

3.4 Симплекс-метод.
Существует универсальный способ решения задач ЛП, называемый симплекс-методом.
Идея симплекс-метода. Сначала надо найти некоторую (начальную) вершину многогранника допустимых решений (начальный опорный план). Затем надо проверить это решение на оптимальность. Если оно оптимально, то решение найдено; если нет, то перейти к другой вершине многогранника и вновь проверить на оптимальность. Надо заметить, что при переходе от одной вершины к другой значение целевой функции убывает (в задаче на минимум) или возрастает (в задаче на максимум).
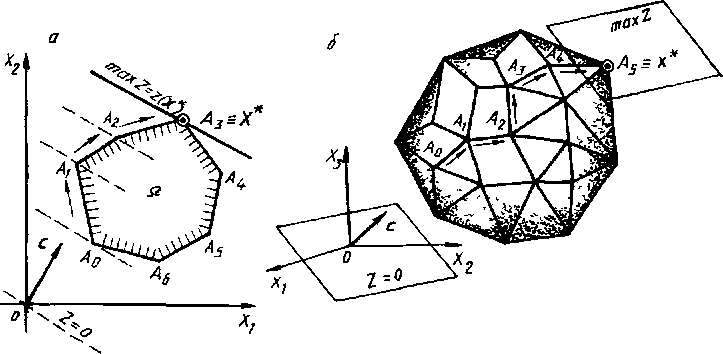
рис.4.1
3.4.1 Построение начального опорного плана.
Рассмотрим три случая.
1-й случай. Пусть в системе ограничений имеется единичный неотрицательный базис. Например, она имеет вид
![]()
Говорят, что ограничение канонической ЗЛП имеет предпочтительный вид, если при неотрицательности его правой части (bi 0) левая часть содержит переменную, входящую с коэффициентом, равным единице, а в остальные ограничения – с коэффициентом равным нулю. Если каждое ограничение канонической ЗЛП имеет предпочтительный вид, т. е. система ограничений приведена к единичному неотрицательному базису, то начальный опорный план строится весьма просто. Предпочтительные переменные выбираются в качестве базисных, а все остальные – свободные. Свободные переменные приравниваются нулю, а базисные переменные – свободным членам.
Пример. Найти начальный опорный план ЗЛП
Решение В первом ограничении предпочтительной переменной является х4, во втором – х2. Система приведена к положительному единичному базису. Свободные переменные х1 и х3 приравниваются нулю. Получим невырожденный начальный опорный план:
х0 = (0; 3; 0; 2); Z(x0) = 0.
2-й случай. Пусть система ограничений имеет вид
![]()
Сведем задачу к каноническому виду, добавив к левым частям системы ограничений дополнительные переменные хn+i 0 (i=1…m).
Получим систему ограничений
![]()
эквивалентную исходной и имеющую предпочтительный вид. Отсюда получаем начальный опорный план:
![]()
В
целевую функцию дополнительные переменные
вводятся с коэффициентами, равными
нулю:
![]()
Пример. Найти начальный опорный план ЗЛП
Решение Приведем задачу к каноническому виду:
Система ограничений имеет предпочтительный вид. Начальный опорный план
![]()
2-й случай. Пусть система ограничений имеет вид
![]()
Перейдем к каноническому виду путем введения дополнительных переменных хn+i 0 (i=1…m):
![]()
Теперь система ограничений, вообще говоря, не имеет предпочтительного вида. В этом случае вводят искусственный базис путем перехода к М- задаче:
![]()
где в целевой функции знак «-» относится к задаче максимизации. Если некоторые из уравнений исходной системы ограничений имеют предпочтительный вид, то в них не вводят искусственные переменные. Начальный опорный план М – задачи имеет вид
![]()
Между оптимальными планами исходной задачи и М – задачи имеется следующая связь: если в оптимальной задачи и М – задачи все искусственные переменные wi* равны нулю, то значения оставшихся координат плана х* дадут оптимальный план исходной задачи.
Пример. Найти начальный опорный план задачи
Решение. Вводя дополнительные х5, х6, х7 и искусственные переменные, переходим к задаче в каноническом виде и к М – задаче:
Ее начальный опорный план
![]()