

Контрольные вопросы и задания
1. Какое решение задачи ЛП называется базисным?
2. Как выбрать переменную в симплекс-методе для включения в базис?
3. Как выбрать переменную в симплекс-методе для исключения из базиса?
4. Дайте определение дополнительных переменных и для чего они служат?
5. Что называется искусственными переменными и для чего они используются?
6. Как при помощи симплекс-метода определить, что задача ЛП имеет неограниченное решение?
7. Как при помощи симплекс-метода определить, что задача ЛП имеет бесконечное множество решений?
8. Какая транспортная задача является задачей закрытого типа?
9. Что называется фиктивным поставщиком и фиктивным потребителем?
10. Постройте математическую модель и решите графически следующую задачу:
в ОТК некоторой фирмы работают контролеры разрядов 1 и 2. Норма выработки ОТК за 8-часовой рабочий день составляет не менее 1800 изделий. Контролер разряда 1 проверяет 25 изделий в час, причем не ошибается в 98% случаев. Контролер разряда 2 проверяет 15 изделий в час; его точность составляет 95%. Заработная плата контролера разряда 1 равна 4 дол. в час, контролер разряда 2 получает 3 дол. в час. При каждой ошибке контролера фирма несет убыток в размере 2 дол. Фирма может использовать 8 контролеров разряда 1 и 10 контролеров разряда 2. Руководство фирмы хочет определить оптимальный состав ОТК, при котором общие затраты на контроль будут минимальными.
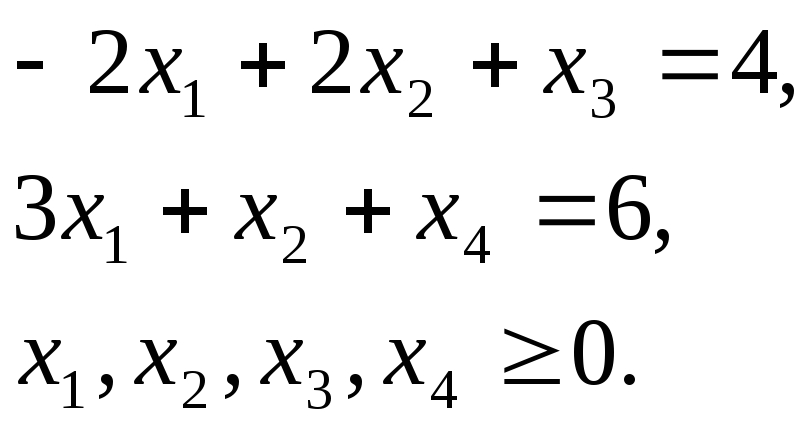
Решить симплекс-методом следующую задачу ЛП:
минимизировать
![]()
при ограничениях
Заключение
В данном учебном пособии была рассмотрена только часть алгоритмов решения оптимизационных задач, которые можно порекомендовать для первого знакомства с методами оптимизации. Методы расположены так, что сначала рассмотрены менее эффективные и реже используемые на практике, затем рассмотрены современные и часто применяемые методы. В некоторых главах приведены программы, выполненные в системе MATHCAD, которые позволяют анализировать изучаемые методы. В конце каждой главы даны контрольные вопросы и задания. С их помощью можно проверить хорошо ли усвоен учебный материал.
К сожалению, это только малая часть оптимизационных задач, которые встречаются в практической деятельности инженера. За рамками учебного пособия остались алгоритмы многих задач оптимизации, которые не входят в программу. Это алгоритмы векторной и дискретной оптимизации, алгоритмы многоэкстремальной оптимизации, генетические и эволюционные алгоритмы, и многие другие. Они все чаще применяются при решении инженерных задач.
Однако рамки этого учебного процесса ограничены полугодовым курсом лекций по методам оптимизации. Возможно в будущем будет расширена учебная программа и современным подходам будет уделено достойное внимание.
Если студент, изучив этот материал, обратится к дополнительной современной литературе, он сможет легко усвоить дополнительный материал самостоятельно.
Библиографический список
Акулич И.Л. Математическое программирование в примерах и задачах. – М.: Высш. шк., 1986.
Базара М. Нелинейное программирование. Теория и алгоритмы / Ш. Базара, К. Шетти. – М.: Мир, 1982.
Банди Б. Методы оптимизации. Вводный курс. – М.: Радио и связь, 1988.
Банди Б. Основы линейного программирования. – М.: Радио и связь, 1989.
Носач В.В. Решение задач аппроксимации с помощью персональных компьютеров. – М.: МИКАП, 1994.
Реклейтис Г. Оптимизация в технике. В 2-х кн. / Г. Реклей-
Тис, А. Рейвиндран, К. Рэгсдел. – М.: Мир, 1986.
Семенкин Е.С. Оптимизация технических систем: Учеб. пособие / Е.С. Семенкин, Щ.Э. Семенкина, С.Д. Коробейников. СИБУП.– Красноярск, 1996.
Химмельблау Д. Прикладное нелинейное программирование. – М.: Мир, 1975.
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ…………………………………..….………..……3