

11. Закон сохранения энергии для системы невзаимодействующих частиц.
система, состоящая из невзаимодействующих элементарных частиц, обладающих каждая определённой скоростью и, следовательно, кинетической энергией Tкин. В этом случае полная энергия системы равна сумме энергий покоя всех частиц плюс сумма их кинетических энергий:
![]()
Вместо mc^2 надо: Ui
12. Взаимная потенциальная энергия частиц. Закон сохранения энергии системы частиц.
Потенциальная энергия тел, взаимодействующих посредством гравитационных сил.
![]() ,
где r- расстояние
между взаимодействующими телами.
,
где r- расстояние
между взаимодействующими телами.
Знак "-" говорит о том, что это энергия притягивающихся тел.
Потенциальная (электростатическая) энергия взаимодействия зарядов.
![]() -
может быть и
положительной и отрицательной.
-
может быть и
положительной и отрицательной.
собственная
потенциальная
энергия данной системы
![]() Преобразуем
эту сумму следующим образом. Представим
каждое слагаемое
Преобразуем
эту сумму следующим образом. Представим
каждое слагаемое![]() в
симметричном виде:
в
симметричном виде:![]() ,
ибо ясно, что
,
ибо ясно, что![]() .
Тогда
.
Тогда
![]()
Сгруппируем
члены с одинаковым первым индексом:![]()
Каждая
сумма в круглых скобках представляет
собой потенциальную энергию
![]() взаимодействия
взаимодействия![]() частицы
с остальными двумя. Поэтому последнее
выражение можно переписать так:
частицы
с остальными двумя. Поэтому последнее
выражение можно переписать так:![]()
закон сохранения механической энергии:
в
инерциальной системе отсчета механическая
энергия замкнутой системы частиц,
в которой нет непотенциальных сил,
сохраняется
в процессе
движения, т. е. ![]()
энергия никогда не создается и не уничтожается, она может только переходить из одной формы в другую или обмениваться между отдельными частями материи.
13. Энергия упругой деформации. Условия равновесия механической системы.
Энергию деформированного упругого тела также называют энергией положения или потенциальной энергией (ее называют чаще упругой энергией), так как она зависит от взаимного положения частей тела, например витков пружины. Работа, которую может совершить растянутая пружина при перемещении ее конца, зависит только от начального и конечного растяжений пружины.
Значит, среднее значение силы равно Fср=kl. Можно показать, что для вычисления работы А изменяющейся силы упругости нужно это среднее значение силы умножить на перемещение точки приложения силы: A=1/2 kl•l=1/2kl2.
Таким
образом, потенциальная энергия упругости
Еп
равна
![]()
Р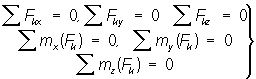 авновесие
механической системы,
состояние механической системы,
находящейся под действием сил, при
котором все её точки покоятся по отношению
к рассматриваемой системе отсчёта. Если
система отсчёта является инерциальной
(см. Инерциальная
система отсчёта),
равновесие
называется абсолютным, в противном
случае — относительным. Изучение условий
Равновесие
механической системы
— одна из основных задач статики.
Условия
Равновесие
механической системы
имеют вид равенств, связывающих
действующие силы и параметры, определяющие
положение системы; число этих условий
равно числу степеней свободы системы.
Условия относительности Равновесие
механической системы
составляются так же, как и условия
абсолютного равновесия, если к действующим
на точки силам прибавить соответствующие
переносные силы
инерции.
Условия равновесия свободного твёрдого
тела состоят в равенстве нулю сумм
проекций на три координатные оси Oxyz
и сумм моментов относительно этих осей
всех приложенных к телу сил, т. е.
авновесие
механической системы,
состояние механической системы,
находящейся под действием сил, при
котором все её точки покоятся по отношению
к рассматриваемой системе отсчёта. Если
система отсчёта является инерциальной
(см. Инерциальная
система отсчёта),
равновесие
называется абсолютным, в противном
случае — относительным. Изучение условий
Равновесие
механической системы
— одна из основных задач статики.
Условия
Равновесие
механической системы
имеют вид равенств, связывающих
действующие силы и параметры, определяющие
положение системы; число этих условий
равно числу степеней свободы системы.
Условия относительности Равновесие
механической системы
составляются так же, как и условия
абсолютного равновесия, если к действующим
на точки силам прибавить соответствующие
переносные силы
инерции.
Условия равновесия свободного твёрдого
тела состоят в равенстве нулю сумм
проекций на три координатные оси Oxyz
и сумм моментов относительно этих осей
всех приложенных к телу сил, т. е.