

КОНСПЕКТ ЛЕКЦИЙ
по физике
Часть 1
Механика, колебания, волны
1
Математическое
введение




ax
+
bx
+
c
=
0
;
x1,2
=


1.2.
Длина
окружности:
.


Площадь круга: S = 4ππ = πd2 .
4



Объем
шара:



Длина
дуги
окружности:
l
=
j
×
R

2

Площадь
сектора:

Угол j выражается в радианах.
1.3. Приращение величины x:
: т.е. разность между конечным и начальным значением
х.
Убыль
величины
x
:
-
∆x
=
x
-
x


1.4.
a1
+
a2
+
.....ai
+
......an
=
,
где
знак

i=1

есть
сумма
значений
величин
по
I
от
1
до
n 

1.5. - отношение противолежащего катета к
гипотенузе;

cosa = - отношение прилежащего катета к гипотенузе;

- отношение прилежащего к противолежащему катету;
ctga = ,
sin(-a ) = -sina ;cos(-a ) = cosa
2
tg(-α) = -tgα ; ctg(-α) = -ctgα
sin00 = 0;sin900 = 1;sin1800 = 0;
cos00 = 1;cos900 = 1;cos1800 = -1
1.6 cos(900-a) = sina ; cos(900+a) = -sina
cos(1800-a) = -cosa ; cos(1800+a) = -cosa
cos(2700-a) = -sina ; cos(2700+a) = sina
cos(3600-a) = cosa ; cos(3600+a) = -cosa
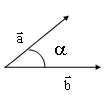
1.7. Векторы – величины, характеризующиеся численным значением, направ-
лением
и
складывающиеся
по
правилу
параллелограмма
(треугольника,
многоугольника). Модуль вектора - численное значение вектора: a = a



r

1.8.
Сложение
векторов:
с
=
а
+
b
;
c
=
(a
+
b2
+
2abcosa)1
2
r
Вычитание векторов: c = a - b
r




b a a
1.10. a = aea - единичный вектор или орт вектора , который по
r
направлению
совпадает
с
вектором
.

![]()
ea
↑↑
а
ea
=
1


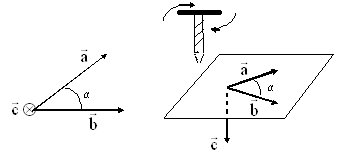
1.11.
◉
-
вектор

3
пендикулярно
плоскости
рисунка
и
к
“нам”

Ä - вектор направлен перпендикулярно плоскости рисунка и от
“нас”.
1.12.
Разложение
вектора
на
составляющие:

a
=
a
+
a
.



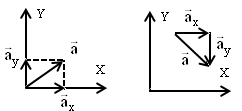
В общем случае:
a = a + a + az ,
где
ax
,
a
,
az
-
составляю-
щие вектора a вдоль коорди-
нат x, y, z. Составляющие вектора являются векторами.
1.13.
Проекции
вектора:
a
=
acosα
;
a
=
acosβ
;








a
-
проекции
вектора
на
координатные
оси
x,
y;
a
и
b
-
углы

между
вектором
a
и
положительными
полуосями
a
=
a
ex
+
a
ey
;

a = (a + a )1 2
В
общем
случае:

a
=
a
ex
+
a
ey
+
a
ez
















a
=
(a2
+
a2
+
a2)1/
2





где
ex
, ey
, ez
-
единичные
векторы



(орты)
координаты
осей
x,
y,
z
;


ex = ey = ez = 1
x
1.14.
Скалярное
произведение
двух



r
r

b
ba
-
проекции
вектора
b
на
вектор
a
.

r r
а b = b a - скалярное произведение двух векторов
коммутативно, т. е. не зависит от порядка располо-
жения сомножителей.
a = aa = aa cos 0 = a
4
1.15.
Векторное
произведение
двух
векторов:

r r r
Вектор перпендикулярен плоскости, в которой лежат векторы a и b .
Направление вектора (векторного произведения) определяют по пра-
вилу
правого
винта
(буравчика):
буравчик
располагают
перпендикулярно

плоскости, в которой лежат векторы a b и вращают от первого сомно-
жителя (вектор a ) ко второму (вектор b ) по кратчайшему пути. Поступа-
тельное движение буравчика совпадает с направлением вектора .
Производная.
y = f (x) ; ∆x и ∆y приращение аргумента x и функции y.


Dx ® 0 обозначают dx – бесконечно малое приращение аргумента, Dy ®
0 обозначают dy - бесконечно малое приращение функции.
∆y
равно тангенсу угла наклона секущей.
∆x
5

Производная
от
y:
=
(=
y')


При Dx ® 0 и Dy ® 0 секущая переходит в касательную. Следовательно:
графически производная равна тангенсу угла наклона касательной:
dy/dx = tgα
Для дальнейшего отметим, что в физике производные не принято
обозначать значком «штрих: у’». Есть специальные обозначения
только
для
функции
времени.
Если
z
=
f
(t)
,
то
производная
по
времени

обозначается
следующим
образом:
z
=
(=
z').

2


Вторая производная: .
1.17. Производные: постоянной, произведения постоянной на функцию,
суммы (разности), произведения, частного.
А. Производная от постоянной величины равна 0, т.е. если y = c, где
с = const , то y’=0
Б. Постоянный множитель можно вынести за знак производной, т.е. если
y = cu (x), где c = const, то y’=c×u’(x).
В. Производная от суммы (разности) функций равна соответствующей
сумме
(разности)
производных
этих
функций,
т.е.
если


y = u(x)+ v(x)+ w(x) , то” y = u (x) + v (x) + w (x).
Г. Если y = u(x)×v(x) , то” y = u (x)×v(x) + u(x)×v (x)
u(x)
u
(x)
×
v(x)
-
u(x)
×
v
(x)
v(x)
1.18.
Некоторые
табличные
производные:

(xn
)
=
nxn-1
,
(ex
)
=
ex
,
(a
)
=
a
ln
a



, (cos x) = -sinx , (sinx) = cosx



, (ctgx) = -

Если a = const , то (cosax) = -asinax , (sinax) = acosax.
6
1.19. Частная производная. Если z есть функция двух переменных x и y,
то частной производной по x от функции z = f (x, y) называется произ-
водная по x , вычисленная в предположении, что y есть постоянная вели-
чина.
Аналогично
определяется
частная
производная
по
y.

z
=
x
y3
, то”
=
2xy3
,
=
3x2y2
1.20.
Дифференциал
функции.

Если , где dy - дифференциал функции
y = f (x) – т.е. бесконечно малое приращение функции при бесконечно
малом приращение аргумента.

S » Dxi - площадь ограниче-
ния
кривой
y(x)
на
участке
от
a
до
b.




















S = Dxi ⇒
Dxi
®0






это есть интеграл
Первообразная
F(x)
для
функции







y(x):


b
y(x)dx
=
F(x)
=
F(b)
-
F(a)



b
= ln x = ln b - ln a = ln
1.22. Интеграл от суммы (разности) функции равен сумме (разности) ин-
тегралов, т.е.
∫[f
(x)
+
f2
(x)
-
f3(x)]×
dx
=
∫f
(x)dx
+
∫f
(x)dx
-
∫f
(x)dx

Постоянный множитель можно выносить за знак интеграла, т.е.
c
×
f
(x)dx
=
c∫
f
(x)dx
,
где
с
-
постоянная
величина.

Некоторые
табличные
интегралы.

∫dx
=
x
+
const
;
∫
7
n+1




x
dx
=
+
const;
где
n
¹-1;

n
+
1
∫e dx = ex + const
∫cos x × dx = sin x + const ; ∫sin x × dx = - cos x + const
8