

Метод Нелдера-Мида (метод деформируемого многогранника)
Чтобы можно было оценить метод Нелдера -Мида, кратко рассмотрим поиск по регулярному многограннику, предложенный Спендли, Хекстом и Химсвортом.
Регулярным многогранником (симплексом) в n-мерном пространстве называется множество из (n+1)-ой равноудалённой точки. На плоскости симплексом является равносторонний треугольник, в пространстве - правильный тетраэдр.
Из
аналитической геометрии известно, что
координаты вершин регулярного симплекса
определяются следующей матрицей D
размерности
![]() :
:
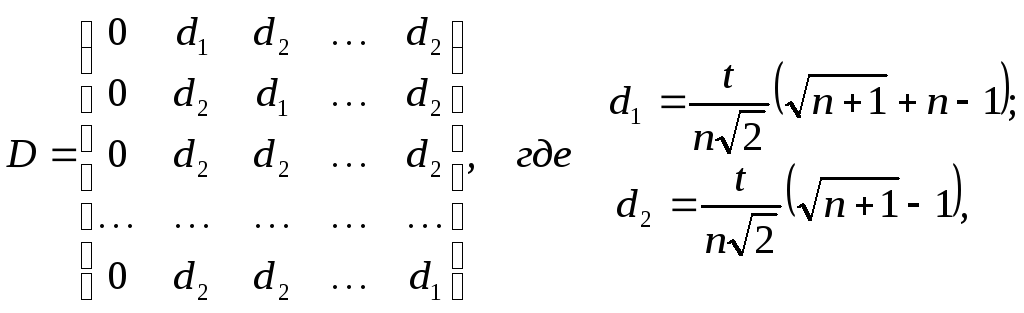
где t - расстояние между двумя вершинами. Столбцы этой матрицы являются координатами вершин симплекса.
При оптимизации этим методом целевая функция вычисляется в каждой вершине регулярного симплекса. Из вершины, где целевая функция максимальна, проводится проектирующая прямая через центр тяжести симплекса, затем вершина с максимальным значением функции отбрасывается и строится новый (отражённый) симплекс из оставшихся прежних точек и одной новой точки, расположенной на проектирующей прямой на надлежащем расстоянии от центра тяжести. Продолжение этой процедуры, в которой каждый раз отбрасывается точка с максимальным значением целевой функции, а также использование правил уменьшения размера симплекса и предотвращения циклического движения в окрестности экстремума позволяют осуществить поиск, в котором величина шага на любом этапе фиксирована, а направление поиска можно менять (производные не используются).
Последовательные симплексы, построенные в двумерном пространстве для минимизации «хорошей» целевой функцией, приведены на рис. 8.
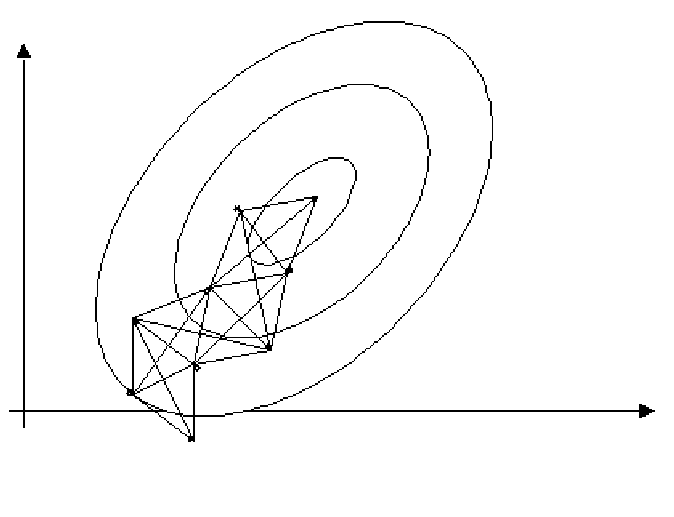
Рис. 8
Определённые трудности, встречающиеся при использовании этого метода, а именно отсутствие ускорения поиска в «хорошем направлении» и трудности при поиске на искривлённых «оврагах» и «хребтах» привели к необходимости модификаций алгоритма.
Нелдер и Мид (1964) предложили модификацию, в которой симплекс может изменять свою форму. Так как в этом случае симплекс уже не будет регулярным, метод назвали поиском по деформируемому многограннику.
Обсудим этот метод. Минимизируется функция n независимых переменных с использованием (n+1) вершин многогранника. Вершина, в которой значение функции наибольшее, проектируется через центр тяжести оставшихся вершин. Улучшенные значения целевой функции находятся последовательной заменой точки с наибольшим значением на более «хорошие» точки, пока не будет найден минимум. При этом многогранник может вытягиваться или сжиматься по выбранному направлению.
Пусть
![]() являются i-ой
вершиной на некотором k-ом
этапе поиска. Пусть также
являются i-ой
вершиной на некотором k-ом
этапе поиска. Пусть также
![]()
![]() ,
,
т.е.
в точке
![]() функция принимает наибольшее значение,
а в точке
функция принимает наибольшее значение,
а в точке![]() - наименьшее значение среди точек
многогранника.
- наименьшее значение среди точек
многогранника.
Так
как многогранник состоит из
![]() точек, то центр тяжести всех вершин,
кроме
точек, то центр тяжести всех вершин,
кроме![]() ,
обозначим через
,
обозначим через![]() .
Координаты
.
Координаты![]() определяются по формуле
определяются по формуле
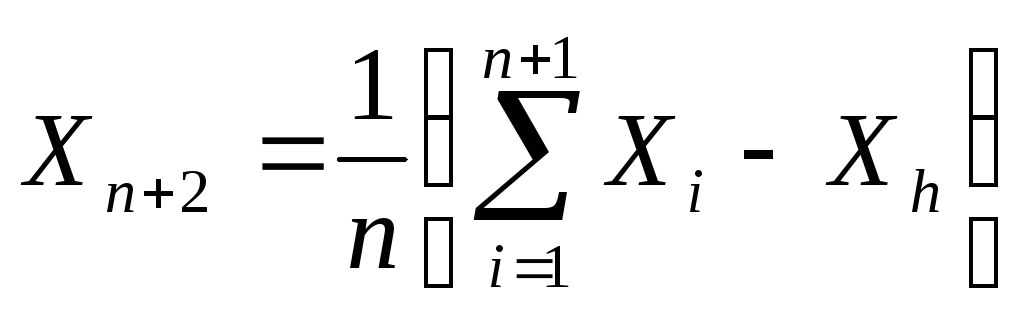 .
.
Начальный многогранник обычно выбирается в виде регулярного симплекса (но это не обязательно) с точкой 1 в качестве начала координат. Начало координат может быть также помещено в центре тяжести многогранника.
Алгоритм деформируемого многогранника состоит из операций отражения, растяжения, сжатия и редукции.
Отражение.
Вершина
![]() проектируется через центр тяжести
оставшихся вершин в соответствии с
соотношением
проектируется через центр тяжести
оставшихся вершин в соответствии с
соотношением
![]() ,
,
где α > 0 является коэффициентом отражения (рис.9). Первой всегда выполняется операция отражения.
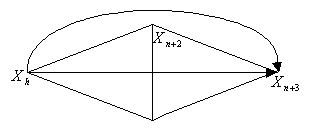
Рис. 9
Растяжение.
Если
![]() ,
то вектор
,
то вектор![]() растягивается в соответствии с
соотношением
растягивается в соответствии с
соотношением
![]() ,
,
где γ>1 - коэффициент растяжения (рис 10).
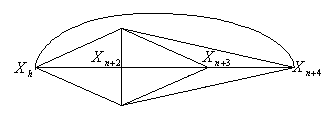
Рис. 10
Если
![]() ,
то
,
то![]() заменяется на
заменяется на![]() и процедура продолжается снова с
операции отражения.
и процедура продолжается снова с
операции отражения.
В
противном случае
![]() заменяется на
заменяется на![]() и также осуществляется переход к
операции отражения.
и также осуществляется переход к
операции отражения.
Сжатие.
Если
![]() для всех
для всех![]() ,
то вектор
,
то вектор![]() сжимается в соответствии с формулой
сжимается в соответствии с формулой
![]() ,
,
где 0 < β < 1 – коэффициент сжатия (рис. 11).
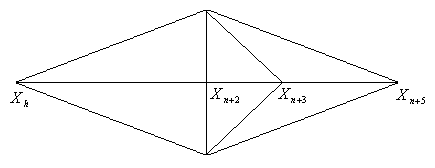
Рис. 11
Затем
![]() заменяется на
заменяется на![]() и осуществляется переход к операции
отражения для продолжения поиска.
и осуществляется переход к операции
отражения для продолжения поиска.
Редукция.
Если
![]() ,
то все векторы
,
то все векторы![]()
![]() уменьшаются в 2 раза с отсчетом от
уменьшаются в 2 раза с отсчетом от![]() в соответствии с формулой
в соответствии с формулой
![]() .
.
Затем алгоритм возвращается к операции отражения для продолжения поиска на следующем шаге.
Если ни одна из операций (растяжение, сжатие, редукция) не выполняется, происходит операция отражения.
Критерий окончания поиска, предложенный Нелдером и Мидом записывается в виде формулы
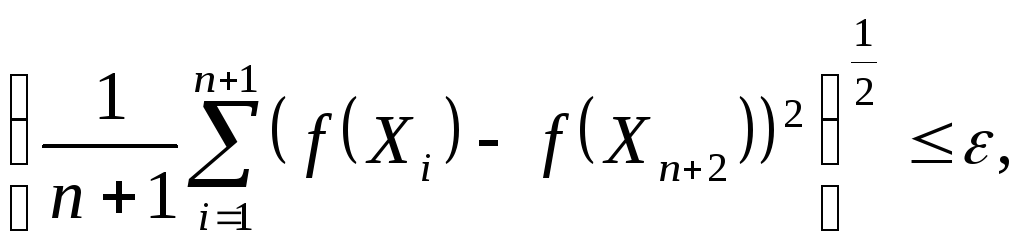
где
ε
- произвольное малое число,
![]() - центр тяжести многогранника на данном
шаге.
- центр тяжести многогранника на данном
шаге.
Деформируемый многогранник в противоположность жёсткому симплексу адаптируется к топографии целевой функции, вытягиваясь вдоль длинных наклонных плоскостей, изменяя направление в изогнутых впадинах и сжимаясь в окрестности минимума, что достигается выбором коэффициентов сжатия, растяжения и отражения.
Как следует выбирать α, β и γ ?
После того как деформируемый многогранник подходящим образом промасштабирован, его размеры должны поддерживаться неизменными, пока изменения в топологии задачи не потребуют применения многогранника другой формы. Это можно реализовать только при α =1. Было показано, что при α < 1 требуется большее количество вычислений целевой функции. Если α >>1, то это затрудняет адаптацию многогранника при изменениях направления поиска и замедляет сходимость в окрестности минимума. Таким образом, α =1 выбирается как компромисс. Чтобы выяснить, какое влияние на поиск имеет выбор β и γ, были проведены решения тестовых задач. Оказалось, что влияние β на эффективность поиска, более заметно, чем влияние γ.
Для практических нужд Нелдером и Мидом были рекомендованы следующие значения коэффициентов: α = 1, β = 0,5, γ = 2.