

3.1.2. Метод поиска Хука – Дживса
Процедура Хука и Дживса представляет собой комбинацию двух типов поиска: исследующий поиск и поиск по образцу. Исследующий поиск ориентирован на выявление характера локального поведения целевой функции и определение направлений вдоль “оврагов”.
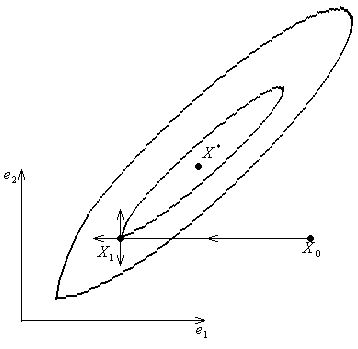
Рис. 6
Первые
![]() шаговисследующего
поиска
осуществляются аналогично первым
шаговисследующего
поиска
осуществляются аналогично первым
![]() шагам покоординатного спуска. Для
проведения исследующего поиска
необходимо задать величину шага, которая
может быть различной для разных
координатных направлений и изменяться
в процессе поиска. Исследующий поиск
начинается в некоторой исходной точке.
Если значение целевой функции в пробной
точке не превышает значения функции
в исходной точке, то шаг поиска
рассматривается как успешный. В противном
случае необходимо вернуться в предыдущую
точку и сделать шаг в противоположном
направлении с последующей проверкой
значения целевой функции. После перебора
всех
шагам покоординатного спуска. Для
проведения исследующего поиска
необходимо задать величину шага, которая
может быть различной для разных
координатных направлений и изменяться
в процессе поиска. Исследующий поиск
начинается в некоторой исходной точке.
Если значение целевой функции в пробной
точке не превышает значения функции
в исходной точке, то шаг поиска
рассматривается как успешный. В противном
случае необходимо вернуться в предыдущую
точку и сделать шаг в противоположном
направлении с последующей проверкой
значения целевой функции. После перебора
всех![]() координатных направлений исследующий
поиск завершается. Полученную в
результате точку называют базисной
точкой.
координатных направлений исследующий
поиск завершается. Полученную в
результате точку называют базисной
точкой.
Поиск по образцу заключается в реализации единственного шага из полученной базисной точки вдоль прямой, соединяющей эту точку с предыдущей базисной точкой. Новая точка образца определяется в соответствии с формулой
![]() .
.
Движение
по образцу считается успешным, если
исследующий поиск, проведенный из
точки
![]() ,
приводит к уменьшению целевой функции.
В этом случае полученная точка
рассматривается как новая базисная
точка
,
приводит к уменьшению целевой функции.
В этом случае полученная точка
рассматривается как новая базисная
точка![]() .
Если исследующий поиск, проведенный
после поиска по образцу, неудачен, то
необходимо вернуться в точку
.
Если исследующий поиск, проведенный
после поиска по образцу, неудачен, то
необходимо вернуться в точку![]() и провести исследующий поиск с целью
выявления нового направления минимизации.
В конечном счете возникает ситуация,
когда такой поиск не приводит к успеху.
В этом случае требуется уменьшить
величину шага при исследующем поиске
(например в 10 раз) и возобновить
исследующий поиск. Поиск завершается,
когда величина исследующего шага
становится достаточно малой.
и провести исследующий поиск с целью
выявления нового направления минимизации.
В конечном счете возникает ситуация,
когда такой поиск не приводит к успеху.
В этом случае требуется уменьшить
величину шага при исследующем поиске
(например в 10 раз) и возобновить
исследующий поиск. Поиск завершается,
когда величина исследующего шага
становится достаточно малой.
Метод Хука - Дживса характеризуется несложной стратегией поиска, относительной простотой вычислений и невысоким уровнем требований к объему памяти ЭВМ. Однако необходимо отметить, что в ряде случаев алгоритм может заканчивать работу преждевременно, а при наличии значительных нелинейных эффектов вырождается в последовательность исследующих поисков без перехода к ускоряющему поиску по образцу. В связи с чем разработан ряд методов, в которых устраняются эти недостатки.
Метод Розенброка (метод вращающихся координат)
Метод вращающихся координат избавлен от некоторых недостатков метода Хука и Дживса. Улучшение достигается построением новой системы ортогональных векторов, которая на каждой итерации выбирается с учетом структуры минимизируемой функции в окрестности полученной точки. Новая система координат направляет один из базисных векторов вдоль дна возможного оврага. Другие векторы новой системы - ортогональны. Схема построения новой системы координат проиллюстрирована на рис. 7.
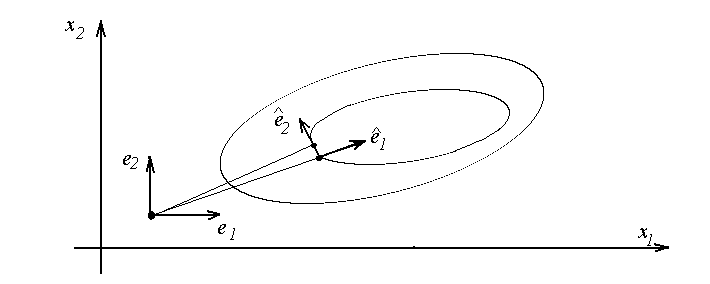
Рис. 7
Пусть
![]() - система единичных ортогональных
векторов. Тогда новая система векторов
- система единичных ортогональных
векторов. Тогда новая система векторов![]() строится с помощью процедуры Грама-Шмидта:
строится с помощью процедуры Грама-Шмидта:
А
![]()
где![]() - скалярное произведение
- скалярное произведение![]() ,
,![]() - норма вектораbj
,
λj
- длина шага вдоль направления ej.
Можно показать, что система векторов
- норма вектораbj
,
λj
- длина шага вдоль направления ej.
Можно показать, что система векторов
![]() является
ортогональной.
является
ортогональной.
Алгоритм.
Начальный
этап.
Пусть
e1
,
e2
,
…,en
- координатные направления,![]() -начальное
приближение, ε>0 - малое число,
-начальное
приближение, ε>0 - малое число,
![]() ,
,
n = j = 1.
Основной этап:
a)
найти оптимальное решение λj
задачи минимизации
функции f(![]() +λej)
и положить
+λej)
и положить
![]() =
=![]() +
λjej;
если j < k,
то j=j+1, и вернуться к a); в противном
случае необходимо перейти к пункту b);
+
λjej;
если j < k,
то j=j+1, и вернуться к a); в противном
случае необходимо перейти к пункту b);
b)
пусть
![]() =
=
![]() ;
если
;
если
![]() ,
то вычисления прекращаются; в противном
случае необходимо положить
,
то вычисления прекращаются; в противном
случае необходимо положить
![]() =
=
![]() ,
принятьn
= n
+ 1, j
=1 и перейти к пункту c);
,
принятьn
= n
+ 1, j
=1 и перейти к пункту c);
с)
строим новую систему ортогональных
векторов
![]() и выполняем переход к пунктуa);
при этом векторы ej
принимаются равными векторам
и выполняем переход к пунктуa);
при этом векторы ej
принимаются равными векторам
![]()
Пример. Щелкнув по значку, откроется Mathcad документ метода Розенброка, в котором можно выполнить вычисления.

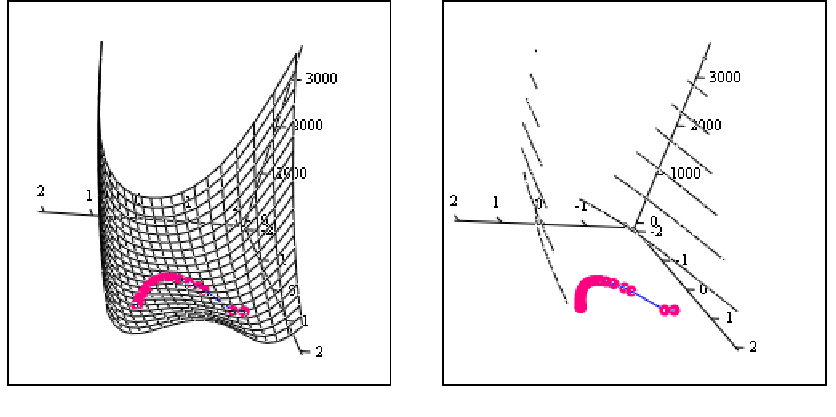
Минимизация
функции
![]()
методом Розенброка