

§ 24. Принцип относительности Галилея
Рассмотрим две системы отсчета (рис. 24.1). Систему обозначен-
ную
K,
будем
считать
неподвиж-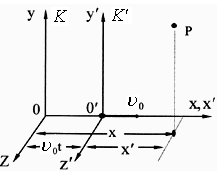
ной, систему K¢ - подвижной; ее
скорость относительно неподвиж-
ной системы постоянна и равна u0 .
Координатные оси систем выберем
так, что бы они были параллельны
друг другу; в начальный момент
времени начало координат систем
совпадает; скорость u0 направлена
вдоль оси х. (Такое расположение
осей
выбрано
для
упрощения
вида

Рис.24.1 нижеприведенных уравнений. Вы-
воды, которые будут получены,
справедливы для любого взаимного расположения систем K и K¢).
Найдем связь координат некоторой точки «р» в системе K с ее
координатами в системе K¢ . Из рис. (24.1) видно
x=x¢+u0t; y=y¢; z=z¢; t=t¢ (24.1)
(Последнее из равенств (24.1) означает, что длительность некоторого со-
бытия в системе K и K¢ - одинаковое). Уравнения (24.1) называются пре-
образованиями Галилея.
Найдем связь между скоростями точки “р” по отношению к си-
стеме отсчета K и K¢ :
ux = x; ux = x ⇒
Из (24.1) следует: x = x +u0 ⇒ ux = ux + v0 ,
uy
=
uy
;
uz
=
uz
⇒

u = u +u0
где u - скорость точки относительно системы K, u -скорость точки от-
носительно системы K¢ ,u0 -скорость подвижной системы относительно
69
неподвижной системы. Соотношение (24.2) дает правило сложения скоро-
стей в классической механике.
Найдем ускорение в системе K и K¢ :
a = u; a = u
После дифференцирования (24.2) получим (учитывая, что
r r
(24.3)

Отсюда следует, что ускорение тела во всех системах отсчета, движущих-
ся друг относительно друга прямолинейно и равномерно, одинаковое. В
частности,
если
одна
из
систем
инерциальная
(т.е.
при
отсутствии
сил

a = 0 ), то и остальные будут инерциальными (т.е. a = 0 ).
Второй
закон
Ньютона
в
системе
k
и
k‘будет
иметь
вид:

F = ma; F = ma (24.4)
Из (24.3) и (24.4) следует, что силы, действующие на тело в системе k и
k‘тоже одинаковые. Следовательно, уравнения динамики не изменяются
при переходе от одной инерциальной системы отсчета к другой, т.е.
уравнения динамики инварианты по отношению к преобразованиям коор-
динат от одной инерциальной системы отсчета к другой. С механической
точки зрения все инерциальные системы отсчета эквивалентны: все ме-
ханические явления в различных инерциальных системах отсчета проте-
кают одинаковым образом. Это утверждение носит название принцип от-
носительности Галилея.
§ 25. Постулаты Эйнштейна.
Преобразования Лоренца, следствия из них
Специальная теория относительности Эйнштейна (релятивистская
механика) основана на двух постулатах (утверждениях), которые носят
названия принцип относительности Эйнштейна и принцип постоянства
скорости света
Принцип относительности Эйнштейна является распространени-
ем принципа относительности Галилея (механического принцип относи-
тельности) на все физические явления. Согласно этому принципу все за-
коны природы одинаковы во всех инерциальных системах отсчета. Сле-
довательно, уравнения, выражающие законы природы, инварианты по
отношению к преобразованиям координат и времени от одной инерциаль-
ной системы отсчета к другой.
70
Принцип постоянства скорости света утверждает, что скорость
света в пустоте одинакова во всех инерциальных системах отсчета и не
зависит от движения источников и приёмников света
Возьмём две инерциальных системы отсчета, аналогичных тем,
что рассмотрены в § 25: система K неподвижная, система K¢ движется
относительно системы K со скоростью u0 . Для того чтобы выполнялись
постулаты Эйнштейна переход от координат и времени, отсчитанных в
системе K¢ , к координатам и времени, отсчитанных в системе K , должен
выполнятся
согласно
следующим
соотношениям:


x
+u0t
t
+
x
u0
c2

2 2
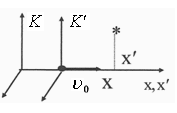
лённый промежуток времени. Свяжем с
этой точкой систему отсчета K¢- точка
относительно системы K¢ покоится, си-
стема K¢движется относительно системы
K со скоростью u0 (рис. 25.1). Началу
события в системе K¢ соответствует неко-
торый момент времени t¢1, концу события
– t¢2, событие происходит в одной и той же точке с координатой x¢. Дли-
тельность события в этой системе координат равно ¢ - t1
∆t0 - это время, измеренное по часам, движущимся со скоростью тела, в
котором происходит событие. Это время называют собственным време-
нем тела.
Найдем длительность этого события в системе K¢. В этом случае
длительность события определяется по неподвижным часам. Началу со-
71
бытия в этой системе отсчёта соответствует момент времени t1, концу
события – t2. Время t1и t2 согласно преобразованиям Лоренца (25.1) рав-
ны:


t1
=
t2
=
(25.2)


Длительность события в системе K:
∆t=t1-t2 (25.3)
Подставим
в
(25.3)
уравнения
(25.2):

∆t = t2 - t1 = ⇒
2
(25.4)



2
Интервал времени Dt - это длительность события измеренная по непо-
движным часам, Dt0 - длительность события измеренная по часам дви-
жущимся со скоростью u0 . Из уравнения (25.4) следует, что Dt > Dt0 ,
поэтому можно сказать, что движущееся часы идут медленнее, чем поко-
ящиеся, а собственное время наименьшее.
II. Длина тел в разных системах. Пусть имеется стержень, расположен-
ный вдоль оси x и двигающийся со скоростью u0. Аналогично пункту I
можно показать, что длина стержня l0 в системе K¢ (т.е. длина покояще-
гося стержня) и длина стержня l в системе K (т.е. длина, измеренная в
системе относительно которой он движется) разная. Повторяя рассужде-
ния пункта I, получим:
1
-u0
c2

Видно, что l < l0 , т.е. у движущихся тел размеры их в направлении дви-
жения сокращаются тем больше, чем больше скорость движения. Это яв-
ление называется лоренцевым сокращением.
III. Сложение скоростей. Для упрощения формул будем считать, что
скорость частицы параллельна оси х. Тогда модуль скорости частицы в
системе
K
и
K¢
соответственно
равен:

¢
υ = υx = ; υ' = υ'x =
dt dt

¢ ¢ ¢ ¢
dx
=
⇒
dx
=
dt
⇒

1-u0 с2 1-u0 с2


dx
=
dt
,
(25.6)

2
dt
+
dx
u0
/c2
¢
¢

1-u0 с2 1-u0 с2
dt = dt . (25.7)
2
Разделим уравнение (25.6) на (25.7) и учтём (25.5):
u'+u0
.
(25.8)

1+u'u0 с2
В случае малых скоростей u0 << c формула (25.8) переходит в формулу
сложения скоростей классической (нерелятивистской) механики
(§ 24,ур-е (24.2)).
Пусть
скорость
u'=
c
.
Из
(25.8)
получим:

u = = c
1+ cu0 с2
что согласуется со вторым постулатом Эйнштейна.