

Критерий устойчивости Михайлова
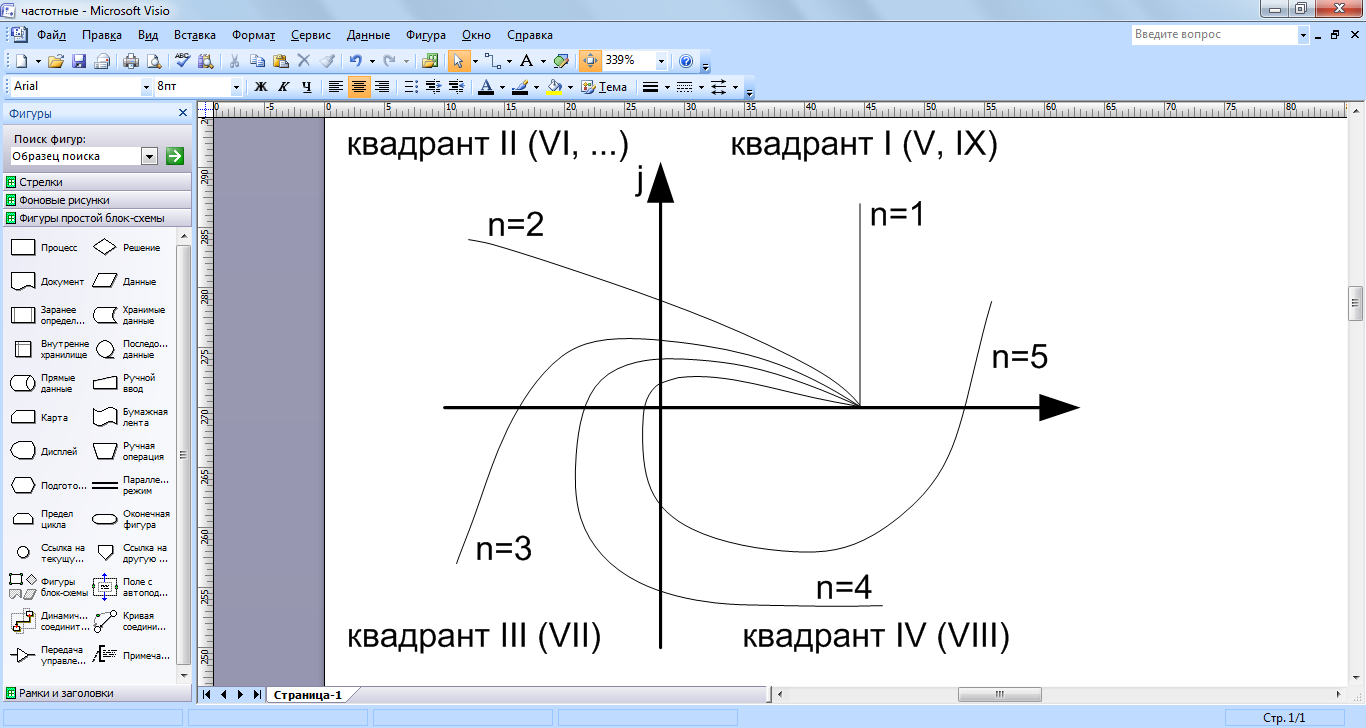
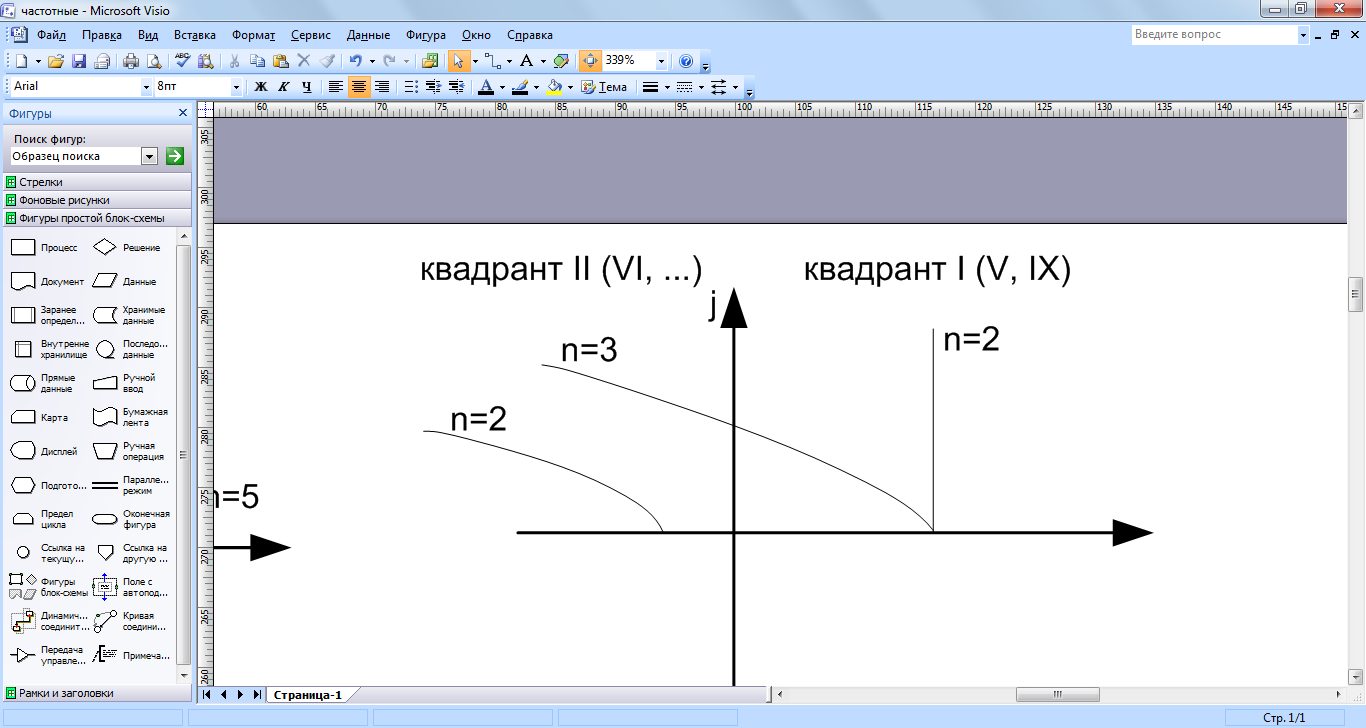
Для устойчивости системы необходимо и достаточно, чтобы годограф Михайлова начинался на положительной вещественной полуоси и обходил последовательно n квадрантов, нигде не обращаясь в 0, где n – порядок ДУ.
D(p) = a0pn + a1pn-1 + … + an
p = jw Неустойчивая система:
D (jw)
= X(w)
+ jY(w)
(jw)
= X(w)
+ jY(w)
Устойчивая система:
Граница устойчивости:
Причем, годографы 2 и 3 на границе апериодической устойчивости, 3* - на границе колебательной устойчивости.
Частотные критерии не ограничены порядком ДУ и, как правило, применяются, когда порядок ДУ достаточно велик.
Критерий устойчивости Найквиста
Критерий Найквиста применяют для анализа устойчивости замкнутых систем по АФЧХ разомкнутых систем. Здесь можно выделить 2 случая:
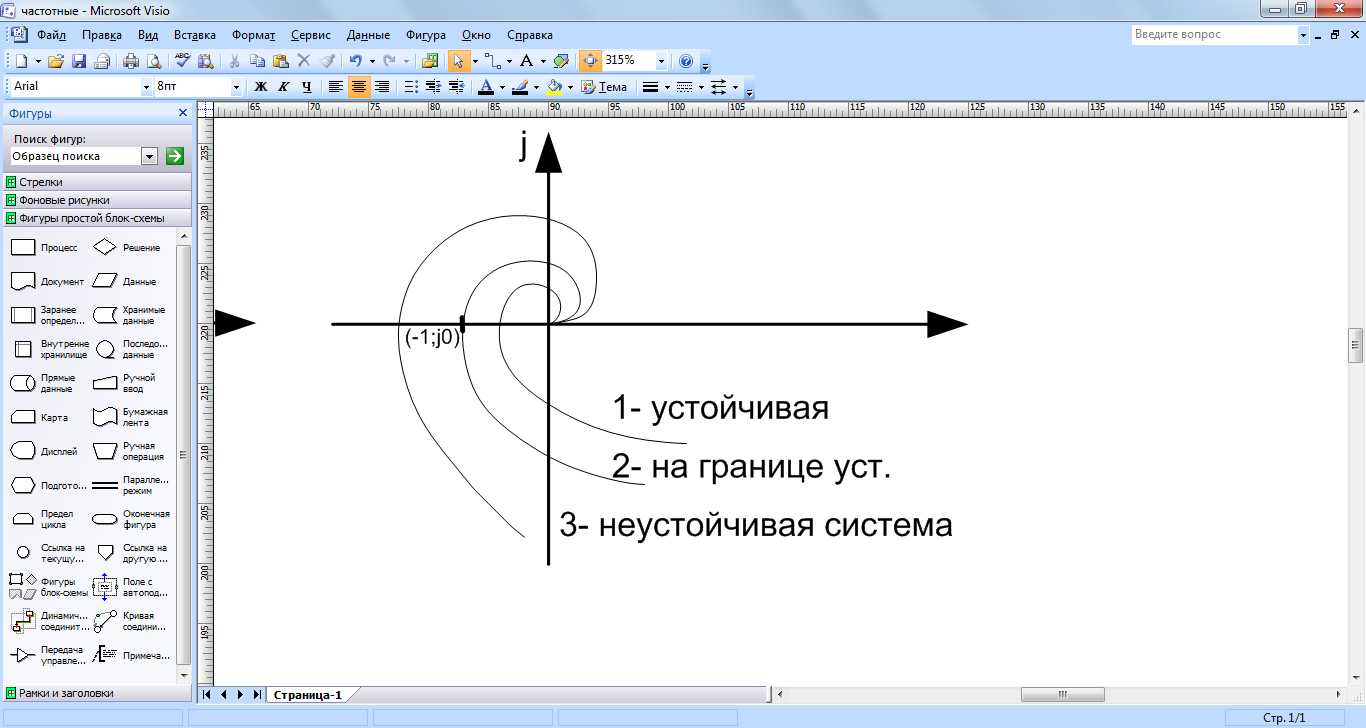
1.Разомкнутая система устойчива
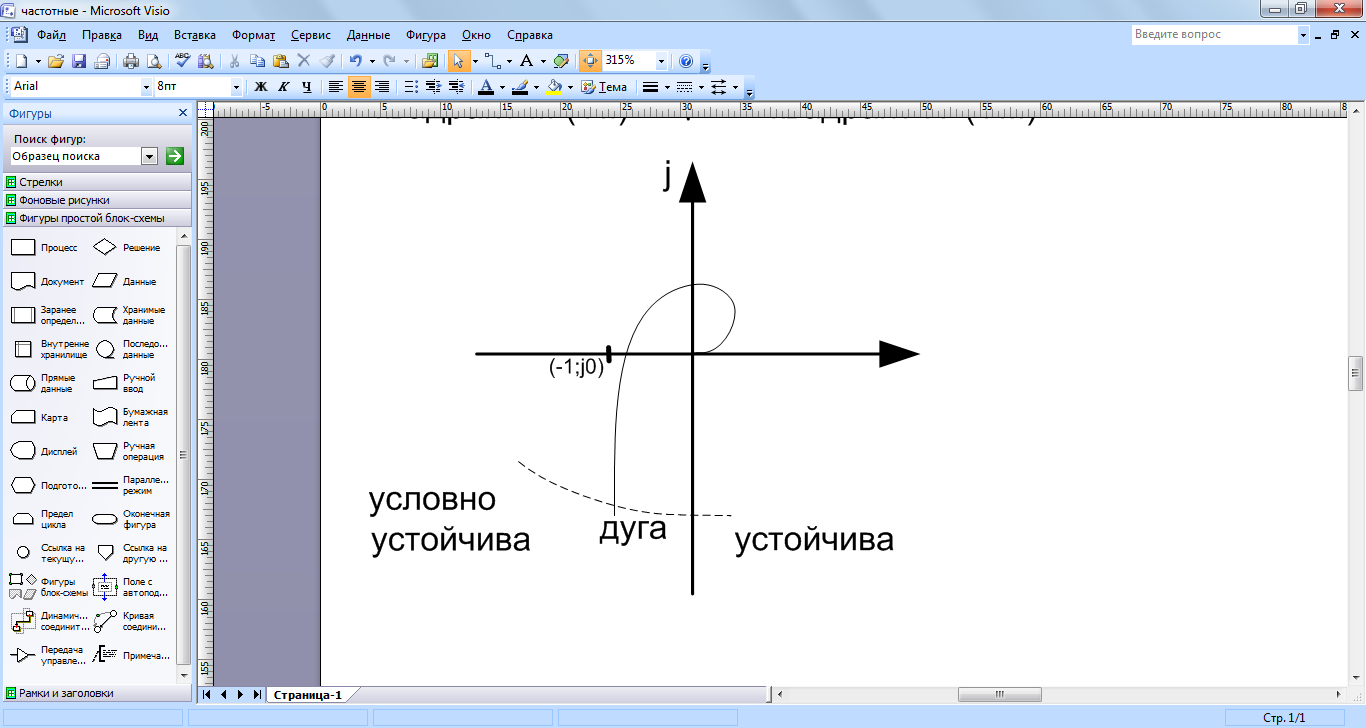
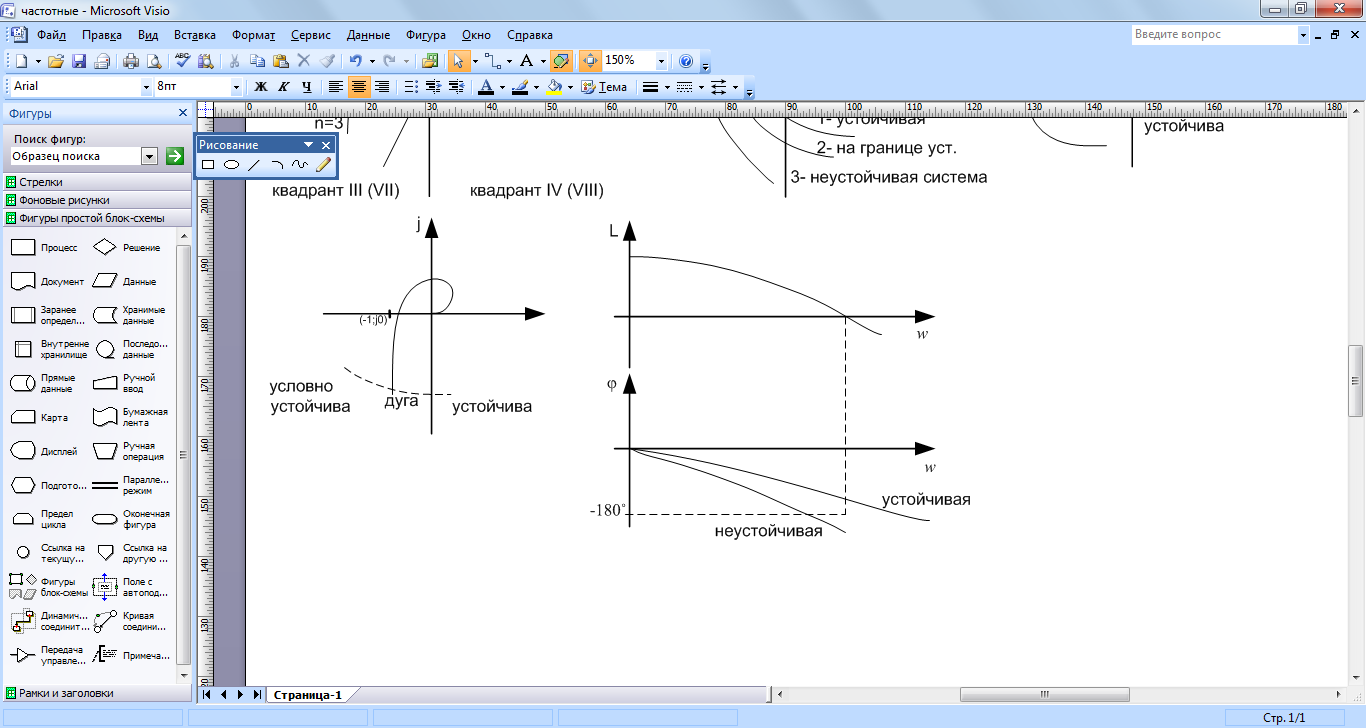
Для устойчивости замкнутой системы при устойчивой разомкнутой необходимо и достаточно, чтобы АФЧХ разомкнутой системы не пересекала и не охватывала точку с координатами (-1;j0).
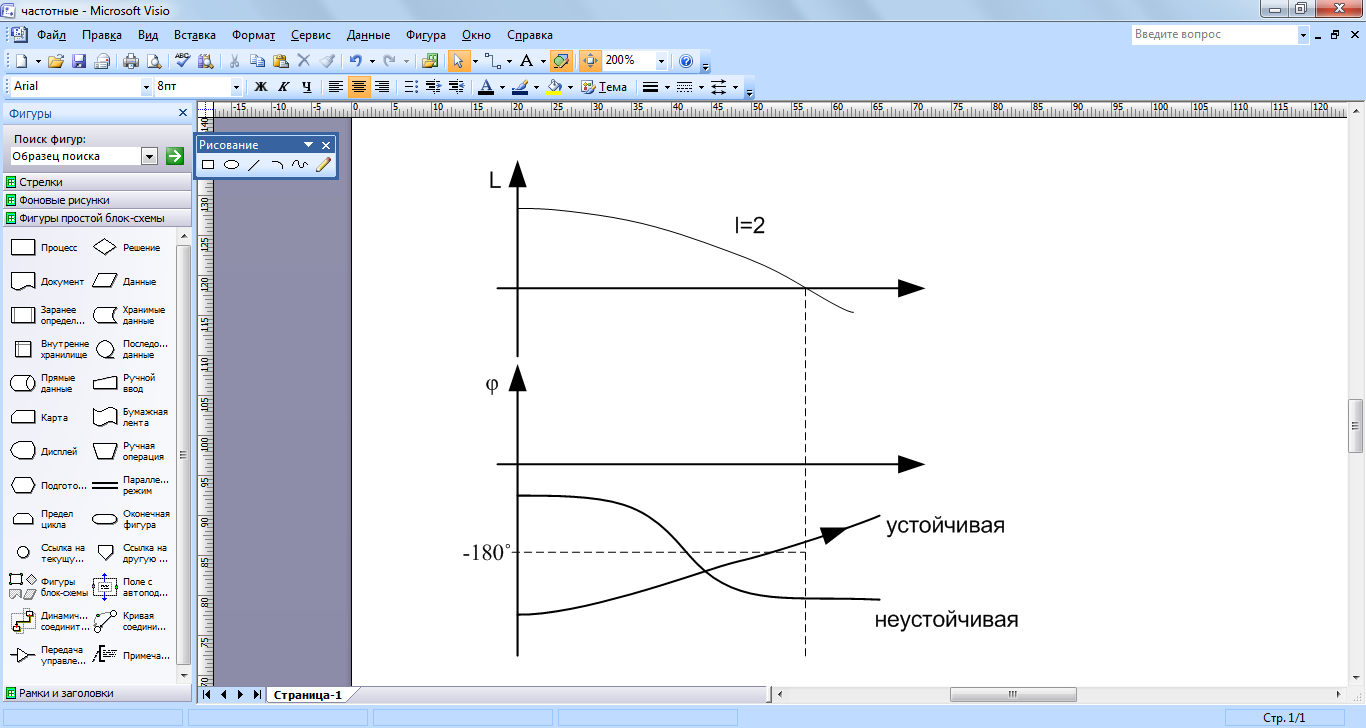
При использовании логарифмических характеристик замкнутая система будет устойчива (при устойчивой разомкнутой), если ЛАЧХ пересекает ось абсцисс (ОХ) раньше, чем ЛФЧХ переходит через 180˚.
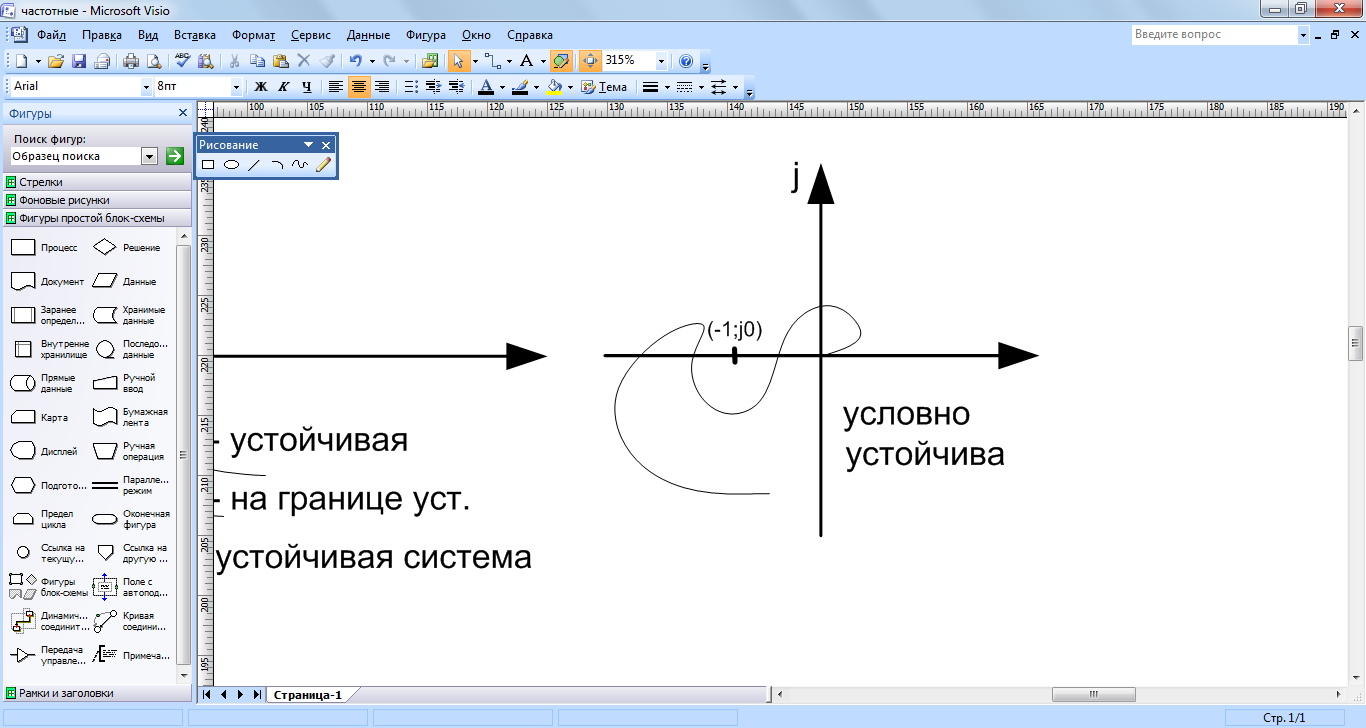
2.Разомкнутая система неустойчива
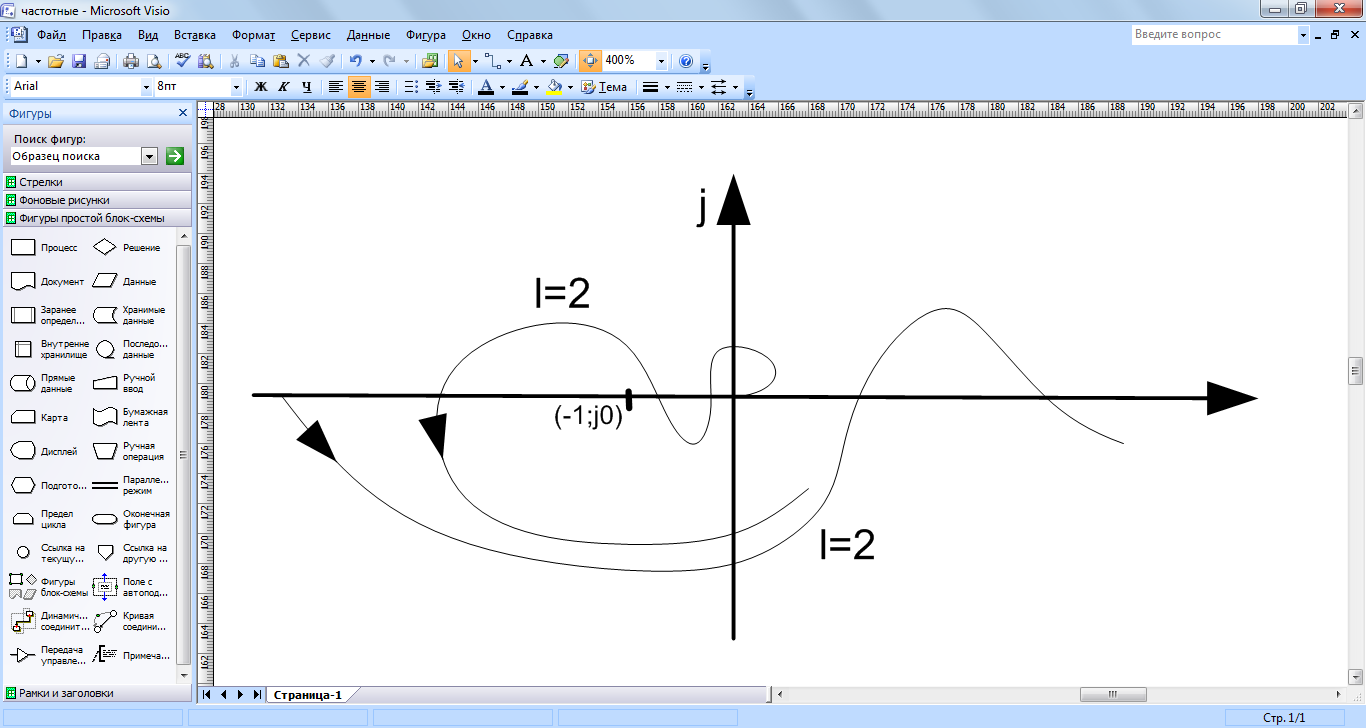
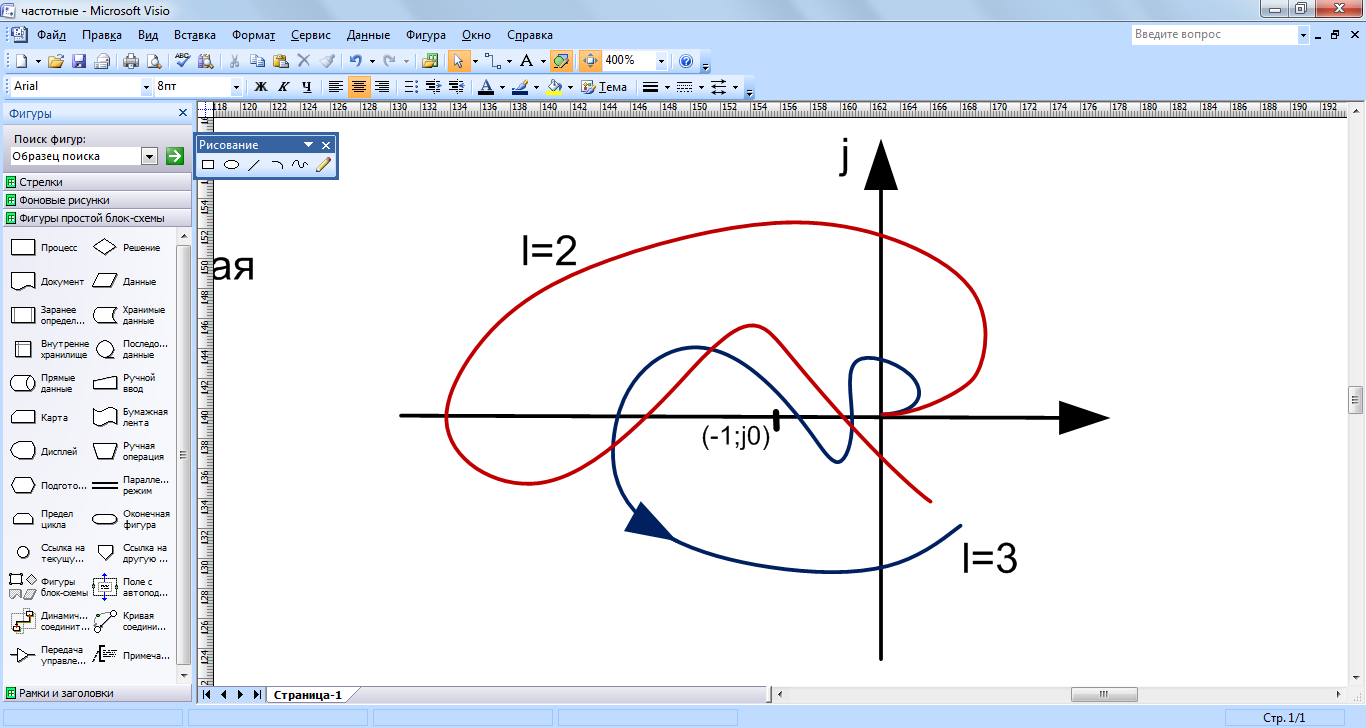
Для устойчивости замкнутой системы при неустойчивой разомкнутой необходимо и достаточно, чтобы АФЧХ разомкнутой системы пересекала ось абсцисс в положительном направлении, левее точки с координатами (-1;j0) на l/2 раз большее, чем в отрицательном, где l – число правых корней разомкнутой системы.
Правило перехода:
Положительным направлением считается пересечение АФЧХ оси абсцисс сверху вниз. Отрицательным – наоборот.
Устойчивые системы: Неустойчивые системы:
Если рассматриваются логарифмические характеристики, то для устойчивости замкнутой системы необходимо и достаточно, чтобы ЛФЧХ переходила через 180˚ в положительном направлении на l/2 раз больше, чем в отрицательном при положительных значениях ЛАЧХ, где l – количество правых корней разомкнутой системы.
Правило перехода: положительным переходом считается переход через 180˚ снизу вверх, а отрицательным – наоборот.
Управляемость и наблюдаемость динамических систем
Описание динамической системы в пространстве состояний позволяет ввести такие важнейшие понятия как управляемость и наблюдаемость, равные по важности такому фундаментальному понятию как устойчивость.
Управляемость характеризует принципиальную возможность изменения состояния системы с помощью входных сигналов, соответственно наблюдаемость состояния системы - по наблюдению за её выходным сигналом.
Для простоты рассмотрим стационарную систему для пояснения и понятия управляемости, и наблюдаемости. Рассмотрим систему, описываемую следующими матрицами:
![]()
![]() D=[0]
D=[0]
Представим систему в виде графа:
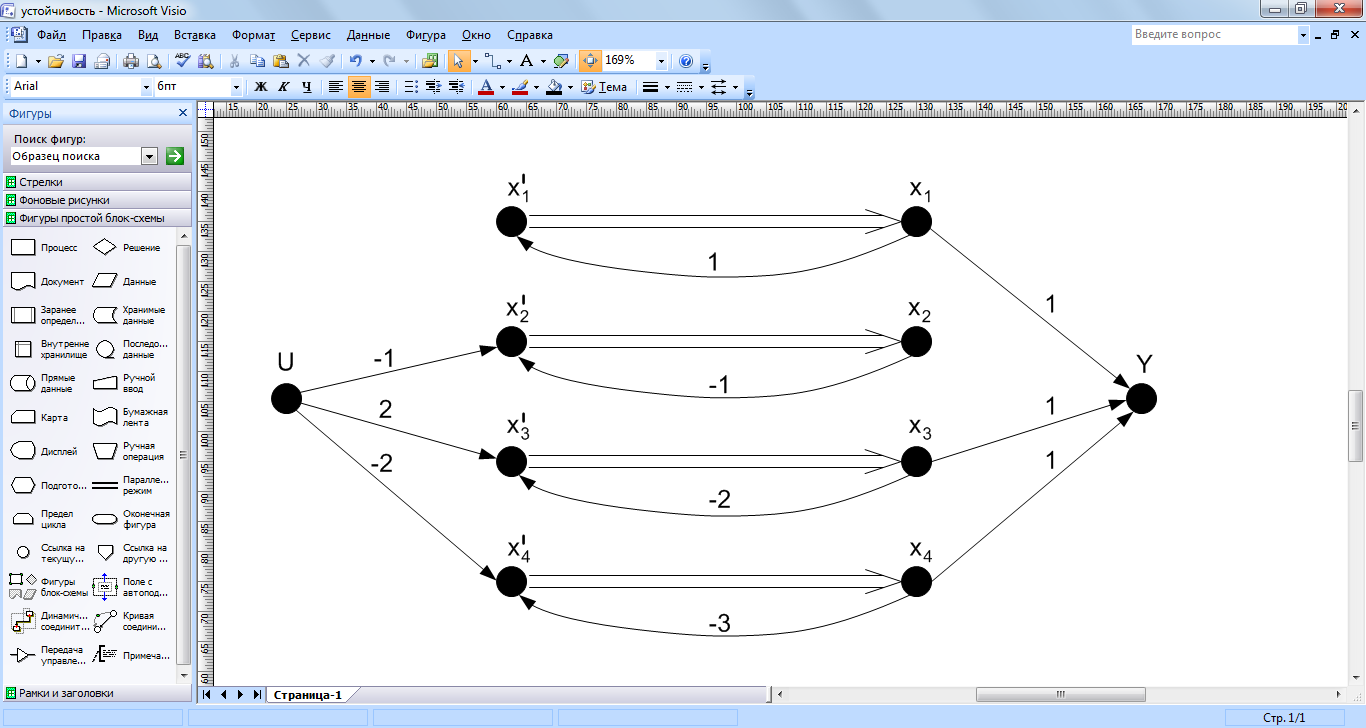
Из представленного графа видно, что переменная х1 не соединена со входом U, поэтому входной сигнал напрямую не может влиять на изменение переменной х1. Таким образом, переменная х1 является неуправляемой, а вся система является управляемой не полностью. Переменная х2 не соединена с выходом Y, и поэтому по наблюдению выходного сигнала, в принципе, невозможно с помощью прямой зависимости определить значение х2. Таким образом, переменная х2 является ненаблюдаемой, а вся система не полностью наблюдаема.
Таким образом, динамическая система называется управляемой, если для любого начального состояния X(0) существует управление U(t), переводящее систему за конечное время T в любое другое наперёд заданное состояние Х(Т).
Динамическая система является наблюдаемой, если по наблюдениям за выходным сигналом Y(t) в течение некоторого времени Т можно определить её начальное состояние Х(0).
Судить о том, является ли система управляемой или наблюдаемой по виду её уравнения состояния в общем случае чрезвычайно сложно (просто – для одномерных систем).
Необходимое и достаточное условие управляемости и наблюдаемости системы определяется теоремами, полученными Кауманом:
Чтобы динамическая система была управляемой необходимо и достаточно, чтобы матрица управляемости R имела ранг, равный n – количество переменных.
R = [A0B, A1B, … , An-1B]
Чтобы динамическая система была наблюдаемой, необходимо и достаточно, чтобы матрица наблюдаемости Q имела ранг, равный n.
Q = [(AT)0 * (CT), (AT)1 * (CT), … , (AT)n-1 * (CT)]
//Пояснения:
//A, B, C, D – матрицы, определяющие особенности различных систем. Матрица A //определяет внутренние свойства системы, B – входные устройства системы, С – выходное //устройство, D – связь входа с выходом.
//Ранг матрицы – количество определителей, которые не равны нулю.