

Simulink.NumericType
Bias
Bias for slope and bias scaling. This option is enabled only if the data type mode is Fixed-point: slope and bias scaling. See the preceding figure.
7-152

Simulink.NumericType
Properties
|
Name |
Access |
Description |
|
|
Bias |
RW |
Bias used for slope and bias scaling of |
|
|
|
|
a fixed-point data type. This field is |
|
|
|
|
intended for use by the Simulink Fixed |
|
|
|
|
Point product. (Bias) |
|
|
DataScope |
RW |
A string specifying whether the data type |
|
|
|
|
definition should be imported from, or |
|
|
|
|
exported to, a header file during code |
|
|
|
|
generation. (Data scope) |
|
|
DataTypeMode |
RW |
String that specifies the data type |
|
|
|
|
mode of this numeric type. Valid |
|
|
|
|
values are 'Double', 'Boolean', |
|
|
|
|
'Single', 'Fixed-point: unspecified |
|
|
|
|
scaling', 'Fixed-point: binary |
|
|
|
|
point scaling', and 'Fixed-point: |
|
|
|
|
slope and bias scaling'. (Data type |
|
|
|
|
mode) |
|
|
DataTypeOverride |
RW |
String that specifies the data type override |
|
|
|
|
mode. Valid values are Inherit and Off. |
|
|
|
|
(Data type override) |
|
|
Description |
RW |
Description of this data type. (Description) |
|
|
|
|
|
|
7-153

Simulink.NumericType
|
Name |
Access |
Description |
|
|
Fixedexponent |
RW |
Exponent used for binary point scaling. |
|
|
|
|
This property equals -FractionLength. |
|
|
|
|
Setting this property causes Simulink |
|
|
|
|
software to set the FractionLength and |
|
|
|
|
Slope properties accordingly, and vice |
|
|
|
|
versa. This property applies only if the |
|
|
|
|
DataTypeMode is Fixed-point: binary |
|
|
|
|
point scaling or Fixed-point: slope |
|
|
|
|
and bias scaling. It does not appear on |
|
|
|
|
the object’s Property dialog box, but can |
|
|
|
|
be accessed from the MATLAB command |
|
|
|
|
prompt. |
|
|
FractionLength |
RW |
Integer that specifies the size in |
|
|
|
|
bits of the fractional portion of the |
|
|
|
|
fixed-point number. This property equals |
|
|
|
|
-Fixedexponent. Setting this property |
|
|
|
|
causes Simulink software to set the |
|
|
|
|
Fixedexponent property accordingly, and |
|
|
|
|
vice versa. This field is intended for use |
|
|
|
|
by the Simulink Fixed Point product. |
|
|
|
|
(Fraction length) |
|
|
HeaderFile |
RW |
A string that specifies the name of a |
|
|
|
|
C header file from which a data type |
|
|
|
|
definition is imported, or to which a data |
|
|
|
|
type definition is exported, during code |
|
|
|
|
generation. (Header file) |
|
|
IsAlias |
RW |
Integer that specifies whether to use the |
|
|
|
|
name of this object as the name of the data |
|
|
|
|
type that it specifies. Valid values are 1 |
|
|
|
|
(yes) or 0 (no). (Is alias) |
|
7-154
Simulink.NumericType
|
Name |
Access |
Description |
|
|
Signedness |
RW |
Boolean that specifies whether this data |
|
|
|
|
type is signed, unsigned, or inherits its |
|
|
|
|
signedness. Valid values are 1 (signed), 0 |
|
|
|
|
(unsigned), or Auto (inherit signedness). |
|
|
|
|
(Signedness) |
|
|
Slope |
RW |
Slope for slope and bias scaling of |
|
|
|
|
fixed-point numbers. This property |
|
|
|
|
equals SlopeAdjustmentFactor |
|
|
|
|
* 2^Fixedexponent. If |
|
|
|
|
SlopeAdjustmentFactor is 1.0, Simulink |
|
|
|
|
software displays the value of this field as |
|
|
|
|
2^SlopeAdjustmentFactor. Otherwise, |
|
|
|
|
it displays it as a numeric value. |
|
|
|
|
Setting this property causes Simulink |
|
|
|
|
software to set the Fixedexponent and |
|
|
|
|
SlopeAdjustmentFactor properties |
|
|
|
|
accordingly, and vice versa. This |
|
|
|
|
property appears only if DataTypeMode |
|
|
|
|
is Fixed-point: slope and bias |
|
|
|
|
scaling. (Slope) |
|
|
SlopeAdjustmentFactor |
RW |
Slope for slope and bias scaling of |
|
|
|
|
fixed-point numbers. Setting this property |
|
|
|
|
causes Simulink software to adjust the |
|
|
|
|
Slope property accordingly, and vice |
|
|
|
|
versa. This property applies only if |
|
|
|
|
DataTypeMode is Fixed-point: slope |
|
|
|
|
and bias scaling. It does not appear on |
|
|
|
|
the object’s Property dialog box, but can |
|
|
|
|
be accessed from the MATLAB command |
|
|
|
|
prompt. |
|
|
WordLength |
RW |
Integer that specifies the word size of this |
|
|
|
|
data type. This field is intended for use by |
|
|
|
|
the Simulink Fixed Point product. This |
|
|
|
|
|
|
7-155

Simulink.NumericType
Name
Methods
Name
isboolean
isdouble
isfixed
isfloat
Access Description
property appears only if DataTypeMode is Fixed-point. (Word Length)
Description
Determine whether data type is Boolean
Returns 1 when the DataTypeMode is 'Boolean', 0 otherwise.
Determine whether data type is double precision
Returns 1 when the DataTypeMode is 'Double', 0 otherwise.
Determine whether data type is fixed point
Returns 1 when the DataTypeMode is any of the fixed-point options, 0 otherwise. The fixed-point options are:
•'Fixed-point: unspecified scaling'
•'Fixed-point: binary point scaling'
•'Fixed-point: slope and bias scaling'
Determine whether data type is floating point
Returns 1 when the DataTypeMode is
'Double' or 'Single', 0 otherwise.
7-156

Simulink.NumericType
|
Name |
Description |
|
|
isscalingbinarypoint |
Determine whether data type has binary |
|
|
|
point scaling |
|
|
|
Returns 1 when the data type has binary |
|
|
|
point scaling or trivial slope and bias |
|
|
|
scaling, 0 otherwise. Slope and bias scaling |
|
|
|
is trivial when the slope is an integer power |
|
|
|
of two and the bias is zero. |
|
|
|
DataTypeMode is 'Fixed-point: binary |
|
|
|
point scaling' |
|
|
isscalingslopebias |
Determine whether data type has nontrivial |
|
|
|
slope and bias scaling |
|
|
|
Returns 1 when the data type has nontrivial |
|
|
|
slope and bias scaling, 0 otherwise. Slope |
|
|
|
and bias scaling is trivial when the slope is |
|
|
|
an integer power of two and the bias is zero. |
|
|
|
DataTypeMode is 'Fixed-point: slope |
|
|
|
and bias scaling' |
|
|
isscalingunspecified |
Determine whether data type has |
|
|
|
unspecified scaling |
|
|
|
Returns 1 when the data type is fixed point |
|
|
|
and its scaling has not been specified, 0 |
|
|
|
otherwise. |
|
|
|
DataTypeMode is 'Fixed-point: |
|
|
|
unspecified scaling' |
|
|
issingle |
Determine whether data type is |
|
|
|
single-precision |
|
|
|
Returns 1 when the DataTypeMode is |
|
|
|
'Single', 0 otherwise. |
|
7-157

Simulink.NumericType
See Also |
“Generate Code Including User-Defined Data Types” in the Embedded |
|
Coder documentation |
7-158

Simulink.Parameter
Purpose |
Specify value, value range, data type, and other properties of block |
|
parameter |
Description |
This class enables you to create workspace objects that you can then |
|
use as the values of block parameters, (for example, the value of the |
|
Gain parameter of a Gain block. You can create a Simulink.Parameter |
|
object in the base MATLAB workspace or a model workspace. However, |
|
to create the object in a model workspace, you must set the object |
|
storage class to Auto. |
|
Parameter objects let you specify not only the value of a parameter |
|
but also other information about the parameter, such as the |
|
parameter’s purpose, its dimensions, or its minimum and maximum |
|
values. Some Simulink products use this information. For example, |
|
Simulink and Simulink Coder products use information specified by |
|
Simulink.Parameter objects to determine whether the parameter is |
|
tunable (see “Tunable Parameters” in Simulink User’s Guide). |
|
Simulink performs range checking of parameter values. The software |
|
alerts you when the parameter object value lies outside a range that |
|
corresponds to its specified minimum and maximum values and data |
|
type. |
|
You can use the Simulink.Parameter dialog box to define a |
|
Simulink.Parameter object. To open the dialog box, in the Model |
|
Explorer, select the base workspace or a model workspace and select |
|
Add > Simulink Parameter. |
7-159

Simulink.Parameter
Property
Dialog
Box
Value
Value of the parameter. You can use MATLAB expressions to specify the numeric type, dimensions, and data type of the parameter (see “Data Types Supported by Simulink”). You can also specify fixed-point values for block parameters (see
“Specifying Fixed-Point Values Directly” in the Simulink Fixed Point documentation). The following examples illustrate this syntax.
7-160

Simulink.Parameter
|
Expression |
Description |
|
|
single(1.0) |
Specifies a single-precision value of |
|
|
|
1.0 |
|
|
int8(2) |
Specifies an 8-bit integer of value 2 |
|
|
int32(3+2i) |
Specifies a complex value whose |
|
|
|
real and imaginary parts are 32-bit |
|
|
|
integers |
|
|
fi(2.3,true,16,3) |
Specifies a signed fixed-point numeric |
|
|
|
object having a value of 2.3, a word |
|
|
|
length of 16 bits, and a fraction length |
|
|
|
of 3. |
|
|
struct('A',20,'B',5) |
Specifies a structure for a bus with two |
|
|
|
signals, A and B, with double-precision |
|
|
|
values of 20 and 5, respectively. |
|
|
|
The shape and attributes of the |
|
|
|
structure must match the shape and |
|
|
|
attributes of the elements in the bus. |
|
|
|
For information about specifying |
|
|
|
an initial condition structure, see |
|
|
|
“Specify Initial Conditions for Bus |
|
|
|
Signals”. |
|
Note Specifying a typed expression as the Value property of the parameter object overrides the current setting of the Data type property.
If Value evaluates to a MATLAB structure, then in the
Configuration Parameters > Diagnostics > Data Validity pane, set “Underspecified initialization detection” to simplified.
7-161

Simulink.Parameter
Data type
Data type of the parameter. You can either select a data type from the adjacent pulldown menu or enter a string. If you select auto (the default), the block that references the parameter object determines the data type of the variable used to represent this parameter in code generated from the model. If you enter a string, it must evaluate to one of the following:
•A built-in data type that Simulink supports (see “Data Types Supported by Simulink” ).
•A Simulink.NumericType object
•A Simulink.AliasType object
•A Simulink.Bus object (using the Bus: <object name> option)
You can use the Bus Editor to define or edit a Simulink.Parameter object with a bus object for its data type. Use one of these approaches:
—Select the File > Create/Edit a Simulink.Parameter object menu item.
—Click the Create/Edit a Simulink.Parameter object icon ( ) from the toolbar.
) from the toolbar.
You can then edit the Simulink.Parameter object in the MATLAB Editor and evaluate the code to create or update the values for this Simulink.Parameter object.
Click the Show data type assistant button  to display the Data Type Assistant, which helps you set the Data type parameter. (See “Specify Data Types Using Data Type Assistant” in Simulink User’s Guide.)
to display the Data Type Assistant, which helps you set the Data type parameter. (See “Specify Data Types Using Data Type Assistant” in Simulink User’s Guide.)
7-162

Simulink.Parameter
Note If you specify a parameter object data type using the Data type property, it overrides any typed expression in the Value property and changes the value to be untyped.
Units
Measurement units in which this value is expressed (for example, inches). This field is intended for use in documenting this parameter. Simulink ignores it.
Dimensions
Dimensions of the parameter. Simulink determines the dimensions from the entry in the Value field of this parameter. You cannot set this field yourself.
Complexity
Numeric type (i.e., real or complex) of the parameter. Simulink determines the numeric type of this parameter from the entry in the Value field of this parameter. You cannot set this field yourself.
Minimum
Minimum value that the parameter can have. The default value is [] (unspecified). Specify a finite, real, double, scalar value.
Note If you specify a bus object as the data type for a parameter, do not set the minimum value for bus data on the parameter property dialog box. Simulink ignores this setting. Instead, set the minimum values for bus elements of the bus object specified as the data type. For information on the Minimum property of a bus element, see Simulink.BusElement.
Simulink generates a warning if the parameter value is less than the minimum value or if the minimum value is outside the
7-163

Simulink.Parameter
range of the parameter data type. When updating the diagram or starting a simulation, Simulink generates an error in these cases.
Maximum
Maximum value that the parameter can have. The default value is [] (unspecified). Specify a finite, real, double, scalar value.
Note If you specify a bus object as the data type for a parameter, do not set the maximum value for bus data on the parameter property dialog box. Simulink ignores this setting. Instead, set the maximum values for bus elements of the bus object specified as the data type. For information on the Maximum property of a bus element, see Simulink.BusElement.
Simulink generates a warning if the parameter value is greater than the maximum value or if the maximum value is outside the range of the parameter data type. When updating the diagram or starting a simulation, Simulink generates an error in these cases.
Storage class
Storage class of this parameter. Simulink code generation products use this property to allocate memory for this parameter in generate code. For more information, see “Tunable Parameter Storage Classes”.
Alias
Alternate name for this parameter. Simulink ignores this setting.
Alignment
Data alignment boundary, specified in number of bytes. The starting memory address for the data allocated for the parameter will be a multiple of the Alignment setting. The default value is -1, which specifies that the code generator should determine an optimal alignment based on usage. Otherwise, specify a positive integer that is a power of 2, not exceeding 128. This field is intended for use by Simulink Coder software (see “Configure Data
7-164
Simulink.Parameter
Properties
Alignment for Function Implementations”). Simulink software ignores this setting.
Description
Description of this parameter. This field is intended for use in documenting this parameter. Simulink ignores it.
|
Name |
Access |
Description |
|
|
Value |
RW |
Value of this parameter. (Value) |
|
|
CoderInfo |
RW |
Information used by Simulink Coder |
|
|
|
|
software for generating code for this |
|
|
|
|
parameter. The value of this property is |
|
|
|
|
an object of Simulink.ParamCoderInfo |
|
|
|
|
class. |
|
|
Description |
RW |
String that describes this parameter. |
|
|
|
|
This property is intended for user |
|
|
|
|
use. Simulink itself does not use it. |
|
|
|
|
(Description) |
|
|
DataType |
RW |
String specifying the data type of this |
|
|
|
|
parameter. (Data type) |
|
|
Min |
RW |
Minimum value that this parameter can |
|
|
|
|
have. (Minimum) |
|
|
Max |
RW |
Maximum value that this parameter can |
|
|
|
|
have. (Maximum) |
|
|
DocUnits |
RW |
Measurement units in which this |
|
|
|
|
parameter’s value is expressed. (Units) |
|
|
Complexity |
RO |
String specifying the numeric type of this |
|
|
|
|
parameter. Valid values are 'real’ or |
|
|
|
|
'complex'. (Complexity) |
|
|
Dimensions |
RO |
Vector specifying the dimensions of this |
|
|
|
|
parameter. (Dimensions) |
|
7-165

Simulink.ParamCoderInfo
Purpose
Description
Property
Dialog
Box
Properties
Specify information needed to generate code for parameter
Simulink software creates an instance of this class for each instance of a Simulink.Parameter object that it creates. Simulink software uses the Simulink.ParamCoderInfo object to store information needed to generate code for the parameter specified by the Simulink.Parameter object.
You can set the properties of an instance of this class via the CoderInfo property or the property dialog box of the Simulink.Parameter object that uses it. For example, the following MATLAB expression sets the
StorageClass property of a Simulink.ParamCoderInfo object used by a parameter object name myparam.
myparam.CoderInfo.StorageClass = 'exportedGlobal';
Use the Code Generation Options section of the Simulink.Parameter property dialog box to set the StorageClass, Alias, and Alignment properties of objects of this class.
|
Name |
Description |
|
|
Alias |
Alternate name for this parameter. |
|
|
Alignment |
Data alignment boundary for this parameter. |
|
|
|
See “Configure Data Alignment for Function |
|
|
|
Implementations” in the Embedded Coder |
|
|
|
documentation for more information. |
|
|
CustomAttributes |
Custom storage class attributes of this |
|
|
|
parameter. See “Introduction to Custom |
|
|
|
Storage Classes” in the Embedded Coder |
|
|
|
documentation for more information. |
|
7-166

Simulink.ParamCoderInfo
|
Name |
Description |
|
|
CustomStorageClass |
Custom storage class of this parameter. |
|
|
StorageClass |
Storage class of this parameter. For more |
|
|
|
information, see “Parameters” in the Simulink |
|
|
|
Coder documentation. |
|
7-167

Simulink.RunTimeBlock
Purpose
Description
Parent
Class
Derived
Classes
Property
Summary
Allow Level-2 MATLAB S-function and other MATLAB programs to get information about block while simulation is running
This class allows a Level-2 MATLAB S-function or other MATLAB program to obtain information about a block. Simulink software creates an instance of this class or a derived class for each block in a model. Simulink software passes the object to the callback methods of Level-2 MATLAB S-functions when it updates or simulates a model, allowing the callback methods to get block-related information from and provide such information to Simulink software. See “Write Level-2 MATLAB S-Functions” in Writing S-Functions for more information. You can also use instances of this class in MATLAB programs to obtain information about blocks during a simulation. See “Access Block Data During Simulation” for more information.
Note Simulink.RunTimeBlock objects do not support MATLAB sparse matrices. For example, the following line of code attempts to assign a sparse identity matrix to the run-time object’s output port data. This line of code in a Level-2 MATLAB S-function produces an error:
block.Outport(1).Data = speye(10);
None
Simulink.MSFcnRunTimeBlock
|
Name |
Description |
|
|
“BlockHandle” |
Block’s handle. |
|
|
“CurrentTime” |
Current simulation time. |
|
|
|
|
|
7-168

Simulink.RunTimeBlock
Method
Summary
|
Name |
Description |
|
|
“NumDworks” |
Number of discrete work vectors used by the |
|
|
|
block. |
|
|
“NumOutputPorts” |
Number of block output ports. |
|
|
“NumContStates” |
Number of block’s continuous states. |
|
|
“NumDworkDiscStates” |
Number of block’s discrete states |
|
|
“NumDialogPrms” |
Number of parameters that can be entered |
|
|
|
on S-function block’s dialog box. |
|
|
“NumInputPorts” |
Number of block’s input ports. |
|
|
“NumRuntimePrms” |
Number of run-time parameters used by |
|
|
|
block. |
|
|
“SampleTimes” |
Sample times at which block produces |
|
|
|
outputs. |
|
|
Name |
Description |
|
|
“ContStates” |
Get a block’s continuous states. |
|
|
“DataTypeIsFixedPoint” |
Determine whether a data type is |
|
|
|
fixed point. |
|
|
“DatatypeName” |
Get name of a data type supported |
|
|
|
by this block. |
|
|
“DatatypeSize” |
Get size of a data type supported by |
|
|
|
this block. |
|
|
“Derivatives” |
Get a block’s continuous state |
|
|
|
derivatives. |
|
|
“DialogPrm” |
Get a parameter entered on an |
|
|
|
S-function block’s dialog box. |
|
|
“Dwork” |
Get one of a block’s DWork vectors. |
|
|
|
|
|
7-169

Simulink.RunTimeBlock
|
Name |
Description |
|
|
“FixedPointNumericType” |
Determine the properties of a |
|
|
|
fixed-point data type. |
|
|
“InputPort” |
Get one of a block’s input ports. |
|
|
“OutputPort” |
Get one of a block’s output ports. |
|
|
“RuntimePrm” |
Get one of the run-time parameters |
|
|
|
used by a block. |
|
Properties
BlockHandle
Description
Block’s handle.
Access
RO
CurrentTime
Description
Current simulation time.
Access
RO
NumDworks
Description
Number of data work vectors.
Access
RW
See Also ssGetNumDWork
7-170

Simulink.RunTimeBlock
NumOutputPorts
Description
Number of output ports.
Access
RW
See Also
ssGetNumOutputPorts
NumContStates
Description
Number of continuous states.
Access
RW
See Also
ssGetNumContStates
NumDworkDiscStates
Description
Number of discrete states. In a MATLAB S-function, you need to use DWorks to set up discrete states.
Access
RW
See Also
ssGetNumDiscStates
NumDialogPrms
Description
Number of parameters declared on the block’s dialog. In the case of the S-function, it returns the number of parameters listed as a comma-separated list in the S-function parameters dialog field.
7-171

Simulink.RunTimeBlock
Access
RW
See Also
ssGetNumSFcnParams
NumInputPorts
Description
Number of input ports.
Access
RW
See Also
ssGetNumInputPorts
NumRuntimePrms
Description
Number of run-time parameters used by this block. See “Run-Time Parameters” for more information.
Access
RW
See Also
ssGetNumSFcnParams
SampleTimes
Description
Block’s sample times.
Access
RW for MATLAB S-functions, RO for all other blocks.
7-172

Simulink.RunTimeBlock
Methods
ContStates
Purpose
Get a block’s continuous states.
Syntax
states = ContStates();
Description
Get vector of continuous states.
See Also
ssGetContStates
DataTypeIsFixedPoint
Purpose
Determine whether a data type is fixed point.
Syntax
bVal = DataTypeIsFixedPoint(dtID);
Arguments
dtID
Integer value specifying the ID of a data type.
Description
Returns true if the specified data type is a fixed-point data type.
DatatypeName
Purpose
Get the name of a data type.
Syntax
name = DatatypeName(dtID);
Arguments
dtID
7-173

Simulink.RunTimeBlock
Integer value specifying ID of a data type.
Description
Returns the name of the data type specified by dtID.
See Also
“DatatypeSize”
DatatypeSize
Purpose
Get the size of a data type.
Syntax
size = DatatypeSize(dtID);
Arguments
dtID
Integer value specifying the ID of a data type.
Description
Returns the size of the data type specified by dtID.
See Also
“DatatypeName”
Derivatives
Purpose
Get derivatives of a block’s continuous states.
Syntax
derivs = Derivatives();
Description
Get vector of state derivatives.
See Also
ssGetdX
7-174
Simulink.RunTimeBlock
DialogPrm
Purpose
Get an S-function’s dialog parameters.
Syntax
param = DialogPrm(pIdx);
Arguments
pIdx
Integer value specifying the index of the parameter to be returned.
Description
Get the specified dialog parameter. In the case of the S-function, each DialogPrm corresponds to one of the elements in the comma-separated list of parameters in the S-function parameters dialog field.
See Also
ssGetSFcnParam, “RuntimePrm”
Dwork
Purpose
Get one of a block’s DWork vectors.
Syntax
dworkObj = Dwork(dwIdx);
Arguments
dwIdx
Integer value specifying the index of a work vector.
Description
Get information about the DWork vector specified by dwIdx where dwIdx is the index number of the work vector. This method returns an
object of type Simulink.BlockCompDworkData.
7-175

Simulink.RunTimeBlock
See Also
ssGetDWork
FixedPointNumericType
Purpose
Get the properties of a fixed-point data type.
Syntax
eno = FixedPointNumericType(dtID);
Arguments
dtID
Integer value specifying the ID of a fixed-point data type.
Description
Returns an object of embedded.Numeric class that contains the attributes of the specified fixed-point data type.
Note embedded.Numeric is also the class of the numerictype objects created by Fixed-Point Toolbox software. For information on the properties defined by embedded.Numeric class, see numerictype Object Properties.
InputPort
Purpose
Get an input port of a block.
Syntax
port = InputPort(pIdx);
Arguments
pIdx
Integer value specifying the index of an input port.
7-176

Simulink.RunTimeBlock
Description
Get the input port specified by pIdx, where pIdx is the index number of the input port. For example,
port = rto.InputPort(1)
returns the first input port of the block represented by the run-time object rto.
This method returns an object of type
Simulink.BlockPreCompInputPortData or Simulink.BlockCompInputPortData, depending on whether the model that contains the port is uncompiled or compiled. You can use this object to get and set the input port’s uncompiled or compiled properties, respectively.
See Also
ssGetInputPortSignalPtrs, Simulink.BlockPreCompInputPortData, Simulink.BlockCompInputPortData, “OutputPort”
OutputPort
Purpose
Get an output port of a block.
Syntax
port = OutputPort(pIdx);
Arguments
pIdx
Integer value specifying the index of an output port.
Description
Get the output port specified by pIdx, where pIdx is the index number of the output port. For example,
port = rto.InputPort(1)
7-177

Simulink.RunTimeBlock
returns the first output port of the block represented by the run-time object rto.
This method returns an object of type
Simulink.BlockPreCompOutputPortData or Simulink.BlockCompOutputPortData, depending on whether the model that contains the port is uncompiled or compiled, respectively. You can use this object to get and set the output port’s uncompiled or compiled properties, respectively.
See Also ssGetInputPortSignalPtrs,
Simulink.BlockPreCompOutputPortData, Simulink.BlockCompOutputPortData
RuntimePrm
Purpose
Get an S-function’s run-time parameters.
Syntax
param = RuntimePrm(pIdx);
Arguments
pIdx
Integer value specifying the index of a run-time parameter.
Description
Get the run-time parameter whose index is pIdx.
See Also
ssGetRunTimeParamInfo
7-178

Simulink.SampleTime
Purpose |
Object containing sample time information |
Description The SampleTime class represents the sample time information associated with an individual sample time.
Use the methods Simulink.Block.getSampleTimes and
Simulink.BlockDiagram.getSampleTimes to retrieve the values of the
SampleTime properties for a block and for a block diagram, respectively.
Properties Value
A two-element array of doubles that contains the period and offset of the sample time
Description
A character string that describes the sample time type
ColorRGBValue
A 1x3 array of doubles that contains the red, green and blue (RGB) values of the sample time color
Annotation
A character string that represents the annotation of a specific sample time (for example, ’D1’)
OwnerBlock
For asynchronous and variable sample times, OwnerBlock is a string containing the full path to the block that controls the sample time. For all other types of sample times, it is an empty string.
ComponentSampleTimes
If the sample time is an async union or if the sample time is hybrid and the component sample times are available, then the array ComponentSampleTimes contains Simulink.SampleTime objects.
7-179

Simulink.SampleTime
Copy |
Value. To learn how value classes affect copy operations, see Copying |
Semantics |
Objects in the MATLAB Programming Fundamentals documentation. |
Examples |
Retrieve the sample time information for the ’vdp’ model. |
|
ts = Simulink.BlockDiagram.getSampleTimes('vdp') |
|
Simulink returns: |
|
ts = |
|
1x2 Simulink.SampleTime |
|
Package: Simulink |
|
Properties: |
|
Value |
|
Description |
|
ColorRGBValue |
|
Annotation |
|
OwnerBlock |
|
ComponentSampleTimes |
|
Methods |
|
To examine the values of the properties: |
|
ts(1), ts(2) |
|
ans = |
|
Simulink.SampleTime |
|
Package: Simulink |
|
Properties: |
Value: |
[0 |
0] |
Description: |
'Continuous' |
|
ColorRGBValue: |
[0 |
0 0] |
Annotation: |
'Cont' |
|
7-180

Simulink.SampleTime
OwnerBlock: []
ComponentSampleTimes: {}
Methods
ans =
Simulink.SampleTime
Package: Simulink
Properties:
Value: [Inf 0]
Description: 'Constant'
ColorRGBValue: [1 0.2600 0.8200]
Annotation: 'Inf'
OwnerBlock: []
ComponentSampleTimes: {}
Methods
See Also Simulink.Block.getSampleTimes |
Simulink.BlockDiagram.getSampleTimes
7-181

Simulink.ScopeDataLogs
Purpose |
Store data logged by Scope signal viewer |
Description
Note The Simulink.ScopeDataLogs class is used in conjunction with the ModelDataLogs logging data format. The ModelDataLogs format is supported for backwards compatibility. The ModelDataLogs format will be removed in a future release.
For new models, use the Dataset logging format. If you use the Dataset format for signal logging, then Simulink does not log the signals configured to be logged in the Signal Viewer. Explicitly mark the signal for signal logging by using the Signal Properties dialog box. To access the Signal Properties dialog box, right-click a signal and from the context menu, select Properties.
Simulink software creates instances of this class to log data displayed on Scope viewers (see “Visualize Results”). In particular, if you have enabled data logging for a model, Simulink software creates an instance of this class for each scope viewer enabled for logging in the model and assigns it to a property of the model’s Simulink.ModelDataLogs object. The instance created for each viewer has a Name property whose value is the name specified on the History pane of the viewer’s parameter dialog box (see Scope for more information). The instance also has an axes property for each of the scope’s axes labeled Axes1, Axes2, etc. The value of each axes property is itself a Simulink.ScopeDataLogs object that contains Simulink.Timeseries objects, one for each signal displayed on the axes. The time series objects contain the signal data displayed on the axes.
7-182

Simulink.ScopeDataLogs
Consider, for example, the following model:
This model displays signals out1 and out2 on a scope viewer that has only one set of axes.
7-183

Simulink.ScopeDataLogs
The model enables data logging for the scope viewer under the variable name ScopeData and for the model as a whole under the default variable name logsout.
7-184
Simulink.ScopeDataLogs
After simulation of the model, the MATLAB workspace contains a Simulink.ModelDataLogs object named logsout containing a Simulink.ScopeDataLogs object that in turn contains a
Simulink.ScopeDataLogs object that contains Simulink.Timeseries objects that contain the times series data for signals out1 and out 2.
You can use Simulink data object dot notation to access the data, e.g.,
>> logsout.ScopeData.axes1
ans = |
|
|
Simulink.ScopeDataLogs (axes1): |
|
|
Name |
elements |
Simulink Class |
out1 |
1 |
Timeseries |
out2 |
1 |
Timeseries |
See Also “Signal Logging”, Simulink.ModelDataLogs, Simulink.SubsysDataLogs, Simulink.Timeseries, Simulink.TsArray, Simulink.SimulationData.Dataset, who, whos, unpack
7-185

Simulink.sdi.DiffRunResult
Purpose |
Results from comparing two simulation runs |
Description The Simulink.sdi.DiffRunResult class manages the results from comparing two simulation runs. A Simulink.sdi.DiffRunResult object contains a Simulink.sdi.DiffSignalResult object for each signal compared.
Construction The function Simulink.sdi.compareRuns returns a handle to a
Simulink.sdi.DiffRunResult object.
Properties runID1
Run ID, a unique number identifying the first run compared.
runID2
Run ID, a unique number identifying the second run compared.
count
Number of compared signal results.
matlabVersion
Version of MATLAB used to create an instance of
Simulink.sdi.DiffRunResult.
dateCreated
Date of object creation, stored in serial date number format.
Methods
Copy
Semantics
Examples
getResultByIndex |
Return signal comparison result, |
|
object |
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
The function Simulink.sdi.compareRuns returns a Simulink.sdi.DiffRunResult object containing the results
7-186

Simulink.sdi.DiffRunResult
of the comparison. The Simulink.sdi.DiffRunResult object contains a Simulink.sdi.DiffSignalResult object for each signal comparison between the two simulation runs.
% Configure model "sldemo_f14" for logging and simulate
set_param('sldemo_f14/Pilot','WaveForm','square');
simOut = sim('sldemo_f14', 'SaveOutput','on', ...
'SaveFormat', 'StructureWithTime', ...
'ReturnWorkspaceOutputs', 'on');
%Create a Simulation Data Inspector run, Simulink.sdi.Run, from simO runID1 = Simulink.sdi.createRun('First Run','namevalue',{'simOut'},{s
%Simulate again
set_param('sldemo_f14/Pilot','WaveForm','sawtooth');
simOut = sim('sldemo_f14', 'SaveOutput','on', ...
'SaveFormat', 'StructureWithTime', ...
'ReturnWorkspaceOutputs', 'on');
% Create another Simulation Data Inspector run
runID2 = Simulink.sdi.createRun('Second Run','namevalue',{'simOut'},{
%Compare two runs and get an instance of Simulink.sdi.DiffRunResult diff = Simulink.sdi.compareRuns(runID1, runID2);
%Get the number of signal comparison results
count = diff.count;
% Iterate over |
results and find out if signals match |
|
for i=1:count |
|
|
% Get the |
Simulink.sdi.DiffSignalResult, diffSignal |
|
diffSignal |
= |
diff.getResultByIndex(i); |
signalID1 |
= |
diffSignal.signalID1; |
signalID2 |
|
= diffSignal.signalID2; |
match |
|
= diffSignal.match; |
if match
7-187

Simulink.sdi.DiffRunResult
disp([num2str(signalID1) ' and ' num2str(signalID2)...
' match']);
else
disp([num2str(signalID1) ' and ' num2str(signalID2)...
' don''t match']);
end
end
See Also Simulink.sdi.createRun | Simulink.sdi.compareRuns |
Simulink.sdi.DiffSignalResult
How To |
• “Record and Inspect Signal Data Programmatically” |
7-188

Simulink.sdi.DiffRunResult.getResultByIndex
Purpose |
Return signal comparison result, Simulink.sdi.DiffSignalResult |
|
object |
Syntax |
diffSignalObj = diffRunObj.getResultByIndex(index) |
Description |
diffSignalObj = diffRunObj.getResultByIndex(index) returns |
|
the Simulink.sdi.DiffSignalResult object, diffSignalObj, which |
|
contains the comparison results for a signal. diffRunObj is an instance |
|
of a Simulink.sdi.DiffRunResult class, which contains an array |
|
of signal comparison results, where each element is an instance of a |
|
Simulink.sdi.DiffSignalResult class. |
Input |
index |
Arguments |
An index to the array of Simulink.sdi.DiffSignalResult |
|
objects contained in a Simulink.sdi.DiffRunResult object. |
Output |
diffSignalObj |
Arguments |
Handle to a Simulink.sdi.DiffSignalResult object |
|
representing the results of comparing two signals between |
|
simulation runs. |
Examples |
The function Simulink.sdi.compareRuns returns a |
|
Simulink.sdi.DiffRunResult object containing the results |
|
of the comparison. The Simulink.sdi.DiffRunResult object contains |
|
a Simulink.sdi.DiffSignalResult object for each signal comparison |
|
between the two simulation runs. diff.getResultByIndex returns the |
|
Simulink.sdi.DiffSignalResult object for each signal comparison. |
|
% Configure model "sldemo_f14" for logging and simulate |
|
set_param('sldemo_f14/Pilot','WaveForm','square'); |
|
simOut = sim('sldemo_f14', 'SaveOutput','on', ... |
|
'SaveFormat', 'StructureWithTime', ... |
|
'ReturnWorkspaceOutputs', 'on'); |
|
% Create a Simulation Data Inspector run, Simulink.sdi.Run, from simO |
7-189

Simulink.sdi.DiffRunResult.getResultByIndex
|
runID1 = Simulink.sdi.createRun('First Run','namevalue',{'simOut'},{simOu |
|
|
% Simulate again |
|
|
set_param('sldemo_f14/Pilot','WaveForm','sawtooth'); |
|
|
simOut = sim('sldemo_f14', 'SaveOutput','on', ... |
|
|
|
'SaveFormat', 'StructureWithTime', ... |
|
|
'ReturnWorkspaceOutputs', 'on'); |
|
% Create another Data Inspector run and get signal IDs |
|
|
runID2 = Simulink.sdi.createRun('Second Run','namevalue',{'simOut'},{simO |
|
|
% Compare two runs and get an instance of Simulink.sdi.DiffRunResult |
|
|
diff = Simulink.sdi.compareRuns(runID1, runID2); |
|
|
% Get the number of signal comparison results |
|
|
count = diff.count; |
|
|
% Iterate over results and display the comparison results |
|
|
for i=1:count |
|
|
diffSignal |
= diff.getResultByIndex(i); |
|
signalID1 |
= diffSignal.signalID1; |
|
signalID2 |
= diffSignal.signalID2; |
|
match |
= diffSignal.match; |
|
if match |
|
|
disp([num2str(signalID1) ' and ' num2str(signalID2)... |
|
|
' match']); |
|
|
else |
|
|
disp([num2str(signalID1) ' and ' num2str(signalID2)... |
|
|
' don''t match']); |
|
|
end |
|
|
end |
|
See Also |
Simulink.sdi.Run | Simulink.sdi.Signal | |
|
|
Simulink.sdi.DiffRunResult | Simulink.sdi.DiffSignalResult |
|
|
| Simulink.sdi.compareRuns |
|
7-190

Simulink.sdi.DiffRunResult.getResultByIndex
How To |
• “Record and Inspect Signal Data Programmatically” |
7-191

Simulink.sdi.DiffSignalResult
Purpose |
Results from comparing two signals |
Description |
The Simulink.sdi.DiffSignalResult object manages the results from |
|
comparing two signals. A Simulink.sdi.DiffSignalResult object |
|
contains the value differences of the signals, the tolerance data, and the |
|
data after any specified synchronization methods are performed. |
Construction |
The function Simulink.sdi.compareSignals returns a handle to |
|
a Simulink.sdi.DiffSignalResult object, which contains the |
|
comparison results. |
|
A Simulink.sdi.DiffSignalResult object is also created |
|
when the function Simulink.sdi.compareRuns creates a |
|
Simulink.sdi.DiffRunResult object, which in turn creates |
|
Simulink.sdi.DiffSignalResult objects. |
Properties |
signalID1 |
|
Signal ID, a unique number identifying the first signal compared. |
|
signalID2 |
|
Signal ID, a unique number identifying the second signal |
|
compared. |
|
match |
|
A boolean indicating if the two timeseries objects match |
|
according to the specified tolerance and time synchronization |
|
options. |
|
diff |
|
A MATLAB timeseries object specifying the value differences |
|
after synchronizing the two time series data. |
|
tol |
|
A MATLAB timeseries object specifying the actual absolute |
|
tolerance value at each synchronized time point. |
|
sync1 |
7-192

Simulink.sdi.DiffSignalResult
A MATLAB timeseries object specifying time series 1 after synchronization has been applied.
sync2
Copy
Semantics
Examples
See Also
A MATLAB timeseries object specifying time series 2 after synchronization has been applied.
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
In this example, a Simulink.sdi.DiffSignalResult object is created after comparing two signals in the Simulation Data Inspector.
% Configure model "sldemo_f14" for logging and simulate
simOut = sim('sldemo_f14', 'SaveOutput','on', ...
'SaveFormat', 'StructureWithTime', ...
'ReturnWorkspaceOutputs','on');
% Create a Simulation Data Inspector run and get signal IDs
[~, ~, signalIDs] = Simulink.sdi.createRun('My Run','namevalue',{'MyD
sig1 = signalIDs(1); sig2 = signalIDs(2);
%Compare two signals, which returns the results in an instance of Si diff = Simulink.sdi.compareSignals(sig1, sig2);
%Find if the signals match
match = diff.match;
% Get the tolerance used in Simulink.sdi.compareSignals tolerance = diff.tol;
Simulink.sdi.DiffRunResult | Simulink.sdi.createRun |
Simulink.sdi.compareRuns
7-193

Simulink.sdi.DiffSignalResult
How To |
• “Record and Inspect Signal Data Programmatically” |
7-194
Simulink.sdi.Run
Purpose
Description
Construction
Properties
Methods
Manages signal data and metadata of simulation run
The Simulink.sdi.Run object contains the signal logging information for one simulation run, which includes the logged signal data, a run ID, and the total number of signals in the run.
The function Simulink.sdi.createRun creates a Simulink.sdi.Run object.
dateCreated
Date and time of the run, stored as a double.
description
User-specified description of the run. The default value is an empty string.
id
Read-only unique number to identify a run.
name
User-specified name of the run. The default value is an empty string.
signalCount
Number of signals in the run.
tag
User-specified string for categorization, identification, or attaching other information to this run. The default value is an empty string.
getSignal |
Return object by signal ID |
getSignalByIndex |
Return object by index |
7-195

Simulink.sdi.Run
Copy
Semantics
Examples
getSignalIDByIndex |
Return signal ID at array index |
isValidSignalID |
Determine if signal ID is valid |
|
within run |
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
The Simulink.sdi.Run object contains a Simulink.sdi.Signal object for each logged signal. This example creates a run from simulation data in the base workspace. It demonstrates how to access the Simulink.sdi.Run object from the Simulation Data Inspector . You can select which signals to view and then open the Simulation Data Inspector tool to inspect those signals.
% Configure model "sldemo_f14" for logging and simulate
simOut = sim('sldemo_f14', 'SaveOutput','on', ...
'SaveFormat', 'StructureWithTime', ...
'ReturnWorkspaceOutputs', 'on');
%Create a Simulation Data Inspector run, Simulink.sdi.Run, from simOut i runID = Simulink.sdi.createRun('My Run', 'base', {'simOut'});
%Get the handle to the run object, Simulink.sdi.Run, corresponding to th runObj = Simulink.sdi.getRun(runID);
%Get the name of the run
runName = runObj.name;
%Get number of signals numSignals = runObj.signalCount;
%To view the all of the signals in the run, select each signal in the ru for i=1:numSignals
signalObj = runObj.getSignalByIndex(i); signalObj.checked = true;
end
7-196

Simulink.sdi.Run
% Open the Simulation Data Inspector to inspect the selected signals. Simulink.sdi.view;
See Also Simulink.sdi.createRun | Simulink.sdi.getRun |
Simulink.sdi.view
How To |
• “Record and Inspect Signal Data Programmatically” |
7-197

Simulink.sdi.Run.getSignal
Purpose |
Return Simulink.sdi.Signal object by signal ID |
Syntax |
signalObj = runObj.getSignal(signalID) |
Description |
signalObj = runObj.getSignal(signalID) returns the |
|
Simulink.sdi.Signal object, signalObj, corresponding to the signal |
|
ID, signalID, stored in the Simulink.sdi.Run object, runObj. |
Input |
signalID |
Arguments |
Signal ID, a unique number identifying a signal in a run in the |
|
Simulation Data Inspector. |
Output |
signalObj |
Arguments |
Handle to a Simulink.sdi.Signal object representing a signal in |
|
a run object, Simulink.sdi.Run. |
Examples |
The Simulink.sdi.Run method, getSignal, returns a signal object |
|
representing the signal data and metadata in a run. You can modify the |
|
signal object properties to configure the signal for plotting or comparing |
|
to other signals in the Simulation Data Inspector. |
|
% Configure model "sldemo_f14" for logging and simulate |
|
simOut = sim('sldemo_f14', 'SaveOutput','on', ... |
|
'SaveFormat', 'StructureWithTime', ... |
|
'ReturnWorkspaceOutputs', 'on'); |
|
% Create a Simulation Data Inspector run |
|
[runID,runIndex,signalIDs] = Simulink.sdi.createRun('My Run','base',{'sim |
|
% Get the Simulink.sdi.Run object corresponding to the new run ID |
|
runObj = Simulink.sdi.getRun(runID); |
|
% Get the number of signals in the run |
|
numSignals = runObj.signalCount; |
7-198

Simulink.sdi.Run.getSignal
|
% Get the Simulink.sdi.Signal objects for each signal in the run and |
|
for i = 1:numSignals |
|
signalObjs(i) = runObj.getSignal(signalIDs(i)); |
|
signalObjs(i).checked = true; |
|
end |
See Also |
Simulink.sdi.Run | Simulink.sdi.Signal | |
|
Simulink.sdi.createRun |
How To |
• “Record and Inspect Signal Data Programmatically” |
7-199

Simulink.sdi.Run.getSignalByIndex
Purpose |
Return Simulink.sdi.Signal object by index |
Syntax |
signalObj = runObj(index) |
Description |
signalObj = runObj(index) returns the Simulink.sdi.Signal |
|
object, signalObj, at the index into the array of signals contained in |
|
the Simulink.sdi.Run object, runObj. |
Input |
index |
Arguments |
Number specifying an index to the array of signals contained in a |
|
Simulink.sdi.Run object. The first index in the array is 1. |
Output |
signalObj |
Arguments |
Handle to a Simulink.sdi.Signal object representing a signal in |
|
a run object, Simulink.sdi.Run. |
Examples |
The Simulink.sdi.Run method, getSignalByIndex, returns a signal |
|
object representing the signal data and information in a run. You can |
|
modify the signal object properties to configure the signal for plotting or |
|
comparing to other signals in the Simulation Data Inspector. |
|
% Configure model "sldemo_f14" for logging and simulate |
|
simOut = sim('sldemo_f14','SaveOutput','on','SaveFormat', 'StructureWithT |
|
'ReturnWorkspaceOutputs','on'); |
|
% Create a Simulation Data Inspector run |
|
runID = Simulink.sdi.createRun('My Run','base',{'simOut'}); |
|
% Get the Simulink.sdi.Run object corresponding to the new run ID |
|
runObj = Simulink.sdi.getRun(runID); |
|
% Get the number of signals in the run |
|
numSignals = runObj.signalCount; |
|
% Get the Simulink.sdi.Signal object for the first signal in the run |
7-200

Simulink.sdi.Run.getSignalByIndex
|
if numSignals > 0 |
|
signalObj = runObj.getSignalByIndex(1); |
|
end |
See Also |
Simulink.sdi.Signal | Simulink.sdi.Run | |
|
Simulink.sdi.createRun | Simulink.sdi.getRun |
How To |
• “Record and Inspect Signal Data Programmatically” |
7-201

Simulink.sdi.Run.getSignalIDByIndex
Purpose |
Return signal ID at array index |
Syntax |
signalID = runObj.getSignalIDByIndex(index) |
Description |
signalID = runObj.getSignalIDByIndex(index) returns the signal |
|
ID for the signal at the specified index to the array of signals contained |
|
in the Simulink.sdi.Run object, runObj. |
Input |
index |
Arguments |
Number specifying the index to the array of signals contained in a |
|
Simulink.sdi.Run object. The first index in the array is 1. |
Output |
signalID |
Arguments |
Signal ID, a unique number identifying a signal in a run. |
|
|
Examples |
The Simulink.sdi.Run method, getSignalIDByIndex, returns |
|
the signal ID corresponding to a signal in a run. With the signal |
|
ID you can get the signal object representing the signal data and |
|
metadata. You can compare two signals by passing their signal IDs to |
|
Simulink.sdi.compareSignals. |
|
% Configure model "sldemo_f14" for logging and simulate |
|
simOut = sim('sldemo_f14','SaveOutput','on', ... |
|
'SaveFormat','StructureWithTime', ... |
|
'ReturnWorkspaceOutputs','on'); |
|
% Create a Simulation Data Inspector run |
|
runID = Simulink.sdi.createRun('My Run','base',{'simOut'}); |
|
% Get the Simulink.sdi.Run object corresponding to the new run ID |
|
runObj = Simulink.sdi.getRun(runID); |
|
% Get the number of signals in the run |
|
numSignals = runObj.signalCount; |
7-202

Simulink.sdi.Run.getSignalIDByIndex
% Get the signal ID for the first signal in the run if numSignals > 0
signalID = runObj.getSignalIDByIndex(1);
end
See Also Simulink.sdi.Signal | Simulink.sdi.Run |
Simulink.sdi.createRun | Simulink.sdi.getRun |
Simulink.sdi.compareSignals
How To |
• “Record and Inspect Signal Data Programmatically” |
7-203

Simulink.sdi.Run.isValidSignalID
Purpose |
Determine if signal ID is valid within run |
Syntax |
isValid = runObj.isValidSignalID(signalID) |
Description |
isValid = runObj.isValidSignalID(signalID) returns true if the |
|
signal ID, signalID, corresponds to a signal in the run object, runObj. |
|
Otherwise, it returns false. |
Input |
signalID |
Arguments |
Signal ID, a unique number identifying a signal stored in the |
|
run object. |
Output |
isValid |
Arguments |
A Boolean value: true, if the signal exists; false, otherwise. |
|
|
Examples |
Before calling a function that takes a signal ID as input, verify that |
|
the signal ID is valid. |
|
% Configure model "sldemo_f14" for logging and simulate |
|
simOut = sim('sldemo_f14','SaveOutput','on', ... |
|
'SaveFormat','StructureWithTime', ... |
|
'ReturnWorkspaceOutputs','on'); |
|
% Create a Simulation Data Inspector run |
|
runID = Simulink.sdi.createRun('My Run','base',{'simOut'}); |
|
% Get the Simulink.sdi.Run object corresponding to the new run ID |
|
runObj = Simulink.sdi.getRun(runID); |
|
% Get the number of signals in the run |
|
numSignals = runObj.signalCount; |
|
% Get the signal ID for the first signal in the run |
|
if numSignals > 0 |
|
signalID = runObj.getSignalIDByIndex(1); |
7-204
Simulink.sdi.Run.isValidSignalID
end
% Before calling getSignal, check that the signalID is valid if runObj.isValidSignalID(signalID)
signalObj = runObj.getSignal(signalID)
end
See Also Simulink.sdi.Signal | Simulink.sdi.Run |
Simulink.sdi.createRun | Simulink.sdi.getRun
| Simulink.sdi.Run.getSignalByIndex |
Simulink.sdi.Run.isValidSignalID | Simulink.sdi.Run.getSignal
How To |
• “Record and Inspect Signal Data Programmatically” |
7-205

Simulink.sdi.Signal
Purpose |
Manages signal time series data and metadata |
Description |
The Simulink.sdi.Signal object contains the signal logging |
|
information for one simulation run. It also contains properties for |
|
visualizing and comparing signals. |
Construction |
The function Simulink.sdi.createRun creates a Simulink.sdi.Run |
|
object, which creates a Simulink.sdi.Signal object for each signal |
|
in the simulation output. |
Properties |
Signal Properties (read only) |
|
id |
|
Signal ID, a unique number identifying the signal. |
|
runID |
|
Run ID, a unique number identifying the signal’s parent run. |
|
rootSource |
|
String to access the high-level logging structure this signal was |
|
derived from. |
|
timeSource |
|
String to access the logged signal’s time vector. |
|
dataSource |
|
String to access the logged signal’s data values. |
|
dataValues |
|
Time series data for this signal. |
|
blockSource |
|
String specifying the path to the block that defines the signal. |
|
modelSource |
|
String specifying the name of the model that defines the signal. |
7-206

Simulink.sdi.Signal
signalLabel
String specifying the name of the signal.
timeDim
For any given data sample, the time dimension.
sampleDims
Dimensions of a data sample.
portIndex
Index of the port that defines the signal.
channel
Channel index. This property applies to matrix data only. Matrix data is flattened into a scalar time series by using channels.
SID
“Simulink Identifier” on page 9-2 of the block that defines the signal.
Comparison Properties (read and write)
Each signal has properties that the Simulation Data Inspector uses for comparing two signals. The Simulation Data Inspector uses the comparison properties from the first signal passed in, also called the reference signal.
absTol
Absolute tolerance of the signal. Must be a positive number.
relTol
Relative tolerance of the signal. Must be a positive number.
syncMethod
7-207

Simulink.sdi.Signal
Copy
Semantics
Examples
Time synchronization method to align time vector when comparing signals. Possible values are: 'intersection',
'uniform', and 'union'.
interpMethod
Interpolation method to align data. Possible values are: 'zoh' and 'linear'.
Visualization Properties (read and write)
lineColor
Signal line color in the plot in the form of a vector [r g b]. r is the red component, g the green component, and b the blue component.
lineDashed
Signal line format in the plot
checked
Boolean specifying if the signal is selected for plotting: true for selected and false for cleared.
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
Create a run and call the Simulink.sdi.getSignal function to get a Simulink.sdi.Signal object.
% Configure model "sldemo_f14" for logging and simulate
simOut = sim('sldemo_f14', 'SaveOutput','on', ...
'SaveFormat', 'StructureWithTime', ...
'ReturnWorkspaceOutputs', 'on');
%Create a Simulation Data Inspector run which returns a list of signal I [~,~,signalIDs] = Simulink.sdi.createRun('My Run', 'base', {'simOut'});
%Get the signal object corresponding to the first signal ID
7-208

Simulink.sdi.Signal
signalObj = Simulink.sdi.getSignal(signalIDs(1));
%signalObj is an instance of Simulink.sdi.Signal. Get the run ID for runID = signalObj.runID;
%Modify or define comparison and visualization properties for this s signalObj.syncMethod = 'intersection';
signalObj.lineColor = [1,0.4,0.6]; signalObj.lineDashed = '-'; signalObj.checked = true;
%View signals in the Simulation Data Inspector tool Simulink.sdi.view;
See Also Simulink.sdi.Run | Simulink.sdi.createRun |
Simulink.sdi.getSignal
How To |
• “Record and Inspect Signal Data Programmatically” |
7-209

Simulink.Signal
Purpose |
Specify attributes of signal |
Description This class enables you to create workspace objects that you can use to assign or validate the attributes of a signal or discrete state, such as its data type, numeric type, dimensions, and so on. You can use a signal object to:
•Assign values to signal attributes that are left unassigned (have a value of -1 or auto) by the signal source.
•Validate signal attributes whose values are explicitly assigned by the signal source. Such attributes have values other than -1 or auto. Successful validation guarantees that the signal has the attributes that you intended it to have.
You can create a Simulink.Signal object in the MATLAB workspace or in a model workspace.
Use signal objects to assign or validate signal or discrete state attributes by giving the signal or discrete state the same name as the workspace variable that references the Simulink.Signal object.
Signal Specification Block: An Alternative to Simulink.Signal
You can use a Signal Specification block rather than a Simulink.Signal object to assign properties left unspecified by a signal source. Each technique has advantages and disadvantages:
•Using a signal object simplifies the model and allows you to change signal property values without editing the model, but does not show signal property values directly in the block diagram.
•Using a Signal Specification block displays signal property values directly in the block diagram, but complicates the model and requires editing it to change signal property values.
•You can use a Signal Specification block with virtual and nonvirtual buses; you can use only nonvirtual buses with a Simulink.Signal object.
The following two models illustrate the respective advantages of the two ways of assigning attributes to a signal.
7-210

Simulink.Signal
In the first example, the signal object named Sig1 specifies the sample time and data type of the signal emitted by input port In1.
To determine the properties of the Sig1 signal, you can view the signal object in the Model Explorer. In this model, the sample time is -1 and the data type is auto.
Using a signal object to specify the sample time and data type properties of signal Sig1 allows you to change the sample time or data type without having to edit the model. For example, you could use the Model Explorer, the MATLAB command line, or a MATLAB program to change these properties.
The second example uses a Signal Specification block specifies the sample time and data type of the signal emitted by input port In2. The Signal Specification block displays the data type and signal sample time properties right in the diagram, which in this case are uint8 and 4, respectively.
7-211

Simulink.Signal
Using Signal Objects to Assign or Validate Signal Attributes
This section describes how you can use signal objects to assign or validate signal attributes. The same techniques work with discrete states also. To use a signal object to assign or validate signal attribute values:
1Create a Simulink.Signal object that has the same name as the signal to which you want to assign attributes or whose attributes you want to validate.
a Open the Model Explorer.
bIn the Model Hierarchy pane, select either the Base workspace or Model workspace node, depending on the context you want for the signal object. If you create the signal object in a model workspace, you must set the Storage class parameter to Auto.
cSelect Add > Simulink Signal.
2Set the properties of the object that correspond to the attributes left unspecified by the signal source, or that correspond to the attributes you want to validate. See “Property Dialog Box” on page 7-215 for details.
3Enable explicit or implicit signal resolution:
•Explicit resolution: In the Signal Properties dialog box for the signal, enable Signal name must resolve to Simulink signal object. This is the preferred technique. See “Explicit and Implicit Symbol Resolution” for more information.
•Implicit resolution: Set the Configuration Parameters > Diagnostics > Data Validity > Signal resolution option for
7-212

Simulink.Signal
the model to Explicit and implicit or Explicit and warn implicit. Explicit resolution is the preferred technique.
4Assign the signal object to a workspace variable.
5Associate the signal object with the source signal.
•Give the signal the same name as the workspace variable that references the signal object.
•You can use a variety of techniques to associate a signal object with a signal. For examples, see “Using Signal Objects to Initialize Signals and Discrete States”, “Using Signal Objects to Tune Initial Values”, and “Apply Custom Storage Classes”.
Validation
The result when a signal does not match a signal object can depend on several factors. Simulink software can validate a signal property when you update the diagram, while you run a simulation, or both. When and how validation occurs can depend on internal rules that are subject to change, and sometimes on configuration parameter settings.
Not all signal validation compares signal source attributes with signal object properties. For example, if you specify Minimum and Maximum signal values using a signal object, the signal source must specify the same values as the signal object (or inherit the values from the object) but such validation relates only to agreement between the source and the object, not to enforcement of the minimum and maximum values during simulation.
If the value of Configuration Parameters > Diagnostics > Data Validity > Simulation range checking is none (the default), Simulink does not enforce any minimum and maximum signal values during simulation, even though a signal object provided or validated them. To enforce minimum and maximum signal values during simulation, set Simulation range checking to warning or error. See “Signal Ranges” and “Diagnostics Pane: Data Validity” for more information.
7-213

Simulink.Signal
Multiple Signal Objects
You can associate a given signal object with more than one signal if the storage class of the signal object is Auto. If the storage class of the object is other than Auto, you can associate the signal object with no more than one signal.
You can associate a given signal with no more than one signal object. The signal can refer to the signal object more that once, but every reference must resolve to exactly the same signal object. Referencing two different signal objects that have exactly the same properties causes a compile-time error.
A compile-time error occurs if a model associates more than one signal object with any signal. To prevent the error, decide which object you want the signal to use, then delete or reconfigure all references to any other signal objects, so that all remaining references resolve to the chosen signal object. See “Display Signal Sources and Destinations” for a description of techniques that you can use to trace the full extent
of a signal.
7-214
Simulink.Signal
Property
Dialog
Box |
Data type |
|
Data type of the signal. The default entry, auto, specifies that |
|
Simulink should determine the data type. Use the adjacent |
|
pulldown list to specify built-in data types (for example, uint8). |
|
To specify a custom data type, enter a MATLAB expression that |
|
specifies the type, (for example, a base workspace variable that |
|
references a Simulink.NumericType object). |
7-215

Simulink.Signal
To specify a bus object as the data type for the signal object, use the Bus: <object_name> option. See “Bus Support” on page 7-220 for details about what you need to do if you specify a bus object as the data type.
Click the Show data type assistant button  to display the Data Type Assistant, which helps you set the Data type parameter. (See “Specify Data Types Using Data Type Assistant” in Simulink User’s Guide.)
to display the Data Type Assistant, which helps you set the Data type parameter. (See “Specify Data Types Using Data Type Assistant” in Simulink User’s Guide.)
Complexity
Numeric type of the signal. Valid values are auto (determined by Simulink), real, or complex.
Dimensions
Dimensions of this signal. Valid values are -1 (the default) specifying any dimensions, N specifying a vector signal of size N, or [M N] specifying an MxN matrix signal.
Dimensions mode
Dimensions mode of this signal. From the drop-down list, select
•Auto — Allows variable-size and fixed-size signals.
•Fixed — Allows only fixed-size signals. Does not allow variable-size signals.
•Variable — Allows only variable-size signals.
Sample time
Rate at which the value of this signal should be computed. See “Specify Sample Time” for details.
Sample mode
Sample mode of this signal. Simulink ignores the setting of this field.
Minimum
Minimum value that the signal should have. The default value is [] (unspecified). Specify a finite, real, double, scalar value.
7-216

Simulink.Signal
Note If you specify a bus object as the data type for a signal, do not set the minimum value for bus data on the signal property dialog box. Simulink ignores this setting. Instead, set the minimum values for bus elements of the bus object specified as the data type. For information on the Minimum property of a bus element, see Simulink.BusElement.
Simulink uses this value in the following ways:
•When updating the diagram or starting a simulation, Simulink generates an error if the signal’s initial value is less than the minimum value or if the minimum value is outside the range for the data type of the signal.
•When you enable the Simulation range checking diagnostic, Simulink alerts you during simulation if the signal value is less than the minimum value (see “Simulation range checking”).
Maximum
Maximum value that the signal should have. The default value is [] (unspecified). Specify a finite, real, double, scalar value.
Note If you specify a bus object as the data type for a signal, do not set the maximum value for bus data on the signal property dialog box. Simulink ignores this setting. Instead, set the maximum values for bus elements of the bus object specified as the data type. For information on the Maximum property of a bus element, see Simulink.BusElement.
Simulink uses this value in the following ways:
•When updating the diagram or starting a simulation, Simulink generates an error if the initial value of the signal is greater than the maximum value or if the maximum value is outside the range of the data type of the signal.
7-217

Simulink.Signal
•When you enable the Simulation range checking diagnostic, Simulink alerts you during simulation if the signal value
is greater than the maximum value (see “Simulation range checking”).
Initial value
Signal or state value before a simulation takes its first time step. You can specify any MATLAB string expression that evaluates to a double numeric scalar value or array.
Valid:
1.5 [1 2 3] 1+0.5
foo = 1.5; s1.InitialValue = 'foo';
Invalid:
uint(1)
foo = '1.5'; s1.InitialValue = 'foo';
If you use a bus object as the data type for the signal object, set Initial value to a string containing either 0 or a MATLAB
structure that matches the bus object. See “Bus Support” on page 7-220 for details.
If the initial value evaluates to a MATLAB structure, then in the
Configuration Parameters > Diagnostics > Data Validity pane, set “Underspecified initialization detection” to simplified.
If necessary, Simulink converts the initial value to ensure type, complexity, and dimension consistency with the corresponding block parameter value. If you specify an invalid value or expression, an error message appears when you update the model.
7-218

Simulink.Signal
Also, Simulink performs range checking of the initial value. The software alerts you when the initial value of the signal lies outside a range that corresponds to its specified minimum and maximum values and data type.
Classic initialization mode: In this mode, initial value settings for signal objects that represent the following signals and states override the corresponding block parameter initial values if undefined (specified as []):
•Output signals of conditionally executed subsystems and Merge blocks
•Block states
Simplified initialization mode: In this mode, initial values of signal objects associated with the following blocks are ignored. The initial values of the corresponding blocks (which cannot be specified as []) are used instead.
•Outport blocks of conditionally executed subsystems
•Merge blocks
Units
Measurement units in which the value of this signal is expressed, (for example, inches). You can use this parameter to document this signal. Simulink ignores it during simulation.
Storage class
Storage class of this signal. For more information, see “Tunable Parameter Storage Classes”.
If you create the signal object in a model workspace, you must set the object storage class to Auto.
Alias
Alternate name for this signal. Simulink ignores this setting. This property is used for code generation.
7-219

Simulink.Signal
Alignment
|
Data alignment boundary, specified in number of bytes. The |
|
starting memory address for the data allocated for the signal will |
|
be a multiple of the Alignment setting. The default value is |
|
-1, which specifies that the code generator should determine an |
|
optimal alignment based on usage. Otherwise, specify a positive |
|
integer that is a power of 2, not exceeding 128. This field is |
|
intended for use by Simulink Coder software. See “Configure Data |
|
Alignment for Function Implementations”. Simulink software |
|
ignores this setting. |
|
Description |
|
Description of this signal. This field is intended for use in |
|
documenting this signal. This property is used by the Simulink |
|
Report Generator and for code generation. |
Bus |
Using Bus Objects as the Data Type |
Support |
Simulink.Signal supports nonvirtual buses as the output data type. |
|
|
|
If you set the Data type of the signal object to be a bus object, then you |
|
cannot associate the signal object with a non-bus signal. |
|
Using Structures for the Initial Value |
|
If you use a bus object as the data type, set Initial value to 0 or a |
|
MATLAB structure that matches the bus object. |
|
The structure you specify must contain a value for every element of the |
|
bus represented by the bus object. |
|
You can use the Simulink.Bus.createMATLABStruct to create a full |
|
structure that corresponds to a bus. |
|
You can use Simulink.Bus.createObject to create a bus object from a |
|
MATLAB structure. |
|
Setting Configuration Parameters to Support Using a Bus |
|
Object Data Type |
|
To enable the use of a bus object as the signal object data type, |
|
before you start a simulation, in the Configuration Parameters > |
7-220

Simulink.Signal
Properties
Diagnostics > Connectivity pane, set “Mux blocks used to create bus signals” to error. The documentation for that diagnostic explains how convert your model to handle error messages the diagnostic generates.
|
Name |
Access |
Description |
|
|
CoderInfo |
RW |
Information used by Simulink Coder |
|
|
|
|
for generating code for this signal. The |
|
|
|
|
value of this property is an object of |
|
|
|
|
Simulink.SignalCoderInfo class. |
|
|
Description |
RW |
Description of this signal. This field is |
|
|
|
|
intended for use in documenting this |
|
|
|
|
signal. (Description) |
|
|
DataType |
RW |
String specifying the data type of this |
|
|
|
|
signal. (Data type) |
|
|
Min |
RW |
Minimum value that this signal can |
|
|
|
|
have. (Minimum) |
|
|
Max |
RW |
Maximum value that this signal can |
|
|
|
|
have. (Maximum) |
|
|
DocUnits |
RW |
Measurement units used for expressing |
|
|
|
|
this signal value. (Units) |
|
|
Dimensions |
RW |
Scalar or vector specifying the |
|
|
|
|
dimensions of this signal. (Dimensions) |
|
|
Complexity |
RW |
String specifying the numeric type of |
|
|
|
|
this signal. Valid values are 'auto', |
|
|
|
|
'real', or 'complex'. (Complexity) |
|
|
SampleTime |
RW |
Rate at which this signal should be |
|
|
|
|
updated. (Sample time) |
|
|
Sampling |
RW |
Sampling mode of this signal. (Sample |
|
|
Mode |
|
mode) |
|
|
InitialValue |
RW |
Signal or state value before a simulation |
|
|
|
|
takes its first time step. (Initial Value) |
|
7-221

Simulink.SignalCoderInfo
Purpose
Description
Property
Dialog
Box
Properties
Specify information needed to generate code for signal
Simulink software creates an instance of this class for each instance of a Simulink.Signal object that it creates. Simulink software uses the Simulink.SignalCoderInfo object to store information needed to generate code for the signal specified by the Simulink.Signal object.
You can set the properties of an instance of this class via the CoderInfo property or the property dialog box of the Simulink.Signal object that uses it. For example, the following MATLAB expression sets the
StorageClass property of a Simulink.SignalCoderInfo object named mysignal.
mysignal.CoderInfo.StorageClass = 'exportedGlobal';
Use the Code Generation Options section of the Simulink.Signal property dialog box to set the StorageClass, Alias, and Alignment properties of objects of this class.
|
Name |
Description |
|
|
Alias |
Alternate name for this signal. |
|
|
Alignment |
Data alignment boundary for this signal. |
|
|
|
See “Configure Data Alignment for Function |
|
|
|
Implementations” in the Embedded Coder |
|
|
|
documentation for more information. |
|
|
CustomAttributes |
Custom storage class attributes of this signal. |
|
|
|
See “Introduction to Custom Storage Classes” |
|
|
|
in the Embedded Coder documentation for |
|
|
|
more information. |
|
|
CustomStorageClass |
Custom storage class of this signal. |
|
|
StorageClass |
Storage class of this signal. For more |
|
|
|
information, see “Signals” in the Simulink |
|
|
|
Coder documentation. |
|
7-222

Simulink.SimulationData.BlockPath
Purpose
Description
Property
Summary
Method
Summary
Fully specified Simulink block path
Simulink creates block path objects when creating dataset objects for signal logging and data store
logging. Simulink.SimulationData.Signal and
Simulink.SimulationData.DataStoreMemory objects include block path objects.
You can create a block path that you can use with the
Simulink.SimulationData.Dataset.getElement method to access a specific dataset element. If you want to create a dataset in MATLAB to use as a baseline to compare against a signal logging or data store logging dataset, then you need to create the block paths as part of that dataset.
The Simulink.SimulationData.BlockPath class is very similar to the Simulink.BlockPath class.
You do not have to have Simulink installed to use the
Simulink.SimulationDataBlockPath class. However, you must have Simulink installed to use the Simulink.BlockPath class. For Simulink environments, consider using Simulink.BlockPath instead
of Simulink.SimulationData.BlockPath. The Simulink.BlockPath class includes a method for checking the validity of block path objects, without you having to update the model diagram.
|
Name |
|
Description |
|
|
SubPath |
|
Individual component within the block |
|
|
|
|
specified by the block path |
|
|
|
|
|
|
|
Name |
Description |
|
|
|
BlockPath |
Create a block path. |
|
|
|
convertToCell |
Convert a block path to a cell array of strings. |
|
|
|
|
|
|
|
7-223
Simulink.SimulationData.BlockPath
|
Name |
Description |
|
|
getBlock |
Get a single block path in the model reference |
|
|
|
hierarchy. |
|
|
getLength |
Get the length of the block path. |
|
|
|
|
|
Properties
SubPath
Description
Represents an individual component within the block specified by the block path.
For example, if the block path refers to a Stateflow chart, you can use SubPath to indicate the chart signals. For example:
Block Path:
'sf_car/shift_logic'
SubPath:
'gear_state.first'
Data Type string
Access
RW
Methods
BlockPath
Purpose
Create block path
Syntax
blockpath_object blockpath_object blockpath_object blockpath_object
=Simulink.SimulationData.BlockPath()
=Simulink.SimulationData.BlockPath(blockpath)
=Simulink.SimulationData.BlockPath(paths)
=Simulink.SimulationData.BlockPath(paths, subpath)
7-224
Simulink.SimulationData.BlockPath
Input Arguments
blockpath
The block path object that you want to copy.
paths
A string or cell array of strings that Simulink uses to build the block path.
Specify each string in order, from the top model to the specific block for which you are creating a block path.
Each string must be a path to a block within the Simulink model. The block must be:
•A block in a single model
•A Model block (except for the last string, which may be a block other than a Model block)
•A block that is in a model that is referenced by a Model block that is specified in the previous string
subpath
A string that represents an individual component within a block.
Output Arguments
blockpath_object
The block path that you create.
Description
blockpath_object = Simulink.SimulationData.BlockPath() creates an empty block path.
blockpath_object =
Simulink.SimulationData.BlockPath(blockpath) creates a copy of the block path of the block path object that you specify with
the source_blockpath argument.
blockpath = Simulink.SimulationData.BlockPath(paths) creates a block path from the string or cell array of strings that you specify
7-225

Simulink.SimulationData.BlockPath
with the paths argument. Each string represents a path at a level of model hierarchy.
blockpath = Simulink.SimulationData.BlockPath(paths, subpath) creates a block path from the string or cell array of strings that you specify with the paths argument and creates a path for the individual component (for example, a signal) of the block.
Example
Create a block path object called bp1, using a cell array of strings representing elements of the block path.
bp1 = Simulink.SimulationData.BlockPath(...
{'sldemo_mdlref_depgraph/thermostat', ...
'sldemo_mdlref_heater/Fahrenheit to Celsius', ...
'sldemo_mdlref_F2C/Gain1'})
The resulting block path reflects the model reference hierarchy for the block path.
bp1 =
Simulink.BlockPath
Package: Simulink
Block Path: 'sldemo_mdlref_depgraph/thermostat'
'sldemo_mdlref_heater/Fahrenheit to Celsius' 'sldemo_mdlref_F2C/Gain1
convertToCell
Purpose
Convert block path to cell array of strings
Syntax
cellarray = Simulink.SimulationData.BlockPath.convertToCell()
7-226

Simulink.SimulationData.BlockPath
Output Arguments
cellarray
The cell array of strings representing the elements of the block path.
Description cellarray =
Simulink.SimulationData.BlockPath.convertToCell() converts a block path to a cell array of strings.
Examples
bp1 = Simulink.SimulationData.BlockPath(...
{'sldemo_mdlref_depgraph/thermostat', ...
'sldemo_mdlref_heater/Fahrenheit to Celsius', ...
'sldemo_mdlref_F2C/Gain1'})
cellarray_for_bp1 = bp1.convertToCell()
The result is a cell array representing the elements of the block path.
cellarray_for_bp1 =
'sldemo_mdlref_depgraph/thermostat' 'sldemo_mdlref_heater/Fahrenheit to Celsius' 'sldemo_mdlref_F2C/Gain1'
getBlock
Purpose
Get single block path in model reference hierarchy
Syntax
block = Simulink.SimulationData.BlockPath.getBlock(index)
Input Arguments
index
The index of the block for which you want to get the block path. The index reflects the level in the model reference hierarchy. An index of 1 represents a block in the top-level model, an index of 2 represents a block in a model referenced by the block of index
7-227

Simulink.SimulationData.BlockPath
1, and an index of n represents a block that the block with index n-1 references.
Output Arguments
block
The block representing the level in the model reference hierarchy specified by the index argument.
Description
blockpath =
Simulink.SimulationData.BlockPath.getBlock(index) returns the block path of the block specified by the index argument.
Example
Get the block for the second level in the model reference hierarchy.
bp1 = Simulink.SimulationData.BlockPath(...
{'sldemo_mdlref_depgraph/thermostat', ...
'sldemo_mdlref_heater/Fahrenheit to Celsius', ...
'sldemo_mdlref_F2C/Gain1'})
blockpath = bp1.getBlock(2)
The result is the thermostat block, which is at the second level in the block path hierarchy.
blockpath =
sldemo_mdlref_heater/Fahrenheit to Celsius
getLength
Purpose
Get length of block path
Syntax
length = Simulink.SimulationData.BlockPath.getLength()
7-228

Simulink.SimulationData.BlockPath
Output Arguments
length
The length of the block path. The length is the number of levels in the model reference hierarchy.
Description
length = Simulink.SimulationData.BlockPath.getLength() returns a numeric value that corresponds to the number of levels in the model reference hierarchy for the block path.
Example
Get the length of block path bp1.
bp1 = Simulink.SimulationData.BlockPath(...
{'sldemo_mdlref_depgraph/thermostat', ...
'sldemo_mdlref_heater/Fahrenheit to Celsius', ...
|
'sldemo_mdlref_F2C/Gain1'}) |
|
length_bp1 = bp1.getLength() |
|
The result reflects that the block path has three elements. |
|
length_bp1 = |
|
3 |
See Also |
Simulink.BlockPath | Simulink.SimulationData.Dataset |
How To |
• “Specify the Instance That Has Normal Mode Visibility” |
7-229

Simulink.SimulationData.Dataset
Purpose |
Container for logged data using MATLAB timeseries objects |
Description Simulink creates Simulink.SimulationData.Dataset objects to store data elements when:
•Performing signal logging, if you use the default signal logging format of Dataset
•Logging a data store
Using the Dataset format for signal logging offers several advantages, compared to the ModelDataLogs format. For a discussion of those advantages, see “Signal logging format”.
Simulink.SimulationData.Dataset provides a getElement method for accessing individual elements in the dataset. You can specify an element by index, name, or block path.
To select the Dataset format for signal logging, use one of these approaches:
•Set the Configuration Parameters > Data Import/Export > Signal logging format parameter to Dataset. For details, see “Signal logging format”.
•From the MATLAB command line, set the SignalLoggingSaveFormat parameter to Dataset.
Unlike the handle-based ModelDataLogs class,
Simulink.SimulationData.Dataset is a value class. For details, see “Handle Versus Value Classes”.
If you have logged signal data in the ModelDataLogs format, you can
use the Simulink.ModelDataLogs.convertToDataset function to update the ModelDataLogs data to Dataset format.
Simulink checks signal logging data format consistency for certain model referencing configurations. For details, see “Model Reference Signal Logging Format Consistency”. You can use the Upgrade Advisor (with the upgradeadvisor function) to upgrade a model to use Dataset format.
7-230

Simulink.SimulationData.Dataset
Property
Summary
Method
Summary
An alternative approach for handling reported inconsistencies is to
use the Simulink.SimulationData.updateDatasetFormatLogging function to update the models to use Dataset format. This approach sets the Model Configuration Parameters > Data Import/Export > Signal logging format parameter to Dataset for each referenced model and each variant.
If you have logged signal data in the ModelDataLogs format, you can
use the Simulink.ModelDataLogs.convertToDataset function to convert the ModelDataLogs data to Dataset format.
For details about migrating an existing model that uses ModelDataLogs format to use Dataset format, see “ Migrate from ModelDataLogs to Dataset Format”.
|
Name |
|
Description |
|
|
Name |
|
Logged dataset name. |
|
|
|
|
|
|
|
Name |
Description |
|
|
|
addElement |
Add an element to the end of a dataset. |
|
|
|
get |
Get element or collection of elements from the |
|
|
|
The getElement |
dataset, based on index, name, or block path. |
|
|
|
|
|
|
|
|
method uses the |
|
|
|
|
same syntax and |
|
|
|
|
behavior as the get |
|
|
|
|
method |
|
|
|
|
getLength |
Get number of elements in the dataset. |
|
|
|
setElement |
Change the element stored at the specified |
|
|
|
|
index |
|
|
7-231
Simulink.SimulationData.Dataset
Properties
Name
Description
The name of the dataset. The default is an empty string.
Specify a name when you want to easily distinguish one dataset from another. For example, if you have signal logging in model reference hierarchy, name the signal logging dataset for each model to make the output easier to analyze.
The following example shows how to give a dataset the name of
Dataset1.
ds = Simulink.SimulationData.Dataset ds.Name = 'Dataset1'
Data Type string
Access
RW
Methods
addElement
Purpose
Add element to end of dataset.
Syntax
dataset = dataset.addElement(element) dataset = dataset.addElement(element,name)
Input Arguments
element
The element to add to the dataset. The element must be one of the following:
•Simulink.SimulationData.Signal object
•Simulink.SimulationData.DataStoreMemory object
7-232

Simulink.SimulationData.Dataset
name
A string specifying a name for the element.
Output Arguments
dataset
The dataset to which you add the element. The new element is added to the end of the dataset.
Description
dataset =
Simulink.SimulationData.Dataset.addElement(element) adds an element to the Simulink.SimulationData.Dataset dataset.
dataset =
Simulink.SimulationData.Dataset.addElement(element, name) adds an element to the Simulink.SimulationData.Dataset dataset. This element receives the name that you specify with the name argument. You can use name to identify an element that does not have a name. If an object that already has a name (for example, a
Simulink.SimulationData.Signal object to which you assigned a name), the element uses that name unless you specify a different name by using with the name argument.
Examples
Create a dataset and add three elements to that dataset.
time = 0.1*(0:100)';
ds = Simulink.SimulationData.Dataset; element1 = Simulink.SimulationData.Signal; element1.Name = 'A';
element1.Values = timeseries(sin(time), time); ds = ds.addElement(element1);
element2 = Simulink.SimulationData.Signal; element2.Name = 'B';
element2.Values = timeseries(2*sin(time), time); ds = ds.addElement(element2);
element3 = Simulink.SimulationData.Signal; element3.Name = 'C';
7-233
Simulink.SimulationData.Dataset
element3.Values = timeseries(3*sin(time), time); ds = ds.addElement(element3)
The output is:
ds =
Simulink.SimulationData.Dataset
Package: Simulink.SimulationData
Characteristics:
Name: 'topOut'
Total Elements: 3
Elements:
1:'A'
2:'B'
3:'C'
get
Purpose
Get element or collection of elements from dataset, based on index, name, or block path
The getElement method shares the same syntax and behavior as the get method.
Syntax
element = dataset.get(search_arg)
element = dataset.get(search_arg,'-blockpath')
Input Arguments
search_arg
The index, name, or block path that identifies the element to access. To access an element by:
• Index — Set search_arg to a scalar numeric value.
7-234
Simulink.SimulationData.Dataset
•Name — Set search_arg to a character array.
•Block path — Specify a Simulink.SimulationData.BlockPath object. For signal logging, specify the blockpath for the source block for the element.
When specifying a name or block path for search_arg in cases where there could be duplicate names or block paths, use a cell array to consistently return a
Simulink.SimulationData.Dataset object. (Such duplication could occur, for example, in a model reference hierarchy.)
'-blockpath'
Specify a block path directly. Set search_arg to a character array representing the full block path to the element, followed by '-blockpath'.
Output Arguments
element
The element that the getElement method adds to the dataset. The returned value depends on the search_arg format.
|
search_arg Argument Value |
Returned Value |
|
|
Single-character array or |
Single element if only one element is found; |
|
|
Simulink.SimulationData.BlockPath |
dataset if more than one element with the |
|
|
object |
specified name exists |
|
|
Cell array containing one string or |
Dataset |
|
|
Simulink.SimulationData.BlockPath |
|
|
|
object |
|
|
Description
element = Simulink.SimulationData.Dataset.get(search_arg) returns the element corresponding the index, name, or block path that you specify with search_arg.
element = Simulink.SimulationData.Dataset.get(search_arg, '-blockpath') returns the element corresponding the search_arg
7-235

Simulink.SimulationData.Dataset
character array that identifies the block path for the element that you want to access.
Examples
Access dataset elements in the top model of the sldemo_mdlref_bus model. The signal logging dataset is topOut.
sldemo_mdlref_bus sim('sldemo_mdlref_bus') topOut
The output is:
topOut =
Simulink.SimulationData.Dataset
Package: Simulink.SimulationData
Characteristics:
Name: 'topOut'
Total Elements: 4
Elements:
1:'COUNTERBUS'
2:'OUTPUTBUS'
3:'INCREMENTBUS'
4:'inner_bus'
-Use get or getElement to access elements by index, name or block path. -Use addElement or setElement to add or modify elements.
Methods, Superclasses
Access the first element of the dataset, by specifying an index for search_arg.
element1 = topOut.get(1)
7-236

Simulink.SimulationData.Dataset
Access the second element of the dataset, by using a cell array to specify the name for search_arg.
element2 = topOut.get({'OUTPUTBUS'})
Access the third element of the dataset by block path. In the Simulink Editor, select the IncrementBusCreator block. At the MATLAB command line, use gcb for search_arg and use the '-blockpath' argument.
element3 = topOut.get(gcb,'-blockpath')
getLength
Purpose
Get number of elements in dataset.
Syntax
length = Simulink.SimulationData.Dataset.getLength()
Description
length = Simulink.SimulationData.Dataset.getLength() Get the number of elements in the top-level dataset. To get the number of elements of a nested dataset, use getLength with the nested dataset.
Example
Get the number of elements in the signal logging dataset for the sldemo_mdlref_demo.
length = topOut.getLength()
setElement
Purpose
Change element stored at specified index.
7-237

Simulink.SimulationData.Dataset
Syntax
dataset = Simulink.SimulationData.Dataset.setElement(index,...
element)
dataset = Simulink.SimulationData.Dataset.setElement(index,...
element,name)
Input Arguments
index
A scalar numeric value specifying the index for the added element. The value must be between 1 and the number of elements plus 1.
element
The element to replace an existing element or to add to the dataset. The element must be one of the following:
•Simulink.SimulationData.Signal object
•Simulink.SimulationData.DataStoreMemory object
name
A string specifying a name for the element.
Output Arguments
dataset
The dataset in which you change or add an element.
Description
dataset = Simulink.SimulationData.Dataset.setElement(index, element) Change the element stored at the specified index, for an existing index. If index is one greater than the number of elements in the dataset, the element is added at the end of the dataset.
dataset = Simulink.SimulationData.Dataset.setElement(index, element, name) changes the element stored at the specified index and gives it the name that you specify with the name argument. You can use name to identify an element that does not have a name. If an object that already has a name (for example, a Simulink.SimulationData.Signal object to which you assigned a name), the element uses that name unless you specify a different name by using with the name argument.
7-238

Simulink.SimulationData.Dataset
Example
ds = Simulink.SimulationData.Dataset element1 = Simulink.SimulationData.Signal element1.Name = 'A'
ds = ds.addElement(element1)
element2 = Simulink.SimulationData.Signal element2.Name = 'B'
elementNew = Simulink.SimulationData.Signal ds = ds.setElement(2,elementNew,'B1')
ds
The output is:
ds =
Simulink.SimulationData.Dataset
Package: Simulink.SimulationData
Characteristics:
Name: 'topOut'
Total Elements: 2
Elements:
1:'A'
2:'B1'
Use getElement to access elements by index, name or block path.
Methods, Superclasses
See Also Simulink.SimulationData.BlockPath
| Simulink.SimulationData.Signal |
Simulink.SimulationData.DataStoreMemory |
Simulink.ModelDataLogs
How To |
• |
“Specify the Signal Logging Data Format” |
|
• |
“Export Signal Data Using Signal Logging” |
7-239

Simulink.SimulationData.Dataset
• “Log Data Stores”
7-240

Simulink.SimulationData.DataStoreMemory
Purpose
Description
Property
Summary
Properties
Container for data store logging information
Simulink uses Simulink.SimulationData.DataStoreMemory objects to store logging information from Data Store Memory blocks during simulation. The objects contain information about the blocks that write to the data store.
|
Name |
Description |
|
|
BlockPath |
Location of Data Store Memory block for |
|
|
|
the logged data store |
|
|
DSMWriterBlockPaths |
Location of Data Store Write blocks that |
|
|
|
write to the data store |
|
|
DSMWriters |
Data Store Write blocks for each signal |
|
|
|
value |
|
|
Name |
Name of the data store dataset |
|
|
Scope |
Scope of the data store: 'local' or |
|
|
|
'global' |
|
|
Values |
Time and data that were logged |
|
|
|
|
|
BlockPath
Description
Location of Data Store Memory block for the logged data store.
Data Type string
Access
RW
7-241
Simulink.SimulationData.DataStoreMemory
DSMWriterBlockPaths
Description
Location of blocks that write to the data store. Each element of the array contains the full block path of one writer block.
Data Type
Vector of Simulink.SimulationData.BlockPath objects
Access
RO
DSMWriters
Description
The number of writes in the data store.
The nth element of DSMWriters contains the index of the element in DSMWriterBLockPaths that contains the block path of the writer that performed the nth write to Values.
Data Type
Integer vector
Access
RO
Name
Description
Name of the data store dataset
Data Type string
Access
RO
7-242

Simulink.SimulationData.DataStoreMemory
Scope
Description
Scope of the data store: 'local' or 'global'
Data Type string
Access
RW
Values
Description
Time and data that were logged
Data Type
MATLAB timeseries
Access
RW
See Also Simulink.SimulationData.Dataset |
Simulink.SimulationData.BlockPath | Data Store Memory |
Data Store Write
How To |
• “Log Data Stores” |
7-243

Simulink.SimulationData.LoggingInfo
Purpose
Description
Property
Summary
Method
Summary
Properties
Signal logging override settings
This object specifies a set of signal logging override settings.
Use a Simulink.SimulationData.LoggingInfo object to specify the signal logging override settings for a signal. You can use this object for the LoggingInfo property of a
Simulink.SimulationData.SignalLoggingInfo object.
|
Name |
Description |
|
|
DataLogging |
Signal logging mode. |
|
|
NameMode |
Source of signal logging name. |
|
|
LoggingName |
Custom signal logging name. |
|
|
DecimateData |
Use interval for logging data points. |
|
|
Decimation |
Decimation value (M): Simulink logs every |
|
|
|
Mth data point. |
|
|
LimitDataPoints |
Limit number of data points to log. |
|
|
MaxPoints |
Maximum number of data points to log |
|
|
|
(N). The set of logged data points is the last |
|
|
|
N data points generated by the simulation. |
|
|
Name |
Description |
|
|
LoggingInfo |
Create a set of signal logging override settings |
|
|
|
for a signal. |
|
|
|
|
|
|
DataLogging |
|
|
|
Description |
|
|
|
Signal logging mode. |
|
|
Indicates whether logging is enabled for this signal.
7-244
Simulink.SimulationData.LoggingInfo
Data Type
logical value — {true} | false
Access
RW
NameMode
Description
Source of signal logging name.
Indicates whether the signal logging name is a custom name ('true') or whether the signal logging name is the same as the signal name
('false').
Data Type
logical value — true | {false}
Access
RW
LoggingName
Description
Custom signal logging name
The custom signal logging name to use for this signal, if the NameMode property is true.
Data Type string
Access
RW
DecimateData
Description
Log a subset of sample points, selecting data points at a specified interval.
7-245

Simulink.SimulationData.LoggingInfo
Data Type
logical value — true | {false}
Access
RW
Decimation
Description
Decimation value (M). If the DecimateData property is true, then Simulink logs every Mth data point.
Data Type nonzero integer
Access
RW
LimitDataPoints
Description
Limit the number of data points to log.
Data Type
logical value — true | {false}
Access
RW
MaxPoints
Description
Maximum number of data points to log (N). If the LimitDataPoints property is true, then the set of logged data points includes the last N data points generated by the simulation.
Data Type nonzero integer
Access
RW
7-246

Simulink.SimulationData.LoggingInfo
Methods
LoggingInfo
Purpose
Create a Simulink.SimulationData.LoggingInfo object.
Syntax
logging_info_object = Simulink.SimulationData.LoggingInfo() logging_info_object = Simulink.SimulationData.LoggingInfo(object)
Input Arguments
object
A signal logging override settings object whose property values the constructor uses for the new
Simulink.SimlationData.LoggingInfo object. The signal logging override object that you specify can be either of the following types of objects:
•Simulink.SimulationData.LoggingInfo object
•Simulink.LoggingInfo object
Output Arguments logging_info_object
A Simulink.SimulationData.LoggingInfo object.
Description
logging_info_object = Simulink.SimulationData.LoggingInfo() creates a Simulink.SimulationData.LoggingInfo object that has default property values.
logging_info_object =
Simulink.SimulationData.LoggingInfo(object) creates a Simulink.SimulationData.LoggingInfo object that copies the property values from the signal logging override object that you specify with the object argument.
Examples
The following example creates a
Simulink.SimulationData.LoggingInfo object with default settings, changes the DecimateData and Decimation properties,
7-247

Simulink.SimulationData.LoggingInfo
and uses the object for the LoggingInfo property of a
Simulink.SimulationData.SignalLoggingInfo object mi.
log_info = Simulink.SimulationData.LoggingInfo(); log_info.DecimateData = true;
log_info.Decimation = 2;
mi = Simulink.SimulationData.SignalLoggingInfo('sldemo_mdlref_bus'); mi.LoggingInfo = log_info
Simulink.SimulationData.SignalLoggingInfo
Package: Simulink.SimulationData
BlockPath:
'sldemo_mdlref_bus'
OutputPortIndex: 1
LoggingInfo:
DataLogging: 1
NameMode: 0
LoggingName: ''
DecimateData: 1
Decimation: 2
LimitDataPoints: 0
MaxPoints: 5000
See Also Simulink.SimulationData.ModelLoggingInfo |
Simulink.SimulationData.SignalLoggingInfo
| Simulink.SimulationData.BlockPath
| Simulink.SimulationData.Signal |
Simulink.SimulationData.DataStoreMemory |
Simulink.ModelDataLogs
How To |
• |
“Command-Line Interface for Overriding Signal Logging Settings” |
|
• |
“Specify the Signal Logging Data Format” |
|
• |
“Export Signal Data Using Signal Logging” |
7-248

Simulink.SimulationData.LoggingInfo
• “Log Data Stores”
7-249

Simulink.SimulationData.ModelLoggingInfo
Purpose
Description
Signal logging override settings for a model
This class is a collection of
Simulink.SimulationData.SignalLoggingInfo objects that specify all signal logging override settings for a model.
Use methods and properties of this class to:
•Turn off logging for a signal or a Model block.
•Change logging settings for any signals that are already marked for logging within a model.
You can control whether a top-level model and referenced models use override signal logging settings or use the signal logging settings specified by the model. Use the LoggingMode and LogAsSpecifiedByModels properties to control which logging settings to apply.
|
Logging Mode for |
Property Settings |
|
|
Models |
|
|
|
For top-level model and |
Set LoggingMode to |
|
|
all referenced models, use |
LogAllAsSpecifiedInModel. |
|
|
logging settings specified |
|
|
|
in the model. |
|
|
|
For top-level model and |
Set LoggingMode to OverrideSignals. |
|
|
all referenced models, use |
|
|
|
override signal logging |
|
|
|
settings. |
|
|
|
For top-level model and |
Set LoggingMode to OverrideSignals. |
|
|
referenced models, use |
In the LogAsSpecifiedByModels cell |
|
|
a mix of override signal |
|
|
|
array, include the models that you do not |
|
|
|
logging settings and the |
|
|
|
want to use the override signal logging |
|
|
|
signal logging settings |
|
|
|
settings. |
|
|
|
specified in the model. |
|
|
|
|
|
|
|
|
|
|
7-250

Simulink.SimulationData.ModelLoggingInfo
Property
Summary
Method
Summary
Properties
|
Name |
Description |
|
|
LoggingMode |
Signal logging override status |
|
|
LogAsSpecifiedByModels |
Source of signal logging settings for the |
|
|
|
top-level model or a top-level Model block |
|
|
Signals |
All signals that have signal override |
|
|
|
settings |
|
|
Name |
Description |
|
|
findSignal |
Find signals within the Signals |
|
|
|
vector, using block path and output |
|
|
|
port index. |
|
|
verifySignalAndModelPaths |
Verify signal and model paths for the |
|
|
|
model signal logging override object. |
|
|
getLogAsSpecifiedInModel |
Determine whether the model logs |
|
|
|
signals as specified in the model or |
|
|
|
uses override settings. |
|
|
setLogAsSpecifiedInModel |
Set the logging mode for the top-level |
|
|
|
model or a top-level Model block. |
|
|
createFromModel |
Create and populate a model signal |
|
|
|
logging override object with all |
|
|
|
logged signals in the model reference |
|
|
|
hierarchy. |
|
|
ModelLoggingInfo |
Set signals to log or override logging |
|
|
|
settings. |
|
LoggingMode
Description
Signal logging override status. Values are:
7-251

Simulink.SimulationData.ModelLoggingInfo
•OverrideSignals — (Default) Uses the logging settings for signals, as specified in the Signals property. For models where getLogAsSpecifiedInModel is:
-
-
true — Logs all signals, as specified in the model.
false — Logs only the signals specified in the Signals property.
•LogAllAsSpecifiedInModel — Logs signals in the top-level model and all referenced models, as specified in the model. Simulink honors the signal logging indicators (blue antennae) and ignores the Signals property.
To change the logging mode for the top-level model or for a given reference model, use the setLogAsSpecifiedInModel method.
Data Type
logical value — true or false
Access
RW
LogAsSpecifiedByModels
Description
When LoggingMode is set to 'OverrideSignals', this cell array specifies whether the top-level model or a top-level Model block logs all signals based on the signal logging settings defined in the model.
•For the top-level model and top-level Model blocks that the cell array includes, Simulink ignores the Signals property overrides.
•For a model or Model block that the cell array does not include, Simulink uses the Signals property to determine which signals to log.
When LoggingMode is set to 'LogAllAsSpecifiedInModel', Simulink ignores the LogAsSpecifiedByModels property.
Use the getLogAsSpecifiedInModel method to determine whether the top-level model or top-level Model block logs signals as specified in the
7-252

Simulink.SimulationData.ModelLoggingInfo
model (default logging), and use setLogAsSpecifiedInModel to turn default logging on and off.
Data Type
cell array — For the top-level model, specify the model name. For Model blocks, specify the block path.
Access
RW
Signals
Description
Vector of Simulink.SimulationData.SignalLoggingInfo objects for all signals with signal logging override settings.
Data Type
vector of Simulink.SimulationData.SignalLoggingInfo objects
Access
RW
Methods
createFromModel
Purpose
Create a Simulink.SimulationData.ModelLoggingInfo object for a top-level model, with override settings for each logged signal in the model.
Syntax
model_logging_info_object = ...
Simulink.SimulationData.ModelLoggingInfo.createFromModel(...
model, options)
Input Arguments
model
Name of the top-level model for which to create a
Simulink.SimulationData.ModelLoggingInfo object.
7-253

Simulink.SimulationData.ModelLoggingInfo
options
You can use any combination of the following option name and value pairs to control the kinds of systems from which to include logged signals.
•FollowLinks
—on — (Default) Include logged signals from inside of libraries.
—off — Skip all libraries.
•LookUnderMasks
—all — (Default) Include logged signals from all masked subsystems.
—none — Skip all masked subsystems.
—graphical — Include logged signals from masked subsystems that do not have a workspace or dialog box.
—functional — Include logged signals from masked subsystems that do not have a dialog box.
•Variants
—ActiveVariants — (Default) Include logged signals from only active subsystem and model reference variants.
—AllVariants — Include logged signals from all subsystem and model reference variants.
•RefModels
—on — (Default) Include logged signals from referenced models.
—off — Skip all referenced models.
If you select more than one option, then the created
Simulink.SimlationData.ModelLoggingInfo object includes signals that fit the combinations (the “AND”) of the specified options. For example, if you set FollowLinks to on and set
7-254
Simulink.SimulationData.ModelLoggingInfo
RefModels to off, then the model signal logging override object does not include signals from library links that exist inside of referenced models.
Output Arguments model_logging_override_object
Simulink.SimulationData.ModelLoggingInfo object for the top-level model.
Description
model_logging_info_object =
Simulink.SimulationData.ModelLoggingInfo.createFromModel(model) creates a Simulink.SimulationData.ModelLoggingInfo object for the model that includes logged signals for the following kinds of systems:
•Libraries
•Masked subsystems
•Referenced models
•Active variants
model_logging_override_object = Simulink.SimulationData.ModelLoggingInfo.createFromModel(model,
options) creates a Simulink.SimulationData.ModelLoggingInfo object for the model. The included logged signals reflect the options settings for the following kinds of systems:
•Libraries
•Masked subsystems
•Referenced models
•Variants
Examples
The following example creates a model logging override object for the sldemo_mdlref_bus model and automatically adds each logged signal in the model to that object:
7-255

Simulink.SimulationData.ModelLoggingInfo
mi = Simulink.SimulationData.ModelLoggingInfo.createFromModel(...
'sldemo_mdlref_bus')
mi =
Simulink.SimulationData.ModelLoggingInfo
Package: Simulink.SimulationData
Properties:
Model: 'sldemo_mdlref_bus'
LoggingMode: 'OverrideSignals'
LogAsSpecifiedByModels: {}
Signals: [1x4 Simulink.SimulationData.SignalLoggingInfo]
Methods
The following example explicitly specifies the kinds of systems from which to include signals, rather than use the default settings for each kind of system. This example specifies to include signals from all model reference variants (instead of using the default of including only active variant).
The sldemo_mdlref_variants model has two variants:
sldemo_mrv_nonlinear_controller and sldemo_controller. In this example, in each variant, you configure a signal for signal logging, and
then create a Simulink.SimulationData.ModelLoggingInfo object. The resulting object includes, in the Signals property, two signals (one from each variant).
sldemo_mrv_nonlinear_controller; sldemo_mrv_second_order_controller;
ph = get_param('sldemo_mrv_nonlinear_controller/Add','PortHandles'); set_param(ph.Outport(1),'DataLogging','on');
ph1 = get_param('sldemo_mrv_second_order_controller/Add','PortHandles'); set_param(ph1.Outport(1),'DataLogging','on');
mi = Simulink.SimulationData.ModelLoggingInfo.createFromModel(...
'sldemo_mdlref_variants', 'Variants', 'AllVariants')
7-256

Simulink.SimulationData.ModelLoggingInfo
Results:
V_NONLINEAR_CONTROLLER =
Simulink.Variant
Condition: 'CTRL==1'
V_SECOND_ORDER_CONTROLLER =
Simulink.Variant
Condition: 'CTRL==2'
CTRL =
1
mi =
Simulink.SimulationData.ModelLoggingInfo
Package: Simulink.SimulationData
Properties:
Model: 'sldemo_mdlref_variants'
LoggingMode: 'OverrideSignals'
LogAsSpecifiedByModels: {}
Signals: [1x2 Simulink.SimulationData.SignalLoggingInfo]
Methods
ModelLoggingInfo
Purpose
Specify signals to log or override logging settings.
Syntax
model_logging_override_object = ....
7-257

Simulink.SimulationData.ModelLoggingInfo
Simulink.SimulationData.ModelLoggingInfo(model)
Input Arguments
model
Name of the top-level model for which to create a
Simulink.SimulationData.ModelLoggingInfo object
Output Arguments model_logging_override_object
Simulink.SimulationData.ModelLoggingInfo object created for the specified top-level model.
Description
model_logging_override_object=
Simulink.SimulationData.ModelLoggingInfo(model) creates a Simulink.SimulationData.ModelLoggingInfo object for the specified top-level model.
If you use the Simulink.SimulationData.ModelLoggingInfo
constructor, specify a Simulink.SimulationData.SignalLoggingInfo object for each logged signal for which you want to override logging settings.
To check that you have specified valid signal logging override settings for a model, use the verifySignalAndModelPaths method with the
Simulink.SimulationData.ModelLoggingInfo object for the model.
Examples
The following example shows how to log all signals as specified in the top-level model and all referenced models.
mi = Simulink.SimulationData.ModelLoggingInfo('sldemo_mdlref_bus'); mi.LoggingMode = 'LogAllAsSpecifiedInModel'
mi =
Simulink.SimulationData.ModelLoggingInfo
Package: Simulink.SimulationData
7-258

Simulink.SimulationData.ModelLoggingInfo
Properties:
Model: 'sldemo_mdlref_bus'
LoggingMode: 'LogAllAsSpecifiedInModel'
LogAsSpecifiedByModels: {}
Signals: []
Methods
set_param('sldemo_mdlref_bus', 'DataLoggingOverride', mi);
The following example shows how to log only signals in the top-level model:
mi = ...
Simulink.SimulationData.ModelLoggingInfo('sldemo_mdlref_bus');
mi.LoggingMode = 'OverrideSignals';
mi = mi.setLogAsSpecifiedInModel('sldemo_mdlref_bus', true);
set_param('sldemo_mdlref_bus', 'DataLoggingOverride', mi);
findSignal
Purpose
Find signals within the Signals vector, using a block path and optionally an output port index.
Syntax
signal_indices = ...
model_logging_override_object.findSignal(block_path)
signal_indices = ...
model_logging_override_object.findSignal(...
block_path, port_index)
Input Arguments
block_path
Source block to search. The block_path must be one of the following:
• String
7-259

Simulink.SimulationData.ModelLoggingInfo
•Cell array of strings
•Simulink.BlockPath object
port_index
Index of the output port to search. Specify a scalar greater than, or equal to, 1.
Output Arguments
signal_indices
Vector of numeric indices into the signals vector of the
Simulink.SimulationData.ModelLoggingInfo object.
Description
signal_indices =
model_logging_override_object.findSignal(block_path) finds the indices of the signals for the block path that you specify.
To find a single instance of a signal within a referenced model, use a Simulink.BlockPath object or a cell array with a full path.
To find all instances of a signal within a referenced model, use a string with the relative path of the signal within the referenced model.
To find a logged chart signal within a Stateflow chart, use a Simulink.BlockPath object and set the SubPath property to the name of the Stateflow chart signal.
signal_indices =
model_logging_override_object.findSignal(block_path, port_index) finds the indices of the output signal for the port that you specify, for the block path that you specify.
Do not use the port_index argument for Stateflow chart signals.
Examples
To find a signal that is not in a Stateflow chart and that does not appear in multiple instances of a referenced model:
sldemo_mdlref_bus
% Open the referenced model
7-260

Simulink.SimulationData.ModelLoggingInfo
sldemo_mdlref_counter_bus
mi = Simulink.SimulationData.ModelLoggingInfo.createFromModel(...
'sldemo_mdlref_bus');
%Click the Bus Creator block that is the source of
%the logged COUNTERBUS signal
signal_index = mi.findSignal(gcb)
The output is:
signal_index =
4
As an alternative in the above example, you could issue the gcb function and use its output string with the findSignal method:
gcb
ans =
sldemo_mdlref_counter_bus/Bus Creator
signal_index = mi.findSignal('sldemo_mdlref_counter_bus/Bus Creator')
To find a signal in a specific instance of a referenced model that is not in a Stateflow chart, use the following approach:
signal_index = mi.findSignal({'sldemo_mdlref_bus/CounterA', ...
'sldemo_mdlref_counter_bus/Bus Creator'})
For an example that uses the findSignal method with a Stateflow chart, see “Overriding Logging Properties with the Command-Line API” in the Stateflow documentation.
7-261

Simulink.SimulationData.ModelLoggingInfo
getLogAsSpecifiedInModel
Purpose
Determine whether the model logs as specified in the model or uses override settings.
Syntax
logging_mode = ...
getLogAsSpecifiedInModel(model_logging_override_object, path)
Input Arguments model_logging_override_object
A Simulink.SimulationData.ModelLoggingInfo object.
path
The path is a string that specifies one of the following:
•Name of the top-level model
•Block path of a Model block in the top-level model
Output Arguments logging_mode
The logging_mode is:
•true, if the model specified by path is logged as specified in the model.
•false, if the model specified by path is logged using the override settings specified in the Signals property.
Description
logging_mode =
model_logging_override_object.getLogAsSpecifiedInModel(path) returns:
•true, if the model specified by path is logged as specified in the model.
•false, if the model specified by path is logged using the override settings specified in the Signals property.
7-262

Simulink.SimulationData.ModelLoggingInfo
Examples
In the following example, the
Simulink.SimulationData.ModelLoggingInfo object mi uses the override settings specified in its Signals property.
mi = Simulink.SimulationData.ModelLoggingInfo('sldemo_mdlref_bus');
logging_mode = getLogAsSpecifiedInModel(mi, 'sldemo_mdlref_bus')
The output is:
logging_mode =
0
setLogAsSpecifiedInModel
Purpose
Set logging mode for top-level model or top-level Model block
Syntax
setLogAsSpecifiedInModel(override_object, path)
Input Arguments override_object
Simulink.SimulationData.ModelLoggingInfo object.
path
String that specifies one of the following:
•Name of the top-level model
•Block path of a Model block in the top-level model
value
Logging mode:
•true, if the model specified by path is logged as specified in the model
•false, if the model specified by path is logged using the override settings specified in the Signals property.
7-263

Simulink.SimulationData.ModelLoggingInfo
Description
setLogAsSpecifiedInModel(override_object, path, value) sets the LoggingMode property for a top-level model or a Model block in the top-level model.
Example
The following example shows how to log only signals in the top-level model, using the logging settings specified in that model:
mi = Simulink.SimulationData.ModelLoggingInfo('sldemo_mdlref_bus');
mi.LoggingMode = 'OverrideSignals';
setLogAsSpecifiedInModel(mi, 'sldemo_mdlref_bus', true);
set_param('sldemo_mdlref_bus', 'DataLoggingOverride', mi);
verifySignalAndModelPaths
Purpose
Verify paths in Simulink.SimulationData.ModelLoggingInfo object.
Syntax
verified_object = verifySignalAndModelPaths...
(model_logging_override_object, action)
Input Arguments model_logging_override_object
The Simulink.SimulationData.ModelLoggingInfo object to verify. This argument is required.
action
The action that the function performs if verification fails. This argument is optional. Specify one of the following values:
•error — (default) Throw an error when verification fails
•warnAndRemove — Issue a warning when verification fails and update the Simulink.SimulationData.ModelLoggingInfo object.
•remove — Silently update the
Simulink.SimulationData.ModelLoggingInfo object.
7-264
Simulink.SimulationData.ModelLoggingInfo
Output Arguments
verified_object
If the method detects no invalid paths, it returns the validated object. For example:
verified_object =
Simulink.SimulationData.ModelLoggingInfo
Package: Simulink.SimulationData
Properties:
Model: 'logging_top'
LoggingMode: 'OverrideSignals'
LogAsSpecifiedByModels: {}
Signals: [1x11 Simulink.SimulationData.SignalLoggingInfo]
If the method detects an invalid path, it performs the action specified by the action argument. By default, it issues an error message.
Description
verified_object = verifySignalAndModelPaths(model_logging_override_object, action)
For a Simulink.SimulationData.ModelLoggingInfo object, verify that:
•All strings in the LogAsSpecifiedByModels property are either the name of the top-level model or the block path of a Model block in the top-level model.
•The block paths for signals in the Signals property refer to valid blocks within the hierarchy of the top-level model.
•The OutputPortIndex property for all signals in the Signals property are valid for the given block.
•All signals in the Signals property refer to logged signals.
7-265

Simulink.SimulationData.ModelLoggingInfo
The action argument specifies what action the method performs. By default, the method returns an error if it detects an invalid path.
If you use the Simulink.SimulationData.ModelLoggingInfo constructor and specify a
Simulink.SimulationData.SignalLoggingInfo object for each signal, then consider using the verifySignalAndModelPaths method to verify that your object definitions are valid.
Example
The following example shows how to validate the signal and block paths
in a Simulink.SimulationData.ModelLoggingInfo object. Because the action argument is warnAndRemove, if the validation fails, the verifySignalAndModelPaths method issues a warning and updates
the Simulink.SimulationData.ModelLoggingInfo object.
mi = Simulink.SimulationData.ModelLoggingInfo('sldemo_mdlref_bus');
verified_object = verifySignalAndModelPaths...
(mi, 'warnAndRemove')
See Also Simulink.BlockPath | Simulink.SimulationData.LoggingInfo
| Simulink.SimulationData.SignalLoggingInfo
| Simulink.SimulationData.Signal |
Simulink.SimulationData.DataStoreMemory |
Simulink.ModelDataLogs
How To |
• |
“Specify the Signal Logging Data Format” |
|
• |
“Export Signal Data Using Signal Logging” |
|
• |
“Log Data Stores” |
7-266

Simulink.SimulationData.SignalLoggingInfo
Purpose
Description
Property
Summary
Method
Summary
Properties
Signal logging override settings for signal
This object contains the signal override signal logging settings for a single logged signal.
|
Name |
Description |
|
|
BlockPath |
Simulink.BlockPath of source block of |
|
|
|
a signal to log. |
|
|
OutputPortIndex |
Index of an ouput port to log. |
|
|
LoggingInfo |
Simulink.SimulationData.LoggingInfo |
|
|
|
object containing all logging override |
|
|
|
settings for a signal. |
|
|
Name |
Description |
|
|
SignalLoggingInfo |
Create a signal logging override object for a |
|
|
|
signal. |
|
|
|
|
|
BlockPath
Description
Simulink.BlockPath of source block of signal to log. The block path represents the full model reference hierarchy.
To specify a specific instance of a signal, use an absolute path, reflecting the model reference hierarchy, starting at the top model. For example:
sig_log_info = Simulink.SimulationData.SignalLoggingInfo(...
{'sldemo_mdlref_bus/CounterA', ...
'sldemo_mdlref_counter_bus/Bus Creator'})
Data Type
Simulink.BlockPath
7-267

Simulink.SimulationData.SignalLoggingInfo
Access
RW
OuputPortIndex
Description
Index of the output port to log. The index is a 1-based numeric value.
Data Type nonzero integer
Access
RW
LoggingInfo
Description
Simulink.SimulationData.LoggingInfo object containing logging override settings for a signal. The logging settings specify whether signal logging is overridden for this signal. The logging settings also can specify a logging name, a decimation factor, and a maximum number of data points.
Data Type cell array
Access
RW
Methods
SignalLoggingInfo
Purpose
Construct a Simulink.SimulationData.SignalLoggingInfo object.
Syntax
signal_logging_info_object = ...
Simulink.SimulationData.SignalLoggingInfo()
signal_loggingInfo_object = ...
Simulink.SimulationData.SignalLoggingInfo(path)
7-268

Simulink.SimulationData.SignalLoggingInfo
signalLoggingInfo_object = ...
Simulink.SimulationData.SignalLoggingInfo(path,index)
Input Arguments
path
The block path of the source block for which the signal logging override settings apply. If you use this argument without also using the port argument, then Simulink sets the output port index to 1.
index
Output port index to which the signal logging override settings apply.
Output Arguments signal_logging_object
Simulink.SimulationData.SignalLoggingInfo object that represents the override settings of a signal.
Description
signal_logging_override_object =
Simulink.SimulationData.SignalLoggingInfo() creates a Simulink.SimulationData.LoggingInfo object that contains default logging settings for a signal.
signal_logging_override_object =
Simulink.SimulationData.SignalLoggingInfo(path) creates a Simulink.SimulationData.LoggingInfo object, using the specified block path, and sets the output port index to 1.
signal_logging_override_object =
Simulink.SimulationData.SignalLoggingInfo(path, port) creates a Simulink.SimulationData.LoggingInfo object that contains default logging settings for the specified block path and output port index.
Examples
The following example creates a
Simulink.SimulationData.SignalLoggingInfo object for the first output port of the Bus Creator block in the sldemo_mdlref_bus model.
7-269

Simulink.SimulationData.SignalLoggingInfo
sldemo_mdlref_bus;
mi = Simulink.SimulationData.ModelLoggingInfo(...
'sldemo_mdlref_bus');
mi.LoggingMode = 'OverrideSignals';
mi.Signals = ...
Simulink.SimulationDatal.SignalLoggingInfo(...
{'sldemo_mdlref_bus/CounterA', ...
'sldemo_mdlref_counter_bus/Bus Creator'}, 1)
The output is:
mi =
Simulink.SimulationData.ModelLoggingInfo
Package: Simulink.SimulationData
Properties:
Model: 'sldemo_mdlref_bus'
LoggingMode: 'OverrideSignals'
LogAsSpecifiedByModels: {}
Signals: [1x1 Simulink.SimulationData.SignalLoggingInfo]
Methods
See Also Simulink.SimulationData.ModelLoggingInfo
| Simulink.SimulationData.LoggingInfo
| Simulink.SimulationData.BlockPath
| Simulink.SimulationData.Signal |
Simulink.SimulationData.DataStoreMemory |
Simulink.ModelDataLogs
How To |
• |
“Command-Line Interface for Overriding Signal Logging Settings” |
|
• |
“Specify the Signal Logging Data Format” |
|
• |
“Export Signal Data Using Signal Logging” |
|
• |
“Log Data Stores” |
7-270

Simulink.SimulationData.Signal
Purpose
Description
Property
Summary
Properties
Container for signal logging information
Simulink uses Simulink.SimulationData.Signal objects to store signal logging information during simulation. The objects contain information about the source block for the signal, including the port type and index.
|
Name |
Description |
|
|
BlockPath |
Block path for the source block for the |
|
|
|
signal |
|
|
Name |
Name of signal element to use for |
|
|
|
name-based access |
|
|
PortIndex |
Numeric index of port that was logged |
|
|
PortType |
Type of port that was logged: for signal |
|
|
|
logging, the port type is 'outport' |
|
|
Values |
Time and data that were logged |
|
|
|
|
|
BlockPath
Description
Block path for the source block for the signal
Data Type
Simulink.SimulationData.BlockPath
Access
RW
Name
Description
Name of signal element to use for name-based access
7-271

Simulink.SimulationData.Signal
Data Type string
Access
RW
PortIndex
Description
Numeric index of port that was logged
Data Type string
Access
RW
PortType
Description
Type of port that was logged: for signal logging, the port type is
'outport'
Data Type string
Access
RW
Values
Description
Time and data that were logged.
For an example of how to use the Values property and plot logged signal data, in the sldemo_mdlref_bus example, see “Logging Signal Data.”
Data Type
A single MATLAB timeseries object or a MATLAB structure of timeseries objects (for bus signals)
7-272

Simulink.SimulationData.Signal
|
Access |
|
RW |
See Also |
Simulink.BlockPath | Simulink.SimulationData.Dataset | |
|
timeseries |
How To |
• “Access Signal Logging Data” |
|
• “Import MATLAB timeseries Data” |
|
• “Import Structures of timeseries Objects for Buses” |
7-273

Simulink.SimulationOutput
Purpose
Description
Methods
Copy
Semantics
Examples
Access object values of simulation results
The SimulationOutput class contains all simulation outputs, including workspace variables.
Use Simulink.SimulationOutput.who and
either Simulink.SimulationOutput.get or Simulink.SimulationOutput.find methods to access the output variable names and their respective values.
find |
Access and display values of |
|
simulation results |
get |
Access and display values of |
|
simulation results |
who |
Access and display output |
|
variable names of simulation |
Value. To learn how value classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
Simulate the vdp model and place the results of the
Simulink.SimulationOutput object in simOut.
simOut = sim('vdp','SimulationMode','rapid','AbsTol','1e-5',...
'SaveState','on','StateSaveName','xoutNew',...
'SaveOutput','on','OutputSaveName','youtNew');
Store the variable names of the outputs in simOutVars, using the who method.
simOutVars = simOut.who
Simulink returns and displays:
simOutVars =
7-274
Simulink.SimulationOutput
|
|
'xoutNew' |
|
|
'youtNew' |
|
Get the values of the variable youtNew. |
|
|
yout = simOut.get('youtNew') |
|
|
Simulink returns and displays the values. |
|
See Also |
Simulink.SimulationData.BlockPath | |
|
|
Simulink.SimulationData.Dataset |
|
How To |
• |
“Specify the Signal Logging Data Format” |
|
• |
“Export Simulation Data” |
7-275

Simulink.SoftwareTarget.AperiodicTrigger
|
Superclasses |
Trigger |
|
|
|
Purpose |
Describe aperiodic trigger |
||
|
Description |
The Simulink.SoftwareTarget.AperiodicTrigger class describes an |
||
|
|
aperiodic trigger object. This object inherits its properties and methods |
||
|
|
from the Simulink.SoftwareTarget.Trigger class. |
||
|
Properties |
TargetObject |
|
|
|
|
Target specific custom properties for the selected |
||
|
|
EventHandlerType (see the table in EventHandlerType). |
||
|
|
Data Type: Object |
||
|
|
Access: Read only |
||
|
|
EventHandlerType |
|
|
|
|
Describes the aperiodic trigger source for the trigger. Valid |
||
|
|
values depend on the value of the system target file for the active |
||
|
|
configuration set: |
||
|
|
|
|
|
|
System Target |
EventHandlerType |
TargetObject Class |
|
|
File |
|
|
|
|
ert.tlc, |
Event (Windows) |
Simulink.SoftwareTarget.WindowsEventHandler |
|
|
grt.tlc, |
|
|
|
|
idelink_ert.tlc, |
|
|
|
|
idelink_grt.tlc |
|
|
|
|
Ert.tlc, |
POSIX® signal |
Simulink.SoftwareTarget.PosixSignalHandler |
|
|
grt.tlc, |
(Linux®/VxWorks® |
|
|
|
idelink_ert.tlc, |
6.x) |
|
|
|
idelink_grt.tlc |
|
|
|
|
xpctarget.tlc, |
xPC interrupt |
xpcHardwareInterrupt |
|
|
xpctargetert.tlc |
|
|
|
|
|
|
|
|
7-276

Simulink.SoftwareTarget.AperiodicTrigger
Copy
Semantics
Examples
Alternatives
See Also
How To
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
Add an aperiodic trigger to the sldemo_concurrent_execution model.
%Load example model sldemo_concurrent_execution
%Access its configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); % Access task configuration data
taskConfig = configSet.concurrentExecutionComponents; % Add an aperiodic trigger
myTrigger = taskConfig.addAperiodicTrigger('MyTrigger') % Set the name of the newly added aperiodic trigger myTrigger.Name = 'MyTrigger';
“Customize Concurrent Execution Settings”
Simulink.SoftwareTarget.Trigger |
Simulink.SoftwareTarget.PeriodicTrigger
• “Customize Concurrent Execution Settings”
7-277

Simulink.SoftwareTarget.PeriodicTrigger
Superclasses
Purpose
Description
Copy
Semantics
Examples
Alternatives
See Also
How To
Trigger
Describe periodic trigger
The Simulink.SoftwareTarget.PeriodicTrigger class describes a periodic trigger object. This object inherits its properties and methods
from the Simulink.SoftwareTarget.Trigger class.
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
Add an aperiodic trigger for the sldemo_concurrent_execution model.
%Load example model sldemo_concurrent_execution
%Access its configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); % Access task configuration data
taskConfig = configSet.concurrentExecutionComponents; % Access and change the name of the periodic trigger taskConfig.Triggers(1).Name = 'MyTrigger';
“Customize Concurrent Execution Settings”
Simulink.SoftwareTarget.Trigger |
Simulink.SoftwareTarget.AperiodicTrigger
• “Customize Concurrent Execution Settings”
7-278

Simulink.SoftwareTarget.PosixSignalHandler
Superclasses
Purpose
Description
Construction
Properties
Copy
Semantics
Examples
Describe aperiodic trigger for POSIX targets
The Simulink.SoftwareTarget.PosixSignalHandler class describes an aperiodic trigger for one or more POSIX signals.
Create a Simulink.SoftwareTarget.PosixSignalHandler object by setting the EventHandlerType type of an aperiodic trigger object to
Posix Signal (Linux/VxWorks 6.x). This object is created as a side effect and stored in the TargetObject property of the aperiodic trigger object.
SignalNumber
Signal number in the range from 2 to SIGRTMAX-SIGRTMIN-1, where SIGRTMAX is the maximum value and SIGRTMIN is the minimum value of the signals supported by the target Linux or VxWorks operating system.
Data Type: Integer Access: Read write
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
Create a Simulink.SoftwareTarget.PosixSignalHandler object.
% Open demo model sldemo_concurrent_execution % Access configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); % Access concurrent execution
taskConfig = configSet.concurrentExecutionComponents; % Add an aperiodic trigger
trigger = taskConfig.addAperiodicTrigger('MyTrigger'); % Specify custom target
7-279

Simulink.SoftwareTarget.PosixSignalHandler
Alternatives
See Also
How To
trigger.EventHandlerType = 'Posix Signal (Linux/VxWorks 6.x)'; % Access the custom target data
trigger.TargetObject
“Customize Concurrent Execution Settings”
Simulink.SoftwareTarget.TaskConfiguration |
Simulink.SoftwareTarget.WindowsEventHandler |
Simulink.SoftwareTarget.Trigger.addTask
• “Customize Concurrent Execution Settings”
7-280

Simulink.SoftwareTarget.TaskConfiguration
Purpose |
Configure model for concurrent execution |
Description |
The Simulink.SoftwareTarget.TaskConfiguration object contains |
|
the task configuration information for the concurrent execution of a |
|
model. |
Construction |
Create Simulink.SoftwareTarget.TaskConfiguration object by |
|
configuring a model for concurrent execution. |
Properties |
Name |
Name of Simulink.SoftwareTarget.TaskConfiguration object.
Data Type: String
Access: Read/write
Triggers
Vector of periodic and aperiodic triggers, each of which describes trigger conditions for a set of tasks.
Data Type: Vector Access: Read only
TargetCustomizationObject
Set of valid triggers for a deployment target.
Data Type: Object. For example,
Simulink.SoftwareTarget.GRTCustomization.
Access: Read only
BlockToTaskMapping
Specification of block to task mapping.
Data Type: Object
Access: Read only
7-281

Simulink.SoftwareTarget.TaskConfiguration
Methods
Copy
Semantics
Examples
addAperiodicTrigger |
Add aperiodic trigger to task |
|
configuration |
deleteTrigger |
Delete aperiodic trigger from task |
|
configuration |
findTrigger |
Return trigger object |
map |
Map block to object |
unmap |
Remove mapping from block to |
|
specified object |
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
Create a Simulink.SoftwareTarget.TaskConfiguration object.
Alternatives
See Also
How To
%Create a new model new_system('MyModel');
%Open the new model open_system('MyModel');
configSet = Simulink.SoftwareTarget.concurrentExecution('MyModel',...
'AddConfigurationForConcurrentExecution'); % Access the task configuration object
taskConfig = configSet.concurrentExecutionComponents;
“Customize Concurrent Execution Settings”
Simulink.SoftwareTarget.TaskConfiguration.addAperiodicTrigger
| Simulink.SoftwareTarget.TaskConfiguration.deleteTrigger |
Simulink.SoftwareTarget.TaskConfiguration.map |
Simulink.SoftwareTarget.TaskConfiguration.unmap
• “Customize Concurrent Execution Settings”
7-282

Simulink.SoftwareTarget.Task
Superclasses
Purpose
Description
Properties
Copy
Semantics
Examples
Describe task that models unit of concurrent execution
The Simulink.SoftwareTarget.Task class describes a task that models a unit of concurrent execution.
Color
Color of the task icon.
Data Type: Vector of three doubles for an RGB triplet ([R,G,B]) Access: Read only
Name
Task name.
Data Type: string
Access: Read/write
Period
Period of task. This value must be a positive real number or a positive ratio.
Data Type: real Access: Read/write
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
Create a Simulink.SoftwareTarget.Task object for the sldemo_concurrent_execution model.
%Load example model sldemo_concurrent_execution
%Access its configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); % Access task configuration data
7-283

Simulink.SoftwareTarget.Task
Alternatives
See Also
How To
taskConfig = configSet.concurrentExecutionComponents; % Add a new task object
taskObject = taskConfig.Triggers(1).addTask('MyTask');
%Set the color of the task object taskObject.Color = [1 0 0];
%Delete the task object taskConfig.Triggers.deleteTask(taskObject);
“Customize Concurrent Execution Settings”
Simulink.SoftwareTarget.TaskConfiguration
• “Customize Concurrent Execution Settings”
7-284
Simulink.SoftwareTarget.Trigger
Purpose |
Base class for PeriodicTrigger and AperiodicTrigger |
Description |
Simulink.SoftwareTarget.Trigger is the base class for |
|
the Simulink.SoftwareTarget.PeriodicTrigger and |
|
Simulink.SoftwareTarget.AperiodicTrigger objects. |
Construction |
This is an abstract class. See |
|
Simulink.SoftwareTarget.AperiodicTrigger and |
|
Simulink.SoftwareTarget.PeriodicTrigger for concrete classes. |
Properties |
Name |
|
Name of trigger. |
|
Data Type: String |
|
Access: Read/write |
|
TriggerType |
|
Type of trigger. |
|
Data Type: Enumeration. Can be one of: |
|
• 'Periodic' |
|
• 'Aperiodic' |
|
Access: Read only |
|
Tasks |
|
Vector of tasks defined for this trigger. |
|
Data Type: Vector |
|
Access: Read only |
|
Color |
|
Color for rendering the trigger. |
|
Data Type: RGB vector of doubles ([R,G,B]) |
7-285

Simulink.SoftwareTarget.Trigger
Access: Read/write
Methods
addTask |
Add task to specified trigger |
deleteTask |
Delete specified task from trigger |
findTask |
Return task object |
Copy
Semantics
Alternatives
See Also
How To
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
“Customize Concurrent Execution Settings”
Simulink.SoftwareTarget.Trigger.addTask |
Simulink.SoftwareTarget.AperiodicTrigger |
Simulink.SoftwareTarget.PeriodicTrigger |
Simulink.SoftwareTarget.Trigger.deleteTask |
Simulink.SoftwareTarget.Trigger.findTask
• “Customize Concurrent Execution Settings”
7-286

Simulink.SoftwareTarget.WindowsEventHandler
Superclasses
Purpose
Description
Construction
Properties
Copy
Semantics
Examples
Describe aperiodic trigger for Windows targets
The Simulink.SoftwareTarget.WindowsEventHandler class describes an aperiodic trigger for one or more signals on Windows targets.
Create a Simulink.SoftwareTarget.WindowsEventHandler object by setting the EventHandlerType type of an aperiodic trigger object to Event (Windows). This object is created as a side effect and stored in the TargetObject property of the aperiodic trigger object.
EventName
Name associated with the aperiodic trigger. Specify a valid Windows path name component, excluding backslash (`\'), limited to MAX_PATH characters.
Data Type: String
Access: Read/write
Handle. To learn how handle classes affect copy operations, see Copying Objects in the MATLAB Programming Fundamentals documentation.
Create a Simulink.SoftwareTarget.WindowsEventHandler object.
% Open demo model sldemo_concurrent_execution % Access configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); % Access concurrent execution
taskConfig = configSet.concurrentExecutionComponents; % Add an aperiodic trigger
trigger = taskConfig.addAperiodicTrigger('MyTrigger'); trigger.EventHandlerType = 'Event (Windows)';
%Specify custom target
%Access the custom target data
7-287

Simulink.SoftwareTarget.WindowsEventHandler
trigger.TargetObject
See Also Simulink.SoftwareTarget.TaskConfiguration |
Simulink.SoftwareTarget.PosixSignalHandler |
Simulink.SoftwareTarget.Trigger.addTask
7-288

Simulink.SoftwareTarget.TaskConfiguration.addAperiodic
Purpose
Syntax
Description
Input
Arguments
Output
Arguments
Examples
Alternatives
See Also
Add aperiodic trigger to task configuration
aperiodic_trigger = addAperiodicTrigger(trigger_name)
aperiodic_trigger = addAperiodicTrigger(trigger_name) adds the aperiodic trigger, aperiodic_trigger, to the task configuration.
trigger_name
Name of trigger object.
Default: none
aperiodic_trigger
Aperiodic trigger object. If trigger_name is the name of another trigger object within the parent task configuration, the software makes trigger_name unique by appending the smallest integer, for example, aperiodic_trigger1.
Add an aperiodic trigger to the sldemo_concurrent_execution model.
%Load example model sldemo_concurrent_execution
%Access its configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); % Access task configuration data
taskConfig = configSet.concurrentExecutionComponents; % Add an aperiodic trigger
myTrigger = taskConfig.addAperiodicTrigger('MyTrigger') % Set the name of the newly added aperiodic trigger myTrigger.Name = 'MyTrigger';
“Customize Concurrent Execution Settings”
Simulink.SoftwareTarget.TaskConfiguration |
Simulink.SoftwareTarget.TaskConfiguration.deleteTrigger
7-289

Simulink.SoftwareTarget.TaskConfiguration.addAperiodicTrigg
| Simulink.SoftwareTarget.TaskConfiguration.map |
Simulink.SoftwareTarget.TaskConfiguration.unmap
How To |
• “Customize Concurrent Execution Settings” |
7-290

Simulink.SoftwareTarget.TaskConfiguration.deleteTrigger
Purpose |
Delete aperiodic trigger from task configuration |
Syntax |
deleteTrigger(trigger_name) |
|
deleteTrigger(trigger_number) |
Description |
deleteTrigger(trigger_name) deletes the specified aperiodic |
|
trigger, trigger_name, from the task configuration. This method |
|
returns an error if trigger_name is the first periodic trigger in the |
|
task configuration, or if trigger_name does not exist in the task |
|
configuration. |
|
deleteTrigger(trigger_number) deletes the specified aperiodic |
|
trigger, trigger_number, from the task configuration. This method |
|
returns an error if trigger_number is the first periodic trigger in |
|
the task configuration, or if trigger_number does not exist in the |
|
task configuration. |
Input |
trigger_name |
Arguments |
Name of trigger object. |
|
|
|
Default: none |
|
trigger_number |
|
Index number of trigger object. |
Examples |
Delete trigger by trigger number. |
|
triggers = taskConfiguration.Triggers |
|
for i=2:length(triggers) |
|
taskConfiguration.deleteTrigger(triggers(i)) |
|
end |
7-291

Simulink.SoftwareTarget.TaskConfiguration.deleteTrigger
See Also Simulink.SoftwareTarget.TaskConfiguration |
Simulink.SoftwareTarget.TaskConfiguration.addAperiodicTrigger
| Simulink.SoftwareTarget.TaskConfiguration.map |
Simulink.SoftwareTarget.TaskConfiguration.unmap
7-292

Simulink.SoftwareTarget.TaskConfiguration.findTrigger
Purpose
Syntax
Description
Input
Arguments
Output
Arguments
See Also
Return trigger object
aperiodic_trigger = findTrigger(trigger_name)
aperiodic_trigger = findTrigger(trigger_name) returns the specified trigger object.
trigger_name
Name of trigger object.
Default: none
aperiodic_trigger
Aperiodic trigger object.
Simulink.SoftwareTarget.TaskConfiguration |
Simulink.SoftwareTarget.TaskConfiguration.deleteTrigger
| Simulink.SoftwareTarget.TaskConfiguration.map |
Simulink.SoftwareTarget.TaskConfiguration.unmap
7-293

Simulink.SoftwareTarget.TaskConfiguration.map
Purpose
Syntax
Description
Input
Arguments
Map block to object
map(block_handle,task_object) map(block_handle,aperiodic_object) map(block_handle,trigger_number, task_name) map(block_handle,trigger_name, task_name) map(block_handle,trigger_name) map(block_handle,trigger_number)
map(block_handle,task_object) maps the given block to the task object.
map(block_handle,aperiodic_object) maps the given block to the aperiodic trigger object.
map(block_handle,trigger_number, task_name) maps the given block to the task object, as identified by the trigger number and task name.
map(block_handle,trigger_name, task_name) maps the given block to the task object, as identified by the trigger name and task name.
map(block_handle,trigger_name) maps the given block to the aperiodic trigger object, as identify by the trigger name, in the task configuration.
map(block_handle,trigger_number) maps the given block to the aperiodic trigger object, as identified by the trigger number, in the task configuration.
block_handle
Handle (double) of block to map.
task_object
Task object to map to block_handle.
aperiodic_object
Aperiodic task object to map to block_handle.
7-294
Simulink.SoftwareTarget.TaskConfiguration.map
Examples
Alternatives
See Also
trigger_number
Identifier of trigger object.
task_name
Name of task to associate with the trigger to identify the task object.
trigger_name
Name of trigger object.
Default: none
Create a new task and map a block to the new task.
% Open demo model sldemo_concurrent_execution % Get the configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); taskConfig = configSet.concurrentExecutionComponents;
% Get the block of interest
block = get_param('sldemo_concurrent_execution/Plant', 'Handle'); % Create a new task
newTask = taskConfig.Triggers(1).addTask('NewTask'); newTask.Period = '0.1';
%Get the task to which plant was mapped to
oldTask = taskConfig.Triggers(1).findTask('Plant');
%Map the plant block to the new task taskConfig.unmap(block, oldTask); taskConfig.map(block, newTask);
“Customize Concurrent Execution Settings”
Simulink.SoftwareTarget.TaskConfiguration |
Simulink.SoftwareTarget.TaskConfiguration.addAperiodicTriger
| Simulink.SoftwareTarget.TaskConfiguration.deleteTrigger |
Simulink.SoftwareTarget.TaskConfiguration.unmap
7-295

Simulink.SoftwareTarget.TaskConfiguration.map
How To |
• “Customize Concurrent Execution Settings” |
7-296

Simulink.SoftwareTarget.TaskConfiguration.unmap
Purpose
Syntax
Description
Input
Arguments
Remove mapping from block to specified object
unmap(block_handle,task_object) unmap(block_handle,aperiodic_object) unmap(block_handle,trigger_number, task_name) unmap(block_handle,trigger_name, task_name) unmap(block_handle,trigger_name) unmap(block_handle,trigger_number)
unmap(block_handle,task_object) removes the mapping from the given block to the task object.
unmap(block_handle,aperiodic_object) removes the mapping from the given block to the aperiodic trigger object.
unmap(block_handle,trigger_number, task_name) removes the mapping from the given block to the task object, as identified by the trigger number and task name.
unmap(block_handle,trigger_name, task_name) removes the mapping from the given block to the task object, as identified by the trigger name and task name.
unmap(block_handle,trigger_name) removes the mapping from the given block to the aperiodic trigger object, as identified by the trigger name, in the task configuration.
unmap(block_handle,trigger_number) removes the mapping from the given block to the aperiodic trigger object, as identified by the trigger number, in the task configuration.
block_handle
Handle (double) of block from which to remove mapping.
task_object
Task object from which to remove mapping.
aperiodic_object
7-297

Simulink.SoftwareTarget.TaskConfiguration.unmap
Examples
See Also
Aperiodic task object from which to remove mapping.
trigger_number
Identifier of trigger object.
task_name
Name of task to associate with the trigger to identify the task object.
trigger_name
Name of trigger object.
Default: none
Create a new task, map a block to the new task, and then unmap the block.
% Open demo model sldemo_concurrent_execution % Get the configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); taskConfig = configSet.concurrentExecutionComponents;
% Get the block of interest
block = get_param('sldemo_concurrent_execution/Plant', 'Handle'); % Create a new task
newTask = taskConfig.Triggers(1).addTask('NewTask'); newTask.Period = '0.1';
%Get the task to which plant was mapped to
oldTask = taskConfig.Triggers(1).findTask('Plant');
%Map the plant block to the new task taskConfig.unmap(block, oldTask); taskConfig.map(block, newTask);
Simulink.SoftwareTarget.TaskConfiguration |
Simulink.SoftwareTarget.TaskConfiguration.addAperiodicTrigger
| Simulink.SoftwareTarget.TaskConfiguration.deleteTrigger |
Simulink.SoftwareTarget.TaskConfiguration.map
7-298

Simulink.SoftwareTarget.Trigger.addTask
Purpose
Syntax
Description
Input
Arguments
Output
Arguments
Examples
Alternatives
Add task to specified trigger
addTask(task_name)
addTask(task_name) adds a task to the trigger. If task_name already exists, the method renames the task to the next available incremental name, such as task_name1.
task_name
Name of task to associate with the trigger to identify the task object.
task_object
Task object, with name task_name, associated with the trigger.
Create a new task.
% Open demo model sldemo_concurrent_execution % Get the configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); taskConfig = configSet.concurrentExecutionComponents;
% Get the block of interest
block = get_param('sldemo_concurrent_execution/Plant', 'Handle'); % Create a new task
newTask = taskConfig.Triggers(1).addTask('NewTask'); newTask.Period = '0.1';
%Get the task to which plant was mapped to
oldTask = taskConfig.Triggers(1).findTask('Plant');
%Map the plant block to the new task taskConfig.unmap(block, oldTask); taskConfig.map(block, newTask);
“Customize Concurrent Execution Settings”
7-299

Simulink.SoftwareTarget.Trigger.addTask
See Also |
Simulink.SoftwareTarget.Trigger | |
|
Simulink.SoftwareTarget.Trigger.deleteTask | |
|
Simulink.SoftwareTarget.Trigger.findTask |
How To |
• “Customize Concurrent Execution Settings” |
7-300

Simulink.SoftwareTarget.Trigger.deleteTask
Purpose
Syntax
Description
Input
Arguments
Examples
See Also
Delete specified task from trigger
deleteTask(task_name) deleteTask(task_object)
deleteTask(task_name) deletes a task, task_name, from the trigger. The method returns an error if the task does not exist in the trigger.
deleteTask(task_object) deletes a task object from the trigger.
task_name
Name of task to associate with the trigger to identify the task object.
task_object
Task object to remove from the trigger.
Create a new task and then delete the task.
%Load example model sldemo_concurrent_execution
%Access its configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); % Access task configuration data
taskConfig = configSet.concurrentExecutionComponents; % Add a new task object
taskObject = taskConfig.Triggers(1).addTask('MyTask');
%Set the color of the task object taskObject.Color = [1 0 0];
%Delete the task object taskConfig.Triggers(1).deleteTask(taskObject);
Simulink.SoftwareTarget.Trigger |
Simulink.SoftwareTarget.Trigger.addTask |
Simulink.SoftwareTarget.Trigger.findTask
7-301

Simulink.SoftwareTarget.Trigger.findTask
Purpose
Syntax
Description
Input
Arguments
Output
Arguments
Examples
Return task object
task_object = findTask(task_name)
task_object = findTask(task_name) returns the specified task object. The method returns an error if it does not find a task with the specified name.
task_name
Name of task to associate with the trigger to identify the task object.
task_object
Task object found.
Create a new task and find the old task.
% Open demo model sldemo_concurrent_execution % Get the configuration set
configSet = getActiveConfigSet('sldemo_concurrent_execution'); taskConfig = configSet.concurrentExecutionComponents;
% Get the block of interest
block = get_param('sldemo_concurrent_execution/Plant', 'Handle'); % Create a new task
newTask = taskConfig.Triggers(1).addTask('NewTask'); newTask.Period = '0.1';
%Get the task to which plant was mapped to
oldTask = taskConfig.Triggers(1).findTask('Plant');
%Map the plant block to the new task taskConfig.unmap(block, oldTask); taskConfig.map(block, newTask);
%Delete task
taskConfig.Triggers(1).deleteTask('NewTask')
7-302

Simulink.SoftwareTarget.Trigger.findTask
See Also Simulink.SoftwareTarget.Trigger |
Simulink.SoftwareTarget.Trigger.addTask |
Simulink.SoftwareTarget.Trigger.deleteTask
7-303

Simulink.SubsysDataLogs
Purpose |
Container for subsystem’s signal data logs |
Description
Note The Simulink.SubsysDataLogs class is used in conjunction with the ModelDataLogs logging data format. The ModelDataLogs format is supported for backwards compatibility. The ModelDataLogs format will be removed in a future release.
For new models, use the Dataset logging format.
Simulink software creates instances of this class to contain logs for signals belonging to a subsystem (see “Export Signal Data Using Signal Logging”). Objects of this class have a variable number of properties. The first property, named Name, is the name of the subsystem whose log data this object contains. The remaining properties are signal
log or signal log container objects containing the data logged for the subsystem specified by this object’s Name property.
Consider, for example, the following model.
After simulation of this model, the MATLAB workspace contains a
Simulink.ModelDataLogs object, named logsout, that contains a
7-304
Simulink.SubsysDataLogs
Simulink.SubsysDataLogs object, named Gain, that contains the log data for signals a and m in the subsystem named Gain.
>> logsout.Gain |
|
|
ans = |
|
|
Simulink.SubsysDataLogs (Gain): |
|
|
Name |
elements |
Simulink Class |
a |
1 |
Timeseries |
m |
2 |
TsArray |
You can use either fully qualified log names or the unpack command to access the signal logs contained by a SubsysDataLogs object. For example, to access the amplitudes logged for signal a in the preceding example, you could enter the following at the MATLAB command line:
>> data = logsout.Gain.a.Data;
or
>> logsout.unpack('all'); data = a.Data;
See Also “Signal Logging”, Simulink.ModelDataLogs, Simulink.ScopeDataLogs, Simulink.Timeseries, Simulink.TsArray, Simulink.SimulationData.Dataset, who, whos, unpack
7-305

Simulink.TimeInfo
Purpose
Description
Properties
Provide information about time data in Simulink.Timeseries object
Simulink software creates instances of these objects to describe the time data that it includes in Simulink.Timeseries objects.
|
Name |
Access |
Description |
|
|
Units |
RW |
The units, e.g., 'seconds', in which the |
|
|
|
|
time series data are expressed in the |
|
|
|
|
associated Simulink.Timeseries object. |
|
|
Start |
RW |
If the associated signal is not in a |
|
|
|
|
conditionally executed subsystem, this |
|
|
|
|
field contains the simulation time of |
|
|
|
|
the first signal value recorded in the |
|
|
|
|
associated Simulink.Timeseries object. |
|
|
|
|
If the signal is in a conditionally executed |
|
|
|
|
subsystem, this field contains an array of |
|
|
|
|
times when the system became active. |
|
|
end |
RW |
If the associated signal is not in a |
|
|
|
|
conditionally executed subsystem, this |
|
|
|
|
field contains the simulation time of the |
|
|
|
|
last signal value recorded in the associated |
|
|
|
|
Simulink.Timeseries object. If the signal |
|
|
|
|
is in a conditionally executed subsystem, |
|
|
|
|
this field contains an array of times when |
|
|
|
|
the system became inactive. |
|
7-306

Simulink.TimeInfo
|
Name |
Access |
Description |
|
|
Increment |
RW |
The interval between simulation times |
|
|
|
|
at which signal data is logged in the |
|
|
|
|
associated Simulink.Timeseries object. |
|
|
|
|
If the signal is aperiodic (continuous signal |
|
|
|
|
with variable-step solver), this property |
|
|
|
|
has a value of NaN. A signal is periodic if it |
|
|
|
|
has a discrete sample time (not continuous |
|
|
|
|
or constant) or is continuous with a |
|
|
|
|
fixed-step solver. |
|
|
Length |
W |
The number of signal samples recorded |
|
|
|
|
in the associated Simulink.Timeseries |
|
|
|
|
object, i.e., the length of the arrays |
|
|
|
|
referenced by the object’s Time and Data |
|
|
|
|
properties. |
|
See Also Simulink.Timeseries , Simulink.SimulationData.Dataset
7-307

Simulink.Timeseries
Purpose
Description
Properties
See Also
Store data for any signal except mux or bus signal
Simulink software creates instances of this class to store signal data that it logs for any signal except a mux or bus signal, which are stored in a Simulink.TsArray. See “Export Signal Data Using Signal Logging” for more information.
|
Name |
Access |
Description |
|
|
Name |
RW |
Name of this signal log. |
|
|
BlockPath |
RW |
Path of the block that output the signal |
|
|
|
|
logged in this signal log. |
|
|
PortIndex |
RW |
Index of the output port that emitted the |
|
|
|
|
signal logged in this signal log. |
|
|
SignalName |
RW |
Name of the signal logged in this signal |
|
|
|
|
log. |
|
|
ParentName |
RW |
Name of the parent of the signal recorded |
|
|
|
|
in this log, if the signal is an element of a |
|
|
|
|
mux or a virtual bus; otherwise, the same |
|
|
|
|
as SignalName. |
|
|
TimeInfo |
RW |
An object of Simulink.TimeInfo class |
|
|
|
|
that describes the time data in this log. |
|
|
Time |
RW |
An array containing the simulation times |
|
|
|
|
at which signal data was logged. |
|
|
Data |
RW |
An array containing the signal data. |
|
|
|
|
|
|
“Export Signal Data Using Signal Logging”, Simulink.TimeInfo,
Simulink.SimulationData.Dataset, Simulink.ModelDataLogs, Simulink.SubsysDataLogs, Simulink.ScopeDataLogs, Simulink.TsArray, who, whos, unpack
7-308

Simulink.TsArray
Purpose |
Store data for mux or bus signal |
Description Simulink software creates instances of this class to contain the data that it logs for a mux or bus signal. Other types of signals are stored in a Simulink.Timeseries. See “Export Signal Data Using Signal Logging” for more information.
Objects of the Simulink.TsArray class have a variable number of properties. The first property, called Name, specifies the log name of the logged signal. The remaining properties reference logs for the elements of the logged signal: Simulink.Timeseries objects for elementary signals and Simulink.TSArray objects for mux or bus signals. The name of each property is the log name of the corresponding signal.
For example, consider the following model.
This model specifies that Simulink software should log the values of the signal b2 during simulation. After simulation of this model, the MATLAB workspace contains a Simulink.ModelDataLogs object, named logsout, that contains a Simulink.TsArray object, named b2, that contains the logs for the elements of b2, i.e., for the elementary signal x1 and the bus signal b1. entering the fully qualified name of the Simulink.TsArray object, i.e., logsout.b2, at the MATLAB command line reveals the structure of the signal log for this model.
7-309

Simulink.TsArray
>> logsout.b2 |
|
|
Simulink.TsArray (untitled/Bus Creator1): |
||
Name |
elements |
Simulink Class |
x1 |
1 |
Timeseries |
b1 |
2 |
TsArray |
|
You can use either fully qualified log names or the unpack command |
|
to access the signal logs contained by a Simulink.TsArray object. For |
|
example, to access the amplitudes logged for signal x1 in the preceding |
|
example, you could enter the following at the MATLAB command line: |
|
>> data = logsout.b2.x1.Data; |
|
or |
|
>> logsout.unpack('all'); |
|
data = x1.Data; |
See Also |
“Export Signal Data Using Signal Logging”,Simulink.ModelDataLogs, |
|
Simulink.SubsysDataLogs, Simulink.ScopeDataLogs, |
|
Simulink.Timeseries, Simulink.SimulationData.Dataset, who, |
|
whos, unpack |
7-310

Simulink.Variant
Purpose |
Specify a model reference variant and its execution environment |
Description |
A Simulink.Variant object specifies a variant object, which is defined |
|
using a Boolean expression called a variant condition. A Model Variants |
|
block and a Variant Subsystem block use variant objects to associate an |
|
execution environment with each of its variants. |
|
The variant condition references MATLAB variables and/or Simulink |
|
parameter objects in the base workspace called variant control |
|
variables. The variant condition must evaluate to true or false when |
|
the model is compiled. |
|
For a given Model Variants block or Variant Subsystem block, you |
|
must define the variant objects so that only one evaluates to true. The |
|
variant object, whose variant condition evaluates to true, is the active |
|
variant for that variant block. |
Construction |
variant=Simulink.Variant(VariantCondition) creates a variant |
|
object in the base workspace. The object name is variant, and the |
|
associated variant condition is VariantCondition. The object can have |
|
any unique legal MATLAB name. |
|
The VariantCondition must be a Boolean expression that references at |
|
least one base workspace variable or parameter. A variant condition |
|
can include scalar variables, enumerated values, the operators ==, |
|
!=, &&, ||, ~, as well as parentheses for grouping. If you specify the |
|
condition literally, surround it with single quotes. |
|
You can also create a variant object using the Model explorer. Select |
|
the Base Workspace, choose Add > Simulink.Variant, and specify |
|
the desired name and variant condition in the Contents and Dialog |
|
panes. If you specify the condition literally, do not surround it with |
|
single quotes (unlike the MATLAB API, which requires single quotes). |
Properties |
|
|
Condition |
|
Description |
|
The Boolean expression associated with the variant object. |
7-311

Simulink.Variant
Examples
See Also
Access
RW
Create a variant object with a variant condition:
GU=Simulink.Variant('Fuel==1 && Emis==1')
•“About Variant Objects”
•“Variant Systems”
7-312

Simulink.WorkspaceVar
Purpose
Description
Tip
Fields
Contains information about workspace variables and blocks that use them
Note Simulink.WorkspaceVar will be removed in a future release. Use Simulink.VariableUsage instead.
A Simulink.WorkspaceVar object describes attributes of a workspace variable and lists the blocks that use the variable. The Simulink.findVars function returns one or more
Simulink.WorkspaceVar objects that embody the results of searching for variables.
Only a Simulink.WorkspaceVar constructor can set any field value in a Simulink.WorkspaceVar object. The fields are otherwise read-only.
Name
The name of the variable described by the
Simulink.WorkspaceVar object
Workspace
The name of the workspace in which the variable resides, for example:
|
|
Workspace value |
Meaning |
|
|
|
'base |
The MATLAB base workspace |
|
|
|
workspace' |
|
|
|
|
'MyModel' |
The model workspace for the model |
|
|
|
|
MyModel. |
|
|
|
'MyModel/Mask1' |
The mask workspace for the masked block |
|
|
|
|
Mask1 in the model MyModel. |
|
WorkspaceType |
|
|
||
7-313

Simulink.WorkspaceVar
Construction
Methods
Examples
The type of workspace in which the variable resides. The possible values are:
•'base'
•'model'
•'mask'
UsedByBlocks
A cell array of strings. Each string names a block that uses the variable. Simulink.findVars populates this field.
var = Simulink.WorkspaceVar (VarName, WkspName), where both arguments are strings, returns a Simulink.WorkspaceVar object with Name VarName and Workspace WkspName. The inputs need not exist in the model. Simulink will provide a WorkspaceType automatically.
vars = Simulink.WorkspaceVar (VarNames, WkspName), where VarNames is a cell array of strings, returns a vector of Simulink.WorkspaceVar objects, each with a specified name and
Workspace = WkspName.
[VarsOut] = VarsIn1.setdiff (VarsIn2) — Calls setdiff to return the difference between VarsIn1 and VarsIn2. The arguments and return value are vectors of Simulink.WorkspaceVar objects.
[VarsOut] = VarsIn1.intersect (VarsIn2) — Calls intersect to return the intersection between VarsIn1 and VarsIn2. The arguments and return value are vectors of Simulink.WorkspaceVar objects.
Create a Simulink.WorkspaceVar object for the variable 'k' in the base workspace.
var = Simulink.WorkspaceVar('k', 'base workspace');
Return a vector of Simulink.WorkspaceVar objects, one object for each variable returned by who.
7-314
Simulink.WorkspaceVar
[vars] = Simulink.WorkspaceVar (who, WkspName)
Return a vector of Simulink.WorkspaceVar objects, one object for each variable returned by whos.
[vars] = Simulink.WorkspaceVar (who, WkspName)
Create a vector of Simulink.WorkspaceVar objects that describes all the variables in a model workspace
hws = get_param('mymodel', 'ModelWorkspace'); vars=Simulink.WorkspaceVar(hws.whos, 'MyModel')
Create a vector of Simulink.WorkspaceVar objects that describes all the variables in a mask workspace
maskVars = get_param('mymodel/maskblock', 'MaskWSVariables'); vars = Simulink.WorkspaceVar(maskVars, 'mymodel/maskblock');
See Also • Simulink.findVars
•setdiff
•intersect
7-315

Simulink.VariableUsage
Purpose
Tip
Description
Construction
Properties
Get information about workspace variables and blocks that use them
Only a Simulink.VariableUsage constructor can set any field value in a Simulink.VariableUsage object. The fields are otherwise read-only.
Create a Simulink.VariableUsage object to get the attributes of a workspace variable and determine the blocks that use the variable.
Create a Simulink.VariableUsage object as follows.
var = Simulink.VariableUsage (VarName, WkspName), where both arguments are strings, returns a Simulink.VariableUsage object with Name VarName and Workspace WkspName. The inputs need not exist in the model. Simulink will provide a WorkspaceType automatically.
vars = Simulink.VariableUsage (VarNames, WkspName), where VarNames is a cell array of strings, returns a vector of Simulink.VariableUsage objects, each with a specified name and
Workspace = WkspName.
Name
The name of the variable described by the
Simulink.VariableUsage object
Workspace
The name of the workspace in which the variable resides, for example:
|
Workspace value |
Meaning |
|
|
'base |
The MATLAB base workspace |
|
|
workspace' |
|
|
|
'MyModel' |
The model workspace for the model |
|
|
|
MyModel. |
|
|
'MyModel/Mask1' |
The mask workspace for the masked block |
|
|
|
Mask1 in the model MyModel. |
|
7-316

Simulink.VariableUsage
Methods
Examples
WorkspaceType
The type of workspace in which the variable resides. The possible values are:
•'base workspace'
•'model'
•'mask'
UsedByBlocks
A cell array of strings. Each string names a block that uses the variable. Simulink.findVars populates this field.
[VarsOut] = VarsIn1.setdiff (VarsIn2) — Calls setdiff to return the difference between VarsIn1 and VarsIn2. The arguments and return value are vectors of Simulink.VariableUsage objects.
[VarsOut] = VarsIn1.intersect (VarsIn2) — Calls intersect to return the intersection between VarsIn1 and VarsIn2. The arguments and return value are vectors of Simulink.VariableUsage objects.
Create a Simulink.VariableUsage object for the variable 'k' in the base workspace.
var = Simulink.VariableUsage('k', 'base workspace');
Return a vector of Simulink.VariableUsage objects, one object for each variable returned by who.
[vars] = Simulink.VariableUsage (who, WkspName)
Return a vector of Simulink.VariableUsage objects, one object for each variable returned by whos.
[vars] = Simulink.VariableUsage (who, WkspName)
7-317

Simulink.VariableUsage
|
Create a vector of Simulink.VariableUsage objects that describes all |
|
|
the variables in a model workspace |
|
|
hws = get_param('mymodel', 'ModelWorkspace'); |
|
|
vars=Simulink.VariableUsage(hws.whos, 'MyModel') |
|
|
|
|
|
Create a vector of Simulink.VariableUsage objects that describes all |
|
|
the variables in a mask workspace |
|
|
maskVars = get_param('mymodel/maskblock', 'MaskWSVariables'); |
|
|
vars = Simulink.VariableUsage(maskVars, 'mymodel/maskblock'); |
|
See Also |
Simulink.findVars | setdiff | intersect |
|
7-318

Simulink.ModelManagement.Project.CurrentProject.loadP
Purpose |
Load an existing Simulink project and close any currently open project |
Syntax |
p = Simulink.ModelManagement.Project.CurrentProject() |
|
p.loadProject(pathtoprojectfolder) |
Description |
p = Simulink.ModelManagement.Project.CurrentProject() creates |
|
an instance of the CurrentProject class. |
|
p.loadProject(pathtoprojectfolder) loads the Simulink project in |
|
the pathtoprojectfolder specified. |
|
Loading a project closes any currently open project. If the currently |
|
open project is configured to run shutdown shortcuts, the shutdown |
|
tasks run before loading the next project. |
Input |
pathtoprojectfolder |
Argument |
The complete path to the folder that contains the |
|
.SimulinkProject folder. |
Example |
To load an existing Simulink project, use the following commands. |
|
1 Create an instance of the CurrentProject class. |
|
p = Simulink.ModelManagement.Project.CurrentProject(); |
|
2 Use the loadProject method specifying the path to your project |
|
folder (that contains the .SimulinkProject folder), for example: |
|
p.loadProject('C:\work\airframe'); |
See Also |
Simulink.ModelManagement.Project.CurrentProject |
7-319

Simulink.ModelManagement.Project.CurrentProject.isProjectLo
Purpose |
Return true when a Simulink project is loaded and false when no |
|
project is loaded |
Syntax |
p = Simulink.ModelManagement.Project.CurrentProject() |
|
isLoaded = p.isProjectLoaded |
Description |
p = Simulink.ModelManagement.Project.CurrentProject() creates |
|
an instance of the CurrentProject class. |
|
isLoaded = p.isProjectLoaded returns 1 or 0 depending on whether |
|
a Simulink project is loaded or not loaded, respectively. |
Example |
To determine if a Simulink project is loaded, use the following |
|
commands. |
|
1 Create an instance of the CurrentProject class. |
|
p = Simulink.ModelManagement.Project.CurrentProject(); |
|
2 Use the isProjectLoaded method. |
|
isLoaded = p.isProjectLoaded; |
|
isLoaded = 0 indicates that no Simulink project is loaded |
|
isLoaded = 1 indicates a Simulink project is loaded |
See Also |
Simulink.ModelManagement.Project.CurrentProject |
7-320

Simulink.ModelManagement.Project.CurrentProject.getRo
Purpose |
Get the name of the root folder for the currently open Simulink project |
Syntax
Description
Example
See Also
Note getRootDirectory will be removed in a future release. Use getRootFolder instead.
p = Simulink.ModelManagement.Project.CurrentProject() p.getRootDirectory
p = Simulink.ModelManagement.Project.CurrentProject() creates an instance of the CurrentProject class.
p.getRootDirectory returns the name of the root folder for the currently open Simulink project.
This method is particularly useful when creating start up and shutdown scripts, or functions, for a project. Use this method to determine the project root folder so that sub-folders of the project can be added to the MATLAB path without using absolute paths.
To get the name of the root folder for the currently open Simulink project, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Use the getRootDirectory method. p.getRootDirectory;
Simulink.ModelManagement.Project.CurrentProject
7-321

Simulink.ModelManagement.Project.CurrentProject.getRootFol
Purpose |
Get the name of the root folder for the currently open Simulink project |
Syntax |
p = Simulink.ModelManagement.Project.CurrentProject() |
|
p.getRootFolder |
Description |
p = Simulink.ModelManagement.Project.CurrentProject() creates |
|
an instance of the CurrentProject class. |
|
p.getRootFolder returns the name of the root folder for the currently |
|
open Simulink project. |
|
This method is particularly useful when creating start up and shutdown |
|
scripts, or functions, for a project. Use this method to determine the |
|
project root folder so that sub-folders of the project can be added to the |
|
MATLAB path without using absolute paths. |
Example |
To get the name of the root folder for the currently open Simulink |
|
project, use the following commands. |
|
1 Create an instance of the CurrentProject class. |
|
p = Simulink.ModelManagement.Project.CurrentProject(); |
|
2 Use the getRootFolder method. |
|
p.getRootFolder; |
See Also |
Simulink.ModelManagement.Project.CurrentProject |
7-322

Simulink.ModelManagement.Project.CurrentProject.getPro
Purpose |
Get the name of the currently open Simulink project |
Syntax |
p = Simulink.ModelManagement.Project.CurrentProject() |
|
name = p.getProjectName |
Description |
p = Simulink.ModelManagement.Project.CurrentProject() creates |
|
an instance of the CurrentProject class. |
|
name = p.getProjectName returns the name of the currently open |
|
Simulink project. |
Example |
To get the name of the currently open Simulink project, use the |
|
following commands. |
|
1 Create an instance of the CurrentProject class. |
|
p = Simulink.ModelManagement.Project.CurrentProject(); |
|
2 Use the getProjectName method. |
|
name = p.getProjectName; |
See Also |
Simulink.ModelManagement.Project.CurrentProject |
7-323

Simulink.ModelManagement.Project.CurrentProject.getLabels
Purpose |
Get a list of labels in a category in the currently open Simulink project |
Syntax |
p = Simulink.ModelManagement.Project.CurrentProject() |
|
labels = p.getLabels(category) |
Description |
p = Simulink.ModelManagement.Project.CurrentProject() creates |
|
an instance of the CurrentProject class. |
|
labels = p.getLabels(category) returns an array of label names in |
|
a specified category in the currently open Simulink project. |
Input |
category |
Argument |
The name of a category in the currently open Simulink project. |
|
Examples • To get a list of labels in category Review in the currently open Simulink project, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Use the getLabels method.
labels = p.getLabels('Review');
3To view the cell array containing the category names, use labels{:}
•To display all the labels within the currently open Simulink project, run the following code.
p = Simulink.ModelManagement.Project.CurrentProject(); categories = p.getCategories;
for jj = 1:numel(categories) thisCategory = categories{jj}; disp([thisCategory ' : ']);
labels = p.getLabels(thisCategory);
7-324
Simulink.ModelManagement.Project.CurrentProject.getLa
for kk = 1:numel(labels) thisLabel = labels(kk); disp([' - ' thisLabel.Name]);
end
end
See Also Simulink.ModelManagement.Project.CurrentProject
7-325

Simulink.ModelManagement.Project.CurrentProject.getFilesInP
Purpose
Syntax
Description
Example
See Also
Get a list of files in the currently open Simulink project
p = Simulink.ModelManagement.Project.CurrentProject() projFiles = p.getFilesInProject
projFiles = p.getFilesInProject(includeFolders)
p = Simulink.ModelManagement.Project.CurrentProject() creates an instance of the CurrentProject class.
projFiles = p.getFilesInProject returns a cell array of strings containing the fully qualified filenames of all the files and the folders in the currently open Simulink project.
projFiles = p.getFilesInProject(includeFolders) specifies whether to include folders in the list of project files. includeFolders is an optional logical input specifying whether to include folders (true) or exclude folders (false). Default: true.
To get the names of files in the currently open Simulink project, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject()
2Use the getFilesInProject method. projFiles = p.getFilesInProject;
3To view the cell array containing the file names, use projFiles{:}
4Use the getFilesInProject method and exclude folders. projFiles = p.getFilesInProject(false);
Simulink.ModelManagement.Project.CurrentProject
7-326

Simulink.ModelManagement.Project.CurrentProject.getCa
Purpose |
Get a list of the categories of file labels in the currently open Simulink |
|
project |
Syntax |
p = Simulink.ModelManagement.Project.CurrentProject() |
|
categories = p.getCategories |
Description |
p = Simulink.ModelManagement.Project.CurrentProject() creates |
|
an instance of the CurrentProject class. |
|
categories = p.getCategories returns a cell array of category names |
|
in the currently open Simulink project. |
Example |
To get a list of categories in the currently open Simulink project, use |
|
the following commands. |
|
1 Create an instance of the CurrentProject class. |
|
p = Simulink.ModelManagement.Project.CurrentProject(); |
|
2 Use the getCategories method. |
|
categories = p.getCategories; |
|
3 To view the cell array containing the category names, use |
|
categories{:} |
See Also |
Simulink.ModelManagement.Project.CurrentProject |
7-327

Simulink.ModelManagement.Project.CurrentProject.getAttache
Purpose |
Get a list of labels attached to a file in the currently open Simulink |
|
project |
Syntax |
p = Simulink.ModelManagement.Project.CurrentProject() |
|
labels = p.getAttachedLabels(filePath) |
Description |
p = Simulink.ModelManagement.Project.CurrentProject() creates |
|
an instance of the CurrentProject class. |
Input
Argument
Example
See Also
labels = p.getAttachedLabels(filePath) returns an array of label objects for a file specified using filePath.
filePath
The fully qualified path to the file within the root folder of the project.
To get a list of labels in a file in the currently open Simulink project, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Create a fully qualified path for the file.
Note The use of the getRootDirectory method in this step is optional.
file = fullfile(p.getRootDirectory, 'work', 'myExample.c');
3Use the getAttachedLabels method. labels = p.getAttachedLabels(file);
Simulink.ModelManagement.Project.CurrentProject
7-328

Simulink.ModelManagement.Project.CurrentProject.detac
Purpose |
Remove a label from a file in the currently open Simulink project |
Syntax p = Simulink.ModelManagement.Project.CurrentProject()
p.detachLabelFromFile(filePath,labelObj)
Description p = Simulink.ModelManagement.Project.CurrentProject() creates an instance of the CurrentProject class.
Input
Argument
Example
p.detachLabelFromFile(filePath,labelObj) removes a label from a file specified using filePath using the label object labelObj .
filePath
The fully qualified path to the file from which the label is to be removed.
labelObj
The label object used to remove the label from the file.
To remove a label from a file labelled with review status Approved, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Create a fully qualified path for the file.
Note The use of the getRootDirectory method in this step is optional.
file = fullfile(p.getRootDirectory, 'work', 'myExample.c');
3Create a label object.
labelObj = Simulink.ModelManagement.Project.Label('Review','Approve
7-329

Simulink.ModelManagement.Project.CurrentProject.detachLabe
4Use the detachLabelFromFile method. p.detachLabelFromFile(file,labelObj);
See Also Simulink.ModelManagement.Project.CurrentProject
7-330

Simulink.ModelManagement.Project.CurrentProject.create
Purpose
Syntax
Description
Input
Argument
Examples
Create a label in a category in the currently open Simulink project
p = Simulink.ModelManagement.Project.CurrentProject() labelObj = Simulink.ModelManagement.Project.Label(categoryName
,labelName);
p.createLabel(labelObj)
p = Simulink.ModelManagement.Project.CurrentProject() creates an instance of the CurrentProject class.
labelObj =
Simulink.ModelManagement.Project.Label(categoryName,labelName); creates a label object named labelObj for the category categoryName.
p.createLabel(labelObj) creates the label in the category.
If the category for the new label does not exist, it is created with the label object.
categoryName
The name of the category in which the new label is to be added.
labelName
The name of the new label.
To create a new label John in category Owner in the currently open Simulink project, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Create a label object.
labelObj= Simulink.ModelManagement.Project.Label('Owner','John');
3Add the label to the category.
7-331

Simulink.ModelManagement.Project.CurrentProject.createLabe
p.createLabel(labelObj);
See Also Simulink.ModelManagement.Project.CurrentProject
7-332

Simulink.ModelManagement.Project.CurrentProject.create
Purpose |
Create a category in the currently open Simulink project |
Syntax p = Simulink.ModelManagement.Project.CurrentProject()
p.createCategory(categoryName)
Description p = Simulink.ModelManagement.Project.CurrentProject() creates an instance of the CurrentProject class.
Input
Argument
Examples
See Also
p.createCategory(categoryName) creates a category named categoryName in the currently open Simulink project.
The new category is created immediately. If you are using a version control tool for your project, you must commit the resulting changes to the .SimulinkProject folder to source control.
categoryName
The name of the new category.
To create a new category Owner in the currently open Simulink project, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Use the createCategory method. p.createCategory('Owner');
Simulink.ModelManagement.Project.CurrentProject
7-333

Simulink.ModelManagement.Project.CurrentProject.close
Purpose |
Close the currently open Simulink project |
Syntax |
p = Simulink.ModelManagement.Project.CurrentProject() |
|
p.close |
Description |
p = Simulink.ModelManagement.Project.CurrentProject() creates |
|
an instance of the CurrentProject class. |
|
p.close closes the currently open Simulink project. |
Example |
To close a currently open Simulink project, use the following commands. |
|
1 Create an instance of the CurrentProject class. |
|
p = Simulink.ModelManagement.Project.CurrentProject(); |
|
2 Use the close method. |
|
p.close; |
See Also |
Simulink.ModelManagement.Project.CurrentProject |
7-334
Simulink.ModelManagement.Project.CurrentProject.attach
Purpose |
Add a label to a file in the currently open Simulink project |
Syntax p = Simulink.ModelManagement.Project.CurrentProject()
p.attachLabelToFile(filePath,labelObj)
Description p = Simulink.ModelManagement.Project.CurrentProject() creates an instance of the CurrentProject class.
Input
Argument
Example
p.attachLabelToFile(filePath,labelObj) adds a label to a file specified using filePath using the label object labelObj .
filePath
The fully qualified path to the file to which the label is to be attached.
labelObj
The label object used to attach the label to the file.
To attach a label to a file in the currently open Simulink project with a review status Approved, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Create a fully qualified path for the file.
Note The use of the getRootDirectory method in this step is optional.
file = fullfile(p.getRootDirectory, 'work', 'myExample.c');
3Create a label object.
labelObj = Simulink.ModelManagement.Project.Label('Review','Approve
7-335

Simulink.ModelManagement.Project.CurrentProject.attachLabe
4Use the attachLabelToFile method. p.attachLabelToFile(file,labelObj);
See Also Simulink.ModelManagement.Project.CurrentProject
7-336

Simulink.ModelManagement.Project.CurrentProject.addFil
Purpose |
Add a file to the currently open Simulink project |
Syntax p = Simulink.ModelManagement.Project.CurrentProject()
p.addFileToProject(filePath)
Description p = Simulink.ModelManagement.Project.CurrentProject() creates an instance of the CurrentProject class.
Input
Argument
Example
See Also
p.addFileToProject(filePath) adds a file on the specified filePath to the currently open Simulink project.
filePath
The fully qualified path to the file within the root folder of the project.
To add a file to the currently open Simulink project, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Create a fully qualified path for the file.
Note The use of the getRootDirectory method in this step is optional.
file = fullfile(p.getRootDirectory, 'work', 'newshortcut.m');
3Use the addFileToProject method. p.addFileToProject(file);
Simulink.ModelManagement.Project.CurrentProject
7-337

Simulink.ModelManagement.Project.CurrentProject.removeCat
Purpose |
Remove a category from the currently open Simulink project |
Syntax p = Simulink.ModelManagement.Project.CurrentProject()
p.removeCategory(categoryName)
Description p = Simulink.ModelManagement.Project.CurrentProject() creates an instance of the CurrentProject class.
p.removeCategory(categoryName) removes the category.
Input
Argument
Examples
See Also
categoryName
The name of the category that is to be removed.
To remove a category Owner from the currently open Simulink project, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Remove the category. p.removecategory('Owner');
Simulink.ModelManagement.Project.CurrentProject
7-338

Simulink.ModelManagement.Project.CurrentProject.remov
Purpose |
Remove a file from the currently open Simulink project |
Syntax p = Simulink.ModelManagement.Project.CurrentProject()
p.removeFileFromProject(filePath)
Description p = Simulink.ModelManagement.Project.CurrentProject() creates an instance of the CurrentProject class.
Input
Argument
Example
See Also
p.removeFileFromProject(filePath) removes a file on the specified filePath from the currently open Simulink project.
filePath
The fully qualified path to the file within the root folder of the project.
To remove a file from the currently open Simulink project, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Create a fully qualified path for the file.
Note The use of the getDirectory method in this step is optional.
file = fullfile(p.getRootDirectory, 'work', 'newshortcut.m');
3Use the removeFileFromProject method. p.removeFileFromProject(file);
Simulink.ModelManagement.Project.CurrentProject
7-339

Simulink.ModelManagement.Project.CurrentProject.removeLab
Purpose |
Remove a label from a category in the currently open Simulink project |
Syntax |
p = Simulink.ModelManagement.Project.CurrentProject() |
|
labelObj = |
|
Simulink.ModelManagement.Project.Label(categoryName |
|
,labelName); |
|
p.removeLabel(labelObj) |
Description |
p = Simulink.ModelManagement.Project.CurrentProject() creates |
|
an instance of the CurrentProject class. |
|
labelObj = |
|
Simulink.ModelManagement.Project.Label(categoryName,labelName); |
|
creates a label object named labelObj in category categoryName. |
|
p.removeLabel(labelObj) removes the label from the category. |
Input |
categoryName |
Argument |
The name of the category from which the label is to be removed. |
|
|
|
labelName |
|
The name of the label. |
Examples |
To remove a label John from category Owner in the currently open |
|
Simulink project, use the following commands. |
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Create a label object.
labelObj= Simulink.ModelManagement.Project.Label('Owner','John');
3Remove the label from the category. p.removeLabel(labelObj);
7-340

Simulink.ModelManagement.Project.CurrentProject.remov
See Also Simulink.ModelManagement.Project.CurrentProject
7-341

Simulink.ModelManagement.Project.CurrentProject.setProjectN
Purpose |
Change the name of the currently open Simulink project |
Syntax p = Simulink.ModelManagement.Project.CurrentProject()
p.setProjectName(newName)
Description p = Simulink.ModelManagement.Project.CurrentProject() creates an instance of the CurrentProject class.
Input
Argument
Example
See Also
p.setProjectName(newName) changes the name of the currently open Simulink project to the specified newName.
The name change occurs immediately within your current project. If you are using a version control tool for your project, you must commit the changes to the .SimulinkProject folder to source control.
newName
The new specified name for an open Simulink project that replaces the existing name.
To rename the currently open Simulink project to myProject, use the following commands.
1Create an instance of the CurrentProject class.
p = Simulink.ModelManagement.Project.CurrentProject();
2Use the setProjectName method. p.setProjectName('myProject');
Simulink.ModelManagement.Project.CurrentProject
7-342

Simulink.ModelManagement.Project.CurrentProject.expor
Purpose |
Export Simulink project to Zip file |
Syntax |
p = Simulink.ModelManagement.Project.CurrentProject() |
|
export(p, filename.zip) |
|
export(p, filename.zip, definitionType) |
Description |
p = Simulink.ModelManagement.Project.CurrentProject() creates |
|
an instance of the CurrentProject class. |
|
export(p, filename.zip) exports the project p to the Zip file specified |
|
in filename. filename can be a file name, in which case Simulink |
|
exports the file to the current folder, or a fully qualified path name. |
|
export(p, filename.zip, definitionType) exports the project |
|
using the specified definitionType for the project definition files. If |
|
you do not specify definitionType, the project’s current setting |
|
is used. Use the definitionType export option if you want |
|
to change project definition file management from the type |
|
selected when the project was created. definitionType can be |
|
Simulink.ModelManagement.Project.DefinitionFiles.SingleFile |
|
or |
|
Simulink.ModelManagement.Project.DefinitionFiles.MultiFile. |
|
MultiFile is better for avoiding merging issues on shared projects. |
|
SingleFile is faster but is likely to cause merge issues when two users |
|
both submit changes in the same project to a source control tool. |
Example |
To export the currently open Simulink project to a Zip file, use the |
|
following commands. |
|
1 Create an instance of the CurrentProject class. |
|
p = Simulink.ModelManagement.Project.CurrentProject(); |
|
2 Use the export method. |
|
export(p, 'myfilename.zip') |
See Also |
Simulink.ModelManagement.Project.CurrentProject |
7-343

Simulink.Mask
Purpose |
Control masks programmatically |
Description Use an instance of Simulink.Mask class to perform the following operations.
•Create, copy, and delete masks
•Create, edit, and delete mask parameters
•Determine the block that owns the mask
•Get workspace variables defined for a mask
Methods |
addParameter |
Add a parameter to a mask |
|
copy |
Copy a mask from one block to |
|
|
another |
|
create |
Create a mask on a Simulink |
|
|
block |
|
delete |
Unmask a block and delete the |
|
|
mask from memory |
|
get |
Get a block mask as a mask object |
|
getOwner |
Determine the block that owns a |
|
|
mask |
|
getParameter |
Get a mask parameter using its |
|
|
name |
|
getWorkspaceVariables |
Get all the variables defined in |
|
|
the mask workspace for a masked |
|
|
block |
|
numParameters |
Determine the number of |
|
|
parameters in a mask |
7-344
Simulink.Mask
|
removeAllParameters |
Remove all existing parameters |
|
|
from a mask |
|
set |
Set the properties of an existing |
|
|
mask |
How To |
• “Control Masks Programmatically” |
|
7-345

Simulink.Mask.addParameter
Purpose |
Add a parameter to a mask |
Syntax |
p = Simulink.Mask.get(blockName) |
|
p.addParameter(Name,Value) |
Description |
p = Simulink.Mask.get(blockName) gets the mask on the block |
|
specified by blockName as a mask object. |
|
p.addParameter(Name,Value) appends a parameter to the mask. If |
|
you do not specify name–value pairs as arguments with this command, |
|
Simulink creates an unnamed mask parameter with control type set |
|
to edit. |
Input |
blockName |
Arguments |
The handle to the block or the path to the block inside the model. |
|
|
|
Name-Value Pair Arguments |
|
Specify optional comma-separated pairs of Name,Value arguments, |
|
where Name is the argument name and Value is the corresponding |
|
value. Name must appear inside single quotes (' '). You can |
|
specify several name and value pair arguments in any order as |
|
Name1,Value1,...,NameN,ValueN. |
|
Type |
|
Type of control that is used to specify the value of this parameter. |
|
Default: edit |
|
TypeOptions |
|
The options that are displayed within a popup control or in a |
|
promoted parameter. This field is a cell array. |
|
Default: empty |
|
Name |
7-346

Simulink.Mask.addParameter
The name of the mask parameter. This name is assigned to the mask workspace variable created for this parameter.
Default: empty
Prompt
Text that identifies the parameter on the Mask Parameters dialog box.
Default: empty
Value
The default value of the mask parameter in the Mask Parameters dialog box.
Default: Type specific; depends on the Type of the parameter
Evaluate
Option to specify whether parameter must be evaluated.
Default: 'on'
Tunable
Option to specify whether parameter is tunable.
Default: 'on'
Enabled
Option to specify whether user can set parameter value.
Default: 'on'
Visible
7-347

Simulink.Mask.addParameter
Examples
See Also
Option to set whether mask parameter is hidden or visible to the user.
Default: 'on'
Callback
Container for MATLAB code that executes when user makes a change in the Mask Parameters dialog box and clicks Apply.
Default: empty
TabName
The name of the tab in the Mask Parameters dialog box where the parameter appears.
Default: empty
1Get mask as an object using a masked block’s path. p = Simulink.Mask.get('myModel/Subsystem');
2Add a parameter to the mask without specifying name–value pairs for parameter attributes.
p.addParameter;
3Add a mask parameter of type popup that cannot be evaluated and appears on a tab named Properties in the Mask Parameters dialog box.
p.addParameter('Type','popup','TypeOptions',{'Red' 'Blue' 'Green'},'Ev
Simulink.Mask
7-348

Simulink.Mask.copy
Purpose |
Copy a mask from one block to another |
|
Syntax |
pSource = Simulink.Mask.get(srcBlockName) |
|
|
pDest = Simulink.Mask.create(destBlockName) |
|
|
pDest.copy(pSource) |
|
Description |
pSource = Simulink.Mask.get(srcBlockName) gets the mask on the |
|
|
source block specified by blockName as a mask object. |
|
|
pDest = Simulink.Mask.create(destBlockName) creates an empty |
|
|
mask on the destination block specified by destBlockName. |
|
|
pDest.copy(pSource) overwrites the destination mask with the source |
|
|
mask. |
|
Input |
srcBlockName |
|
Arguments |
|
The handle to the source block or the path to the source block |
|
|
inside the model. |
|
|
|
|
|
Note The source block should be masked. |
|
|
|
|
destBlockName |
|
|
|
The handle to the destination block or the path to the destination |
|
|
block inside the model. |
|
|
|
|
|
Note The destination block should have an empty mask. |
|
|
Otherwise, the copied mask will overwrite the non-empty mask. |
Examples |
|
|
1 Create an empty mask on the destination block using the block’s path. |
||
|
pDest = Simulink.Mask.create('myModel/Subsystem'); |
|
|
2 Get source mask as an object using the source block’s path. |
|
7-349

Simulink.Mask.copy
pSource = Simulink.Mask.get('myModel/Abs');
3Make the destination mask a copy of the source mask. pDest.copy(pSource);
See Also |
Simulink.Mask |
7-350

Simulink.Mask.create
Purpose |
Create a mask on a Simulink block |
Syntax p = Simulink.Mask.create(blockName)
Description p = Simulink.Mask.create(blockName) creates an empty mask on the block specified by blockName. If the specified block is already masked, an error message appears.
Input
Arguments
Examples
See Also
blockName
The handle to the block or the path to the block inside the model.
1Create a mask using a block’s handle.
Note In the model, select the mask to block.
p = Simulink.Mask.create(gcbh);
2Create a mask using the block’s path.
p = Simulink.Mask.create('myModel/Subsystem');
Simulink.Mask
7-351

Simulink.Mask.delete
Purpose |
Unmask a block and delete the mask from memory |
Syntax p = Simulink.Mask.get(blockName)
p.delete
Description p = Simulink.Mask.get(blockName) gets the mask on the block specified by blockName as a mask object.
p.delete unmasks the block and deletes the mask from memory.
Input
Arguments
Examples
See Also
blockName
The handle to the block or the path to the block inside the model.
1Get mask as an object using a masked block’s path. p = Simulink.Mask.get('myModel/Subsystem');
2Unmask the block using the mask object and delete the mask from memory.
p.delete;
Simulink.Mask
7-352

Simulink.Mask.get
Purpose |
Get a block mask as a mask object |
Syntax p = Simulink.Mask.get(blockName)
Description p = Simulink.Mask.get(blockName) gets the mask on the block specified by blockName as a mask object. If the specified block is not masked, a null value returns.
Input
Arguments
Examples
See Also
blockName
The handle to the block or the path to the block inside the model.
1Get mask as an object using a masked block’s handle.
Note In the model, select the masked block.
p = Simulink.Mask.get(gcbh);
2Get mask as an object using a masked block’s path. p = Simulink.Mask.get('myModel/Subsystem');
Simulink.Mask
7-353

Simulink.Mask.getOwner
Purpose |
Determine the block that owns a mask |
Syntax p = Simulink.Mask.get(blockName)
p.getOwner
Description p = Simulink.Mask.get(blockName) gets the mask on the block specified by blockName as a mask object.
p.getOwner returns the interface to the block that owns the mask.
Input
Arguments
Examples
See Also
blockName
The handle to the block or the path to the block inside the model.
1Get mask as an object using a masked block’s path. p = Simulink.Mask.get('myModel/Subsystem');
2Get the interface to the block that owns the mask. p.getOwner;
Simulink.Mask
7-354
Simulink.Mask.getParameter
Purpose |
Get a mask parameter using its name |
Syntax p = Simulink.Mask.get(blockName)
param = p.getParameter(paramName)
Description p = Simulink.Mask.get(blockName) gets the mask on the block specified by blockName as a mask object.
param = p.getParameter(paramName) returns the number of parameters in the mask.
Input
Arguments
Examples
See Also
blockName
The handle to the block or the path to the block inside the model.
paramName
The name of the parameter you want to get.
1Get mask as an object using a masked block’s path. p = Simulink.Mask.get('myModel/Subsystem');
2Get a mask parameter by using its name. param = p.getParameter('intercept');
Simulink.Mask
7-355

Simulink.Mask.getWorkspaceVariables
Purpose |
Get all the variables defined in the mask workspace for a masked block |
Syntax |
p = Simulink.Mask.get(blockName) |
|
vars = p.getWorkspaceVariables |
Description |
p = Simulink.Mask.get(blockName) gets the mask on the block |
|
specified by blockName as a mask object. |
|
vars = p.getWorkspaceVariables returns as a structure all the |
|
variables defined in the mask workspace for the masked block. |
Input |
blockName |
Arguments |
The handle to the block or the path to the block inside the model. |
|
|
Examples |
1 Get mask as an object using a masked block’s path. |
|
p = Simulink.Mask.get('myModel/Subsystem'); |
2Get all the variables defined in the mask workspace for the masked block.
vars = p.getWorkspaceVariables;
See Also |
Simulink.Mask |
7-356

Simulink.Mask.numParameters
Purpose |
Determine the number of parameters in a mask |
Syntax p = Simulink.Mask.get(blockName)
p.numParameters
Description p = Simulink.Mask.get(blockName) gets the mask on the block specified by blockName as a mask object.
p.numParameters returns the number of parameters in the mask.
Input
Arguments
Examples
See Also
blockName
The handle to the block or the path to the block inside the model.
1Get mask as an object using a masked block’s path. p = Simulink.Mask.get('myModel/Subsystem');
2Get the number of parameters in the mask. p.numParameters;
Simulink.Mask
7-357

Simulink.Mask.removeAllParameters
Purpose |
Remove all existing parameters from a mask |
Syntax p = Simulink.Mask.get(blockName)
p.removeAllParameters
Description p = Simulink.Mask.get(blockName) gets the mask on the block specified by blockName as a mask object.
p.removeAllParameters deletes all existing parameters from the mask.
Input
Arguments
Examples
See Also
blockName
The handle to the block or the path to the block inside the model.
1Get mask as an object using a masked block’s path. p = Simulink.Mask.get('myModel/Subsystem');
2Delete all existing parameters from the mask. p.removeAllParameters;
Simulink.Mask
7-358

Simulink.Mask.set
Purpose |
Set the properties of an existing mask |
Syntax |
p = Simulink.Mask.get(blockName) |
|
p.set(Name,Value) |
Description |
p = Simulink.Mask.get(blockName) gets the mask on the block |
|
specified by blockName as a mask object. |
|
p.set(Name,Value) sets mask properties that you specify using |
|
name–value pairs as arguments. |
Input |
blockName |
Arguments |
The handle to the block or the path to the block inside the model. |
|
|
|
Name-Value Pair Arguments |
|
Specify optional comma-separated pairs of Name,Value arguments, |
|
where Name is the argument name and Value is the corresponding |
|
value. Name must appear inside single quotes (' '). You can |
|
specify several name and value pair arguments in any order as |
|
Name1,Value1,...,NameN,ValueN. |
|
Type |
|
Text used as title for mask documentation that user sees on |
|
clicking Help in the Mask Parameters dialog box. |
|
Default: empty |
|
Description |
|
Text used as summary for mask documentation that user sees on |
|
clicking Help in the Mask Parameters dialog box. |
|
Default: empty |
|
Help |
7-359

Simulink.Mask.set
Text used as body text for mask documentation that user sees on clicking Help in the Mask Parameters dialog box.
Default: empty
Initialization
MATLAB code that initializes the mask.
Default: empty
SelfModifiable
Option to set whether the mask can modify itself during simulation.
Default: 'off'
Display
MATLAB code that draws the mask icon.
Default: empty
IconFrame
Option to specify whether the mask icon appears inside a visible block frame.
Default: 'on'
IconOpaque
Option to set the mask icon as opaque or transparent.
Default: 'on'
RunInitForIconRedraw
7-360

Simulink.Mask.set
Examples
See Also
Option to specify whether Simulink should run mask initialization before executing the mask icon commands.
Default: 'off'
IconRotate
Option to specify icon rotation.
Default: 'none'
PortRotate
Option to specify port rotation.
Default: 'default'
IconUnits
Option to specify whether mask icon is autoscaled, normalized, or scaled in pixels.
Default: 'autoscale'
1Get mask as an object using a masked block’s path. p = Simulink.Mask.get('myModel/Subsystem');
2Modify the mask so that its mask icon is transparent and its documentation summarizes what it does.
p.set('IconOpaque','off','Type','Random number generator','Descript
Simulink.Mask
7-361

Simulink.MaskParameter
Purpose
Description
Methods
How To
Manipulate mask parameters programmatically
Use an instance of Simulink.MaskParameter to set the properties of mask parameters.
set |
Set properties of mask |
|
parameters |
• “Control Masks Programmatically”
7-362

Simulink.MaskParameter.set
Purpose |
Set properties of mask parameters |
Syntax |
Simulink.MaskParameter.set(Name,Value) |
Description |
Simulink.MaskParameter.set(Name,Value) sets the properties of |
|
a mask parameter. |
Input |
Name-Value Pair Arguments |
Arguments |
Specify optional comma-separated pairs of Name,Value arguments, |
|
where Name is the argument name and Value is the corresponding |
|
value. Name must appear inside single quotes (' '). You can |
|
specify several name and value pair arguments in any order as |
|
Name1,Value1,...,NameN,ValueN. |
|
Type |
|
Type of control that is used to specify the value of this parameter. |
|
Default: edit |
|
TypeOptions |
|
The options that are displayed within a popup control or in a |
|
promoted parameter. This field is a cell array. |
|
Default: empty |
|
Name |
|
The name of the mask parameter. This name is assigned to the |
|
mask workspace variable created for this parameter. |
|
Default: empty |
|
Prompt |
|
Text that identifies the parameter on the Mask Parameters dialog. |
7-363

Simulink.MaskParameter.set
Default: empty
Value
The default value of the mask parameter in the Mask Parameters dialog.
Default: Type specific; depends on the Type of the parameter
Evaluate
Option to specify whether parameter must be evaluated.
Default: 'on'
Tunable
Option to specify whether parameter is tunable.
Default: 'on'
Enabled
Option to specify whether user can set parameter value.
Default: 'on'
Visible
Option to set whether mask parameter is hidden or visible to the user.
Default: 'on'
Callback
Container for MATLAB code that executes when user makes a change in the Mask Parameters dialog and clicks Apply.
Default: empty
7-364
Simulink.MaskParameter.set
Examples
See Also
TabName
The name of the tab in the Mask Parameters dialog where the parameter appears.
Default: empty
1Get mask as an object using a masked block’s path. p = Simulink.Mask.get('myModel/Subsystem');
2Get a mask parameter. a = p.Parameters(1);
3Edit mask parameter so it is of type popup, cannot be evaluated, and appears on a tab named Properties in the Mask Parameters dialog.
a.set('Type','popup','TypeOptions',{'Red' 'Blue' 'Green'},'Evaluate
Simulink.Mask | Simulink.MaskParameter
7-365

Simulink.MaskParameter.set
7-366

8
Model and Block
Parameters
•“Model Parameters” on page 8-2
•“Common Block Parameters” on page 8-96
•“Block-Specific Parameters” on page 8-109
•“Mask Parameters” on page 8-259