

Правила структурных преобразований
Если имеется структурная схема, которую нужно преобразовать к одноконтурному виду, то основные правила таких преобразований следующие.
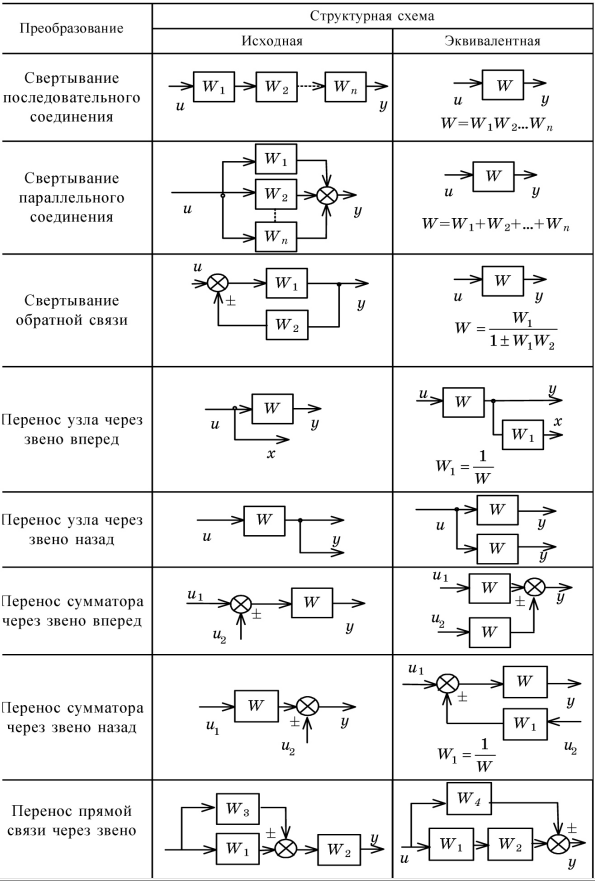
1. Если имеется цепочка из последовательно соединенных звеньев, то эквивалентная передаточная функция такой цепочки равна произведению передаточных функций, входящих в эту цепочку.
2. Если звенья соединены параллельно, то эквивалентная передаточная функция такой цепочки равна сумме передаточных функций, входящих в цепочку.
3. Если звено с передаточной функцией W охвачено обратной связью с передаточной функцией W0 , то эквивалентная передаточная функция такой связки определяется как Wэ = W/(1 WW0)
В данной формуле знак + соответствует отрицательной обратной связи, а знак - - положительной.
4. Если через звено с передаточной функцией W перенести точку съема по направлению передачи сигнала, то эквивалентная передаточная функция, которую необходимо включить в цепь съема сигнала должна равняться 1/W. Если же точку съема перенести против направления передачи сигнала, то эквивалентная передаточная функция должна равняться W.
5. При переносе сумматора через звено по направлению передачи сигнала в цепь сигнала необходимо ввести эквивалентное звено, передаточная функция которого должна равняться W, а при переносе против направления передачи сигнала – 1/W.
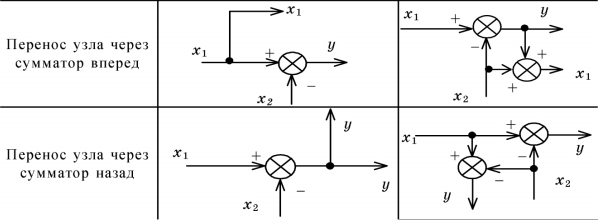
6. Точки съема сигнала и сумматоры можно переставлять друг с другом.
Используя правила структурных преобразований можно структурную схему привести к одноконтурному виду, изображенному на рисунке 5.2.
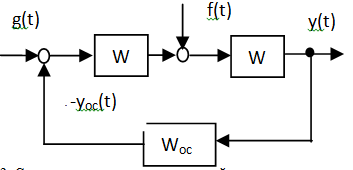
Рис.5.2. Структурная схема одноконтурной системы
На рисунке: g(t) – задающее, f(t) – возмущающее воздействия и y(t) – регулируемая величина.
Передаточные функции разомкнутых и замкнутых систем
По приведенной на рис.5.2 схеме можно определить все передаточные функции системы.
Передаточная функция разомкнутой системы Wp(p) = W1W2Woc = yoc(p)/g(р).
Передаточная функция замкнутой системы по:
задающему воздействию Фg (p) = yg(p)/g(t) = W1W2/(1 + Wp), возмущающему воздействию Фf(p) = yf(p)/f(p) = W2//(1 + Wp), ошибке для задающего воздействия Фg(p) = g(p)/g(p) = 1/(1 + Wp), ошибке для возмущающего воздействия Фf(p) = f(p)/f(p) = W2Woc/(1 + Wp).
Дополнительно
5. Блок-схема замкнутой системы автоматического регулирования, основные элементы и их назначение, принцип работы.
Системы автоматического регулирования являются системами направленного действия, т.е. они обладают детектирующим свойством (направление действия всегда от входа к выходу).
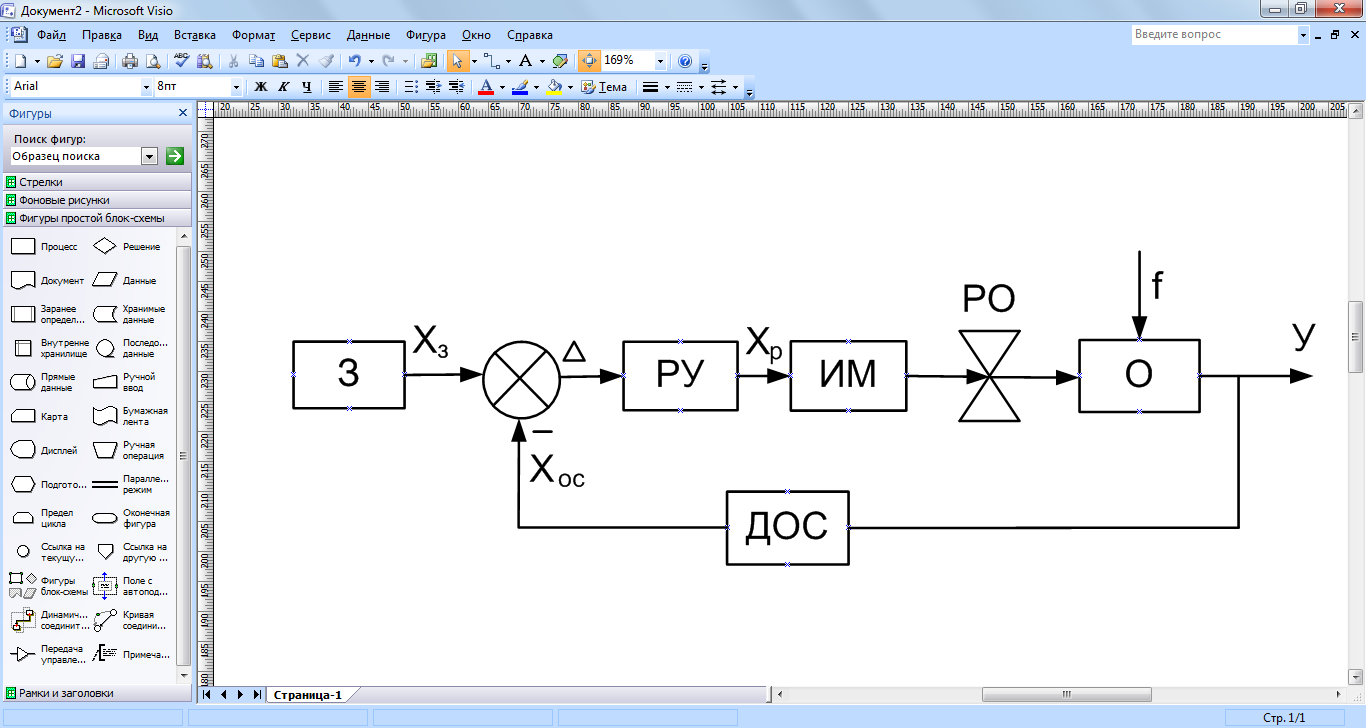
Блок – схема замкнутой САР
Всякая замкнутая САР состоит из следующих элементов:
З — генератор задающих воздействий; служит для задания определенного закона (алгоритма) управления выходной величины; обычно это потенциометры, кулачки, магнитные ленты, проволока, нивелир, луч света и т. п.;
ДОС — датчик обратной связи (чувствительный элемент, первичный преобразователь — датчик); служит для измерения текущего значения регулируемой величины y и преобразования ее в другого рода хос, удобную для технической реализации схемы;
ЭС— элемент сравнения; служит для выявления разницы между заданным и текущим значениями регулируемой величины и формирует полезный сигнал (сигнал ошибки (рассогласования );
РУ - регулирующее устройство; служит для преобразования сигнала, поступающего с элемента сравнения, в такой сигнал, который позволяет придать системе желаемые динамические свойства; для усиления поступающего сигнала до значения, достаточного для приведения в действие исполнительного элемента — ИМ;
ИМ — исполнительный механизм; служит для перемещения регулирующего устройства в направлении компенсации сигнала рассогласования, преобразованного регулятором;
РО — рабочий орган;
О - Объект управления — техническое устройство, преобразующее один вид энергии в другой и совершающее полезную работу.
f – возмущающее воздействие, действующее на О.
Кроме указанных на схеме элементов, в состав системы могут входить местные обратные связи, охватывающие отдельные элементы системы, измерители возмущающих воздействий и т.д.
Возмущающих воздействий, оказывающих влияние на систему управления, может быть множество. Они могут действовать в различных местах системы управления. Однако, учитывая, что в линейных системах управления реакцию системы на ряд воздействий можно определять как сумму реакций на каждое воздействие (принцип суперпозиции), можно для анализа системы использовать одно эквивалентное воздействие, эффект которого равен суммарному эффекту всех воздействий.
Принцип работы:
С генератора задающих воздействий З на элемент сравнения подаётся сравнения подаётся задающий сигнал хз. На элемент сравнения также подаётся сигнал хос с датчика обратной связи ДОС. В результате образуется сигнал рассогласования , подаваемый на регулирующее устройство РУ, которое предназначено для усиления входного сигнала, изменения его по определенному закону и даже, возможно, изменения физической природы входного сигнала. Образующийся сигнал регулирования хр подаётся на исполнительный механизм ИМ, приводящий в движение рабочий орган РО, воздействующий на объект управления О. На данный объект могут воздействовать возмущающие воздействия f. Информация об объекте снимается ДОС и образуемый сигнал хос снимается на элементе сравнения.