

§8. Момент силы и момент импульса относительно точки
и оси. Плечо силы
r
Пусть в точке «А» приложена сила F , радиус вектор точки «А»,
проведенный из точки «О», равен r (рис.8.1). Момент силы N относи-
тельно точки (в данном случае точки «О»), равен векторному произведению
радиус-вектора r этой точки на вектор силы F , действующей на эту точ-
ку:

=
r
×
F
N=rFsina , (8.1)
29
где
a
-
угол
между
векторами
r
и
F
.

(Точка,

вектор N - это точка, из которой прове-
дён радиус-вектор (на рис.8.1, 8.2 - точка
“O”)).
Проекция момента силы на не-
которую ось (Z) называется моментом
силы относительно этой оси.
Вектор F можно разложить на
две
составляющие
-
параллельную
к
оси

Z ( F|| ) и перпендикулярную к ней ( F^ ,
рис.
8.1):


F
=
F
+
F

Вектор F^ в свою очередь разложим на
r
составляющие параллельную и перпендикулярную к радиусу R ( FR ,
r
Fτ , рис. 8.1) , где R - длина перпендикуляра, проведённого от оси Z к
точке
(точка
А).
Следовательно:





r r r r r r
^ R || R
N =[rF]=[r(F|| + FR + Fτ)]=[rF||]+[rFR]+[rFτ]
Обозначим
N|| = [rF||] ; NR = [rFR] ; Nτ =[rFτ] (8.3)
r r r r
N
=
N
+
N
+
N


N N N
Из свойств векторного произведения (вектор N перпендику-
лярен каждому из сомножителей) следует, что N|| и NR перпендику-
лярны
к
оси
Z
(рис.
8.1a,б),
поэтому:


N N 0 (8.5)
30
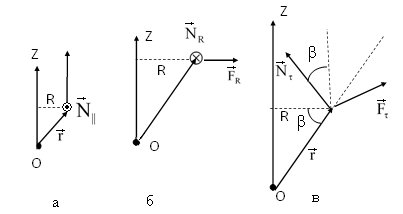

Рис.8.2
Найдём Nτ,Z (рис. 8.2 ,в). Из свойств векторного произведения и рисунка
r
видно, что угол между Nτ и осью Z (угол b) равен углу между вектором
r и радиусом R. (Углы, стороны которых взаимно перпендикулярны: R
перпендикулярно к Z, r к Nt ). Следовательно:
=
×
cos
β

Из определения векторного произведения:
,

где g- угол между r и Ft . Этот угол равен 90° (рис. 8.1 , 8.2,в).
Поэтому: (8.6)
t , Z
Из
рисунка
8.2
в
следует:

r cos β = R => Nt ,Z = FτR
Подставим это выражение в
ур-е (8.4) и учтем (8.5):
NZ=FtR (8.7)
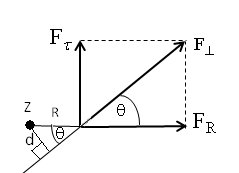
На рисунке 8.3 ось Z
перпендикулярна плоскости
рисунка, d-длинна перпенди-
куляра, опущенного из оси Z
на линию вдоль которой дей-
31
r
ствует сила F^ . Величина d называется плечом силы.
d = R sin θ ⇒ NZ = Ft R = Ft d/ sin θ (8.8)
Из рис. (8.3):
Fτ / sinθ = F^
Следовательно:

(8.9)

Моментом импульса L относительно точки называется величина, равная:
L = [rp] (8.10)
r
Момент импульса , относительно оси Z равен проекции вектора L на эту
ось. Повторяя все вышеизложенное (заменив вектор F на вектор P ),
получим:
(8.11)

Смысл обозначений в (8.11) аналогичен тем, что были приняты для мо-
мента силы.
§9. Момент импульса и момент инерции тела
относительно оси. Уравнение моментов. Закон дина-
мики вращательного движения твердого тела
относительно неподвижной оси. Теорема Штейнера
Рассмотрим вращательное движение частицы (материальной точки)
вокруг оси Z (рис. 9.1,ось Z перпендикулярна плоскости рисунка). В
дальнейшем будем рассматривать вращение относительно оси, направ-
ление которой в пространстве не меняется.
Скорость
частицы
u
перпендику-
лярна радиусу вращения R . Следователь-
но, согласно обозначениям §8
ut=u
Из (8.11) получим:
LZ=PtR=mut=mRu.
Так как u=wR, то
Lz
=
mR2ω


Рис.9.1
32
Iz
=
mR2

называется моментом инерции материальной точки относительно оси
вращения. Из (9.1) и (9.2) следует:
Lz
=
Izw

В общем случае частица имеет ускорение at , создаваемое силой Ft
(рис.9.1). Запишем второй закон Ньютона:
Fτ = maτ
Для неменяющегося в пространстве направления оси вращения (т.е. для
рассматриваемого случая )
at =bR ⇒Ft=mRb (9.4)
Помножим (9.4) на R:
FtR=mR2b
Учитывая (8.7) и (9.2), получим
NZ=IZb (9.5)
Уравнение (9.5) обычно называют законом динамики вращательного дви-
жения
материальной
точки.
Так
как

β = ⇒
Nz = Iz = (Izω)
С учетом (9.3) из последнего соотношения находим:
Nz
=
(9.6)

Рассмотрим твердое тело как систему, состоящую из множества
частиц. Запишем уравнение (9.6) для каждой из них:
dLz,i , (9.7)
Nz,i =
dt
где
i
-
номер
частицы.
Сложим
эти
уравнения:



Nz,i = = Lz,i
Обозначим
(9.9)
где Nz момент силы относительно оси, действующий на тело, Lz мо-
мент импульса тела. Следует учесть, что при вычислении Nz моменты
33
внутренних сил сократятся. Поэтому Nz - суммарный
момент внешних сил относительно оси вращения. Таким образом
dLz
(9.10)
dt
Уравнение (9.10) обычно называют правилом моментов.
Из
(9.9)
и
(9.3)
получим:

Lz = Lz,i = Iz,iw , (9.11)
LZ,i=miRi2, (9.12)
Где mi, Ri - соответственно масс и радиус вращения i-ой точки.
Т.к. угловая скорость всех точек твердого тела одинаковая и равна угло-
вой скорости вращения твердого тела, индекс «i» у w в уравнении (9.11)
не пишется (угловое ускорение b для всех точек тоже одинаковое). Из
(9.11) и (9.12) следует
Lz = w × Ri 2 (9.13)
Величина
Iz
=
Iz,i
=


называется моментом инерции тела относительно оси вращения. Видно,
что IZ зависит от положения оси вращения относительно тела, т.к. от
этого зависит Ri. Следовательно, для различных осей IZ разное. Для
данной оси IZ абсолютно твердого тела не зависит от скорости враще-
ния т.к. взаимное расположение частиц такого тела не меняется и , сле-
довательно, Ri от скорости не зависит.
Подставим (914) в (9.13)
LZ=IZw (9.15)
Таким
образом,
момент
импульса
тела
равен



произведению момента инерции тела на угло-
вую скорость вращения.
Подставим (9.15) в (9.10):
d(Izω) dω
dt
dt
Т.к
=
β
⇒


NZ=IZb
(9.16)

т.е. момент силы действующей на тело, равен
произведению момента инерции тела на его угловое ускорение. Уравне-
34
ние (9.16) обычно называют законом динамики вращательного движе-
ния твердого тела относительно неподвижной оси.
Из изложенного следует, что момент инерции тела надо каждый
раз рассчитывать для той оси, относительно которой тело вращается.
Есть таблицы (в учебниках, пособиях и задачниках) в которых приводят-
ся формулы для расчета IZ некоторых тел относительно определенных
осей вращения (обычно для осей, проходящих через центр тяжести).
Пусть известен момент инерции Iz,0 относительно некоторой
оси , проходящий через центр тяжести “C” (ось Z0 на рисунке 9.2). Надо
найти Iz относительно другой оси Z , параллельной оси Z0. Согласно
теореме Штейнера, Iz равен:




IZ
=IZ,0+ma2
,
(9.17)


где
m
-
масса
тела
,
a
-
расстояние
между
ося-



ми.


Следует также учесть, что любое тело можно
представить как “сумму” нескольких тел
(например,
на
рис.9.3
-
как
два
тела).
Тогда:


m R2 = mi R2 + miRi2 ,
где первая сумма берется для части 1, вторая - части 2.
Из
определения
момента
инерции,
следует:


mi Ri ; Iz,2 = mi Ri ;
где IZ,1 и IZ,2 - моменты инерции 1-ой и 2-ой части. Поэтому
IZ= IZ,1+ IZ,2
Аналогичные рассуждения справедливы для “разбиения” абсо-
лютно твердого тела на любое число частей. Следовательно , для тел
сложной формы можно искать моменты инерции каждой из выделенных
“частей “ и затем их сложить .Такое свойство физических величин назы-
вается аддитивностью. Момент инерции тела относительно данной оси
является величиной аддитивной. (Напомним, что масса тела тоже величи-
на аддитивная. Например, для рис.9.3 масса тела m равна
m = m1 + m2).
35
Основные формулы поступательного и
вращательного движения.
Поступательное
движение
Вращательное
движение

величина,
закон
формула
величина,
закон
формула





изменение по-
ложения
точи

скорость
поступательно-
го
движения





u =


ускорение при
поступательном


движении
масса
сила


z

импульс

Второй закон
Ньютона


dP

dt
*
Работа


* Кинетическая
энергия

(* Последние две темы см. § 10)
36