

11. Основные понятия и определения по нелинейным системам.
Нелинейные САУ – САУ, в которой хотя бы один элемент (звено) описывается нелинейными дифференциальными и/или алгебраическими уравнениями.
Суть нелинейных систем заключается в том, что реакция системы на любую комбинацию внешних воздействий не равна сумме реакций на каждое из этих воздействий, поданных на систему порознь, то есть принцип суперпозиции не применим. Следовательно нет общей теории нелинейных дифференциальных уравнений, на основе которой могла бы быть создана общая теория нелинейных систем автоматического управления. Существует лишь ряд частных методов для решения некоторых видов нелинейных уравнений.
Вместе с тем, если не ограничивать диапазон на изменения входных воздействий, то все реальные системы автоматического управления оказываются нелинейными. Трудность исследования нелинейных систем заставляет упрощать их описание. Желательным пределом такого упрощения является приближенное описание их линейными уравнениями, хотя бы в некоторых из интересующих нас режимов. Это называется линеаризацией нелинейных систем.
Линеаризация – (от лат. linearis — линейный), один из методов приближённого представления замкнутых нелинейных систем, при котором исследование нелинейной системы заменяется анализом линейной системы, в некотором смысле эквивалентной исходной. Применяя линеаризацию, можно выяснить многие качественные и особенно количественные свойства нелинейной системы.
Основные методы исследования нелинейных САУ.
Метод фазовой плоскости.
Различают два типа: точные методы исследования и приближенные.
Метод фазовой плоскости – исследование нелинейной системы в геометрическом пространстве. В котором величины входящие в решение уравнения определяют состояние системы. Например, если система описывается уравнением второго порядка, то фазовое пространство будет двухмерным(x, y), если третьего – трехмерным(x, y, z), n-го порядка, то n-мерное.
Состоянию системы в каждый момент времени, определяемому значениями ее координат, соответствует определенная точка фазового пространства. Эта точка называется изображающей точкой. При изменении состояния системы изображающая точка будет перемещаться, описывая траекторию, которая называется фазовой траекторией. Фазовая траектория дает полное представление о характере процесса в системе, кроме его временной оценки.
Если в качестве координат взять отклонения xi=Xi — Xiуст величин Xi от их значений Xiуст соответствующих некоторому установившемуся режиму системы, то этому режиму будет соответствовать равенство нулю всех xi, т. е. начало координат фазового пространства. В этом случае для оценки устойчивости системы надо знать, как при t→∞ ею перемещается изображающая точка относительно начала координат. Для линейных систем в случае устойчивой системы все фазовые траектории асимптотически стягиваются в начало координат, а в случае неустойчивой — уходят в бесконечность.
Метод дифференциальных уравнений
Дифференциальное уравнение замкнутой нелинейной системы n-го порядка (рис. 1) можно преобразовать к системе n-дифференциальных уравнений первого порядка в виде:
![]()
где:
![]() – переменные, характеризующие поведение
системы (одна из них может быть регулируемая
величина);
– переменные, характеризующие поведение
системы (одна из них может быть регулируемая
величина);
![]() – нелинейные функции; u – задающее
воздействие.
– нелинейные функции; u – задающее
воздействие.
Обычно, эти уравнения записываются в конечных разностях:
![]() ,
,
где
![]() – начальные условия.
– начальные условия.
Если
отклонения
![]() не большие, то эту систему можно решать,
как систему алгебраических уравнений.
не большие, то эту систему можно решать,
как систему алгебраических уравнений.
(писать дальше по усмотрению)
Нелинейные звенья систем управления. Основные характеристики типовых нелинейных звеньев.
Нелинейные звенья систем управления.
При рассмотрении различных нелинейных систем, в них встречаются нелинейности самого различного вида.
Нелинейность всегда характеризуется соответствующей функцией z = z(x), где x – характеризует одномерную нелинейность. Возможны случаи и многомерных нелинейностей, когда переменная z — функция нескольких переменных. Примером двумерной нелинейности является звено, в котором скорость v движения поршня представляет собой функцию переменных γ и у.
Примерами многомерных нелинейностей могут служить у - показатель оптимальности, зависящей от нескольких переменных (х,f), устройство запоминания экстремума r (y,y)...
Многомерные нелинейности можно так же представить соединением одномерных, что упрощает расчеты.
Нелинейные звенья можно классифицировать по различным признакам: симметрии (такую характеристику называют симметричной относительно оси ординат (рис.1 з, е) или четно-симметричной;
с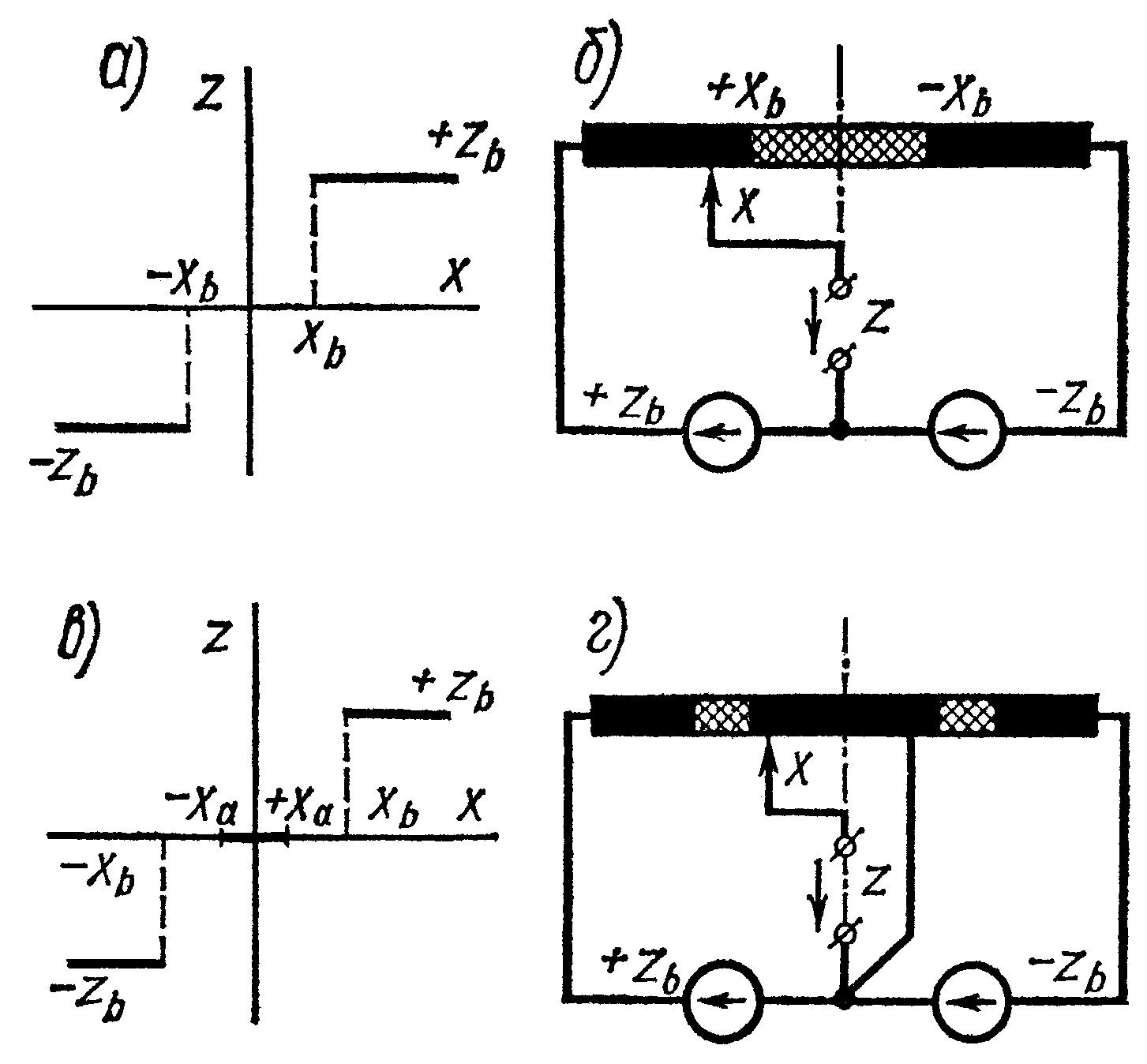
 имметричной
относительно начала координат или
нечетно-симметричной(рис.1 б, г).),
гладкости (если в любой точке характеристики
z
(х) существует
производная dz/dx,
то
характеристика относится к гладким.
Если на характеристике имеются изломы,
в которых производная dz/dx
имеет
разрыв, то характеристика относится к
ломаным
Большую группу ломаных характеристик
представляют кусочно-линейные
характеристики,
состоящие из отрезков прямых..
имметричной
относительно начала координат или
нечетно-симметричной(рис.1 б, г).),
гладкости (если в любой точке характеристики
z
(х) существует
производная dz/dx,
то
характеристика относится к гладким.
Если на характеристике имеются изломы,
в которых производная dz/dx
имеет
разрыв, то характеристика относится к
ломаным
Большую группу ломаных характеристик
представляют кусочно-линейные
характеристики,
состоящие из отрезков прямых..
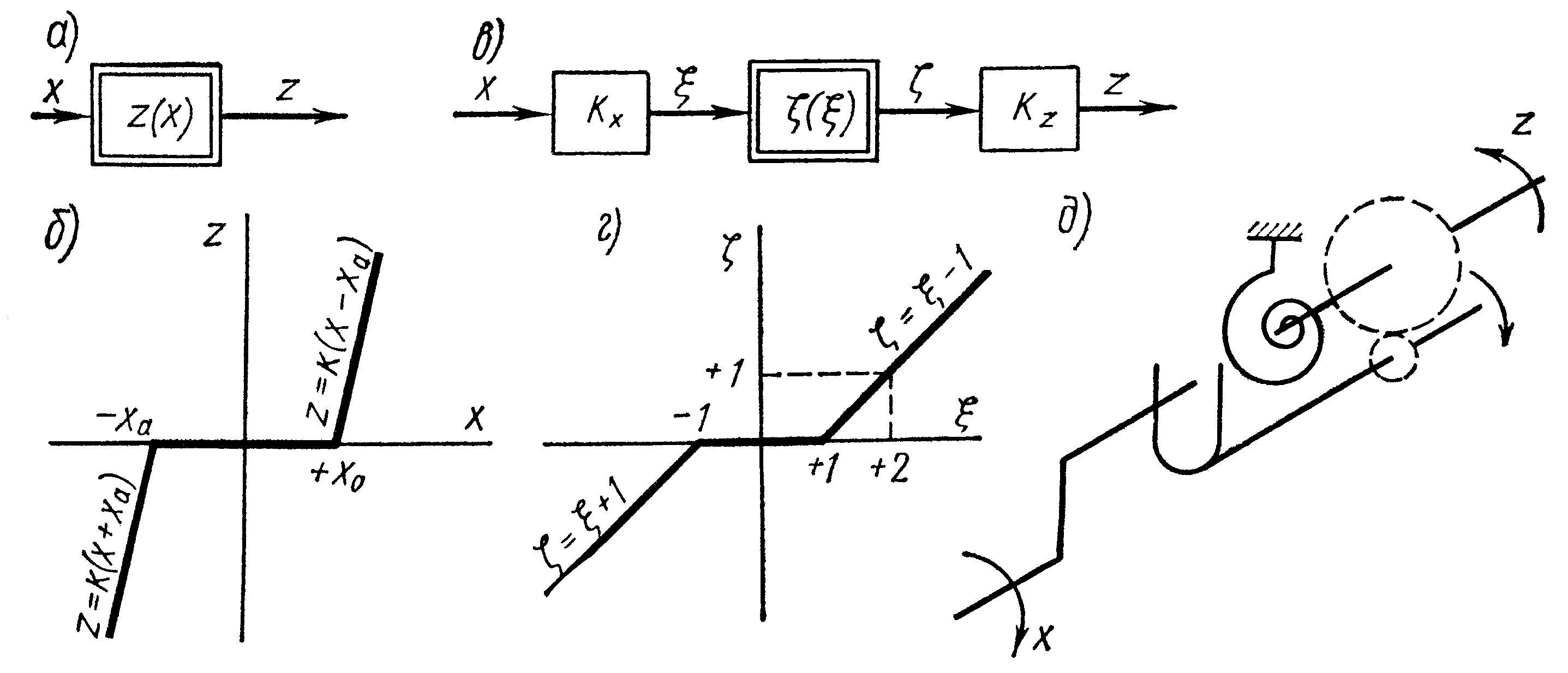
В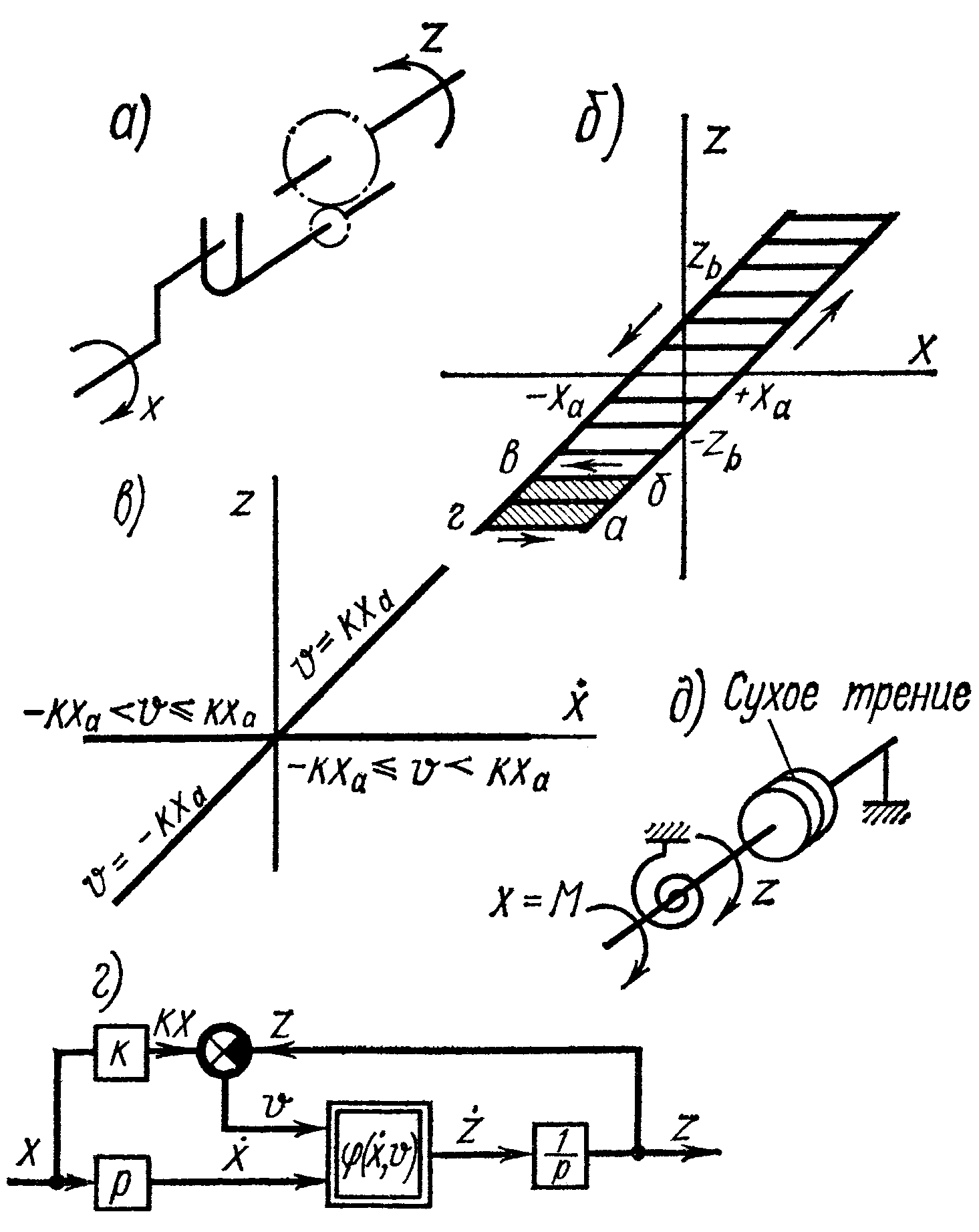 ряде случаев с целью облегчения расчета
гладкие характеристики бывает удобно
приближенно заменять кусочно-линейными
ломаными.), однозначности (если каждому
значению х
соответствует
одно определенное значение z,
то характеристика однозначная.
Если некоторому значению х
соответствует
несколько значений z
в
зависимости от режима, то характеристика
многозначная,
при
этом число возможных значений z
может
лежать в пределах от 2 до ∞.), непрерывности
характеристик (Если функция z
(x)
не
имеет разрывов, то характеристику
называют непрерывной.
При
наличии разрывов функции z
(x)
характеристику
называют разрывной.
Все
рассмотренные примеры неоднозначных
характеристик относятся к разрывным.).
ряде случаев с целью облегчения расчета
гладкие характеристики бывает удобно
приближенно заменять кусочно-линейными
ломаными.), однозначности (если каждому
значению х
соответствует
одно определенное значение z,
то характеристика однозначная.
Если некоторому значению х
соответствует
несколько значений z
в
зависимости от режима, то характеристика
многозначная,
при
этом число возможных значений z
может
лежать в пределах от 2 до ∞.), непрерывности
характеристик (Если функция z
(x)
не
имеет разрывов, то характеристику
называют непрерывной.
При
наличии разрывов функции z
(x)
характеристику
называют разрывной.
Все
рассмотренные примеры неоднозначных
характеристик относятся к разрывным.).
Характеристика типовых нелинейных звеньев.
Звенья с однозначными непрерывными характеристиками.
Такими характеристиками обладают некоторые схемы электронных, магнитных и гидравлических усилителей в области малых входных сигналов. Простейшей механической моделью зоны нечувствительности является
система соединения двух валов с пружинным возвратом ведомого вала в нейтральное положение при наличии участка свободного хода (люфта) в системе передачи.
Звенья с однозначными разрывными характеристиками.
Звено
типа «двухпозиционное реле без
гистерезиса». Однозначная характеристика
двухпозиционного поляризованного реле
показана на рис.14.4, а.
При
модуле входного сигнала
![]() контакты реле разомкнуты и о величине
напряжения z,
снимаемого с контакта реле, ничего
сказать нельзя.
контакты реле разомкнуты и о величине
напряжения z,
снимаемого с контакта реле, ничего
сказать нельзя.
Звенья с двузначными характеристиками.
Звено типа «двухпозиционное реле с гистерезисом».
Звенья с однозначными разрывными характеристиками.
Звено типа «двухпозиционное реле без гистерезиса». Однозначная характеристика двухпозиционного поляризованного реле показана на рис.14.4, а. При модуле входного сигнала контакты реле разомкнуты и о величине напряжения z, снимаемого с контакта реле, ничего сказать нельзя.
Звенья с двузначными характеристиками.
Звено типа «двухпозиционное реле с гистерезисом».
Рассмотренные выше однозначные релейные характеристики соответствуют некоторой идеализации реальных систем. В действительности обычно величина входного сигнала, при котором происходит скачок выходной величины z, бывает различной для переключения контакта в прямом и обратном направлениях. Например, в двухпозиционном поляризованном реле при его симметричной регулировке переключение контакта в одном направлении происходит при некотором напряжении, а переключение в обратном направлении — при таком же напряжении противоположного знака.
Звенья с многозначными характеристиками.
Звено типа «люфт». Одна, из нелинейностей, наиболее часто встречающихся в механических системах, связана с наличием зазоров в системе передачи. Если в механической модели нелинейности типа «зона нечувствительности» (см. рис.14.2, д) убрать пружину, стремящуюся возвратить ведомый вал в нулевое положение, то получится модель нелинейности типа «люфт»