

8. Устойчивость, управляемость и наблюдаемость динамических систем (новая редакция) Устойчивость линейных ситем. Необх и дост условие.
с течением времени управл-я велич. возвращается с некоторой точностью в заданное равновесное состояние. Такой переходный процесс назыв. сходящимся, а система устойчивой.
Система не может восстановить равновесное состояние. Управляемая вел-на все больше удал-ся от заданного значения. Такой перех. процесс назыв. расходящимся, а система не устойчивой.
Пограничный между 1и2. В системе возникают незатухающие колебания регулируемой величины. Такой перех. процесс назыв. незатух-им колебат., а система считается находящимся на границе устойчивости.
В системе не возникает переходного процесса. Значение управл. переменной остается на том же уровне при котором оно достигло под действ. возмущения. Это будет нейтрально устойчивая система.
Вывод: Система является устойчивой, если после прекращения внешнего воздействия она по истечении некоторого времени возвращается к тому состоянию равновесия или вынужденного движения, в котором находилась до начала воздействия.
Усл-е Для устойчивости линейной системы необходимо и достаточно, чтобы все корни ее характеристического уравнения имели отрицательную вещественную часть. При наличии хотя бы одного корня с положительной вещественной частью система неустойчива.
наблюдаемость является свойством системы, показывающим, можно ли по выходу полностью восстановить информацию о состояниях системы.
Система
называется наблюдаемой, если на конечном
интервале времени по выходу системы в
конце этого интервала
![]() при известном управляющем воздействии
при известном управляющем воздействии
![]() можно определить все начальные компоненты
вектора состояния '.
можно определить все начальные компоненты
вектора состояния '.
Соответственно наблюдаемыми состояниями системы являются те компоненты вектора состояния, которые можно восстановить по условиям, приведённым выше.
Более формально можно сказать, что наблюдаемость позволяет по выходу системы судить о процессах, происходящих внутри неё. Ввиду того, что состояния системы играют важную роль в управлении с помощью обратных связей, важно, чтобы они были наблюдаемыми.
Управляемость — одно из важнейших свойств системы управления, описывающее возможность перевести систему из одного состояния в другое.
Состояние
![]() линейной системы управляемо, если
существует такой вход
линейной системы управляемо, если
существует такой вход
![]() ,
который переводил бы начальное состояние
,
который переводил бы начальное состояние
![]() в конечное состояние
в конечное состояние
![]() (начало координат) за конечный интервал
времени
(начало координат) за конечный интервал
времени
![]() .
.
Система называется полностью управляемой, если все компоненты её вектора состояний управляемы.
(ВСЮ ОСТАЛЬНУЮ ИНФУ
СМОТРИТЕ В ОТВЕТЕ В 3 ЛИСТА)
9. Непрямые методы оценки качества систем автоматического управления.
Косвенные оценки качества САР
косвенные методы- позволяющие, не решая дифференциального уравнения, определить некоторые показатели качества процесса управления; к ним, в частности, относятся корневые, интегральные и частотные методы.
Оценка качества САУ по расположению корней характеристического уравнения
Рассмотрим характеристическое уравнение САУ:
![]() .(7.6)
.(7.6)
Если
при
![]() имеем
имеем
![]() ,
то ему соответствует составляющая
переходного процесса:
,
то ему соответствует составляющая
переходного процесса:
![]() ,
(7.7)
,
(7.7)
если
есть пара комплексно-сопряженных корней
![]() ,
то для них
,
то для них
![]()
![]() .
(7.8)
.
(7.8)
Как
видно из выражений (7.7) и (7.8), интенсивность
затухания переходного процесса
определяется величиной отрицательной
вещественной части корня. Потребуем,
чтобы все составляющие переходного
процесса за время
![]() уменьшилась не менее чем в
уменьшилась не менее чем в
![]() раз.
раз.
 (7.9)
(7.9)
Поскольку
огибающей составляющей переходного
процесса является экспонента, за которую
кривая не выходит, то, предположив, что
точки
![]() и
и
![]() находятся на ней, получим:
находятся на ней, получим:
![]() .
(7.10)
.
(7.10)
откуда
![]() .
(7.11)
.
(7.11)
Условие
(7.11) указывает на то, что если по модулю
отрицательная часть всех корней
характеристического уравнения (7.6) будет
не менее
![]() ,
т.е. все корни будут располагаться левее
прямой, проведенной на комплексной
плоскости параллельно оси ординат на
расстоянии
,
т.е. все корни будут располагаться левее
прямой, проведенной на комплексной
плоскости параллельно оси ординат на
расстоянии
![]() слева, то каждая составляющая переходного
процесса уменьшается за время
не менее чем в
раз (рисунок 7.1).
слева, то каждая составляющая переходного
процесса уменьшается за время
не менее чем в
раз (рисунок 7.1).
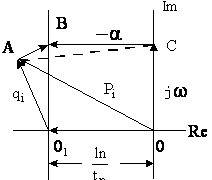
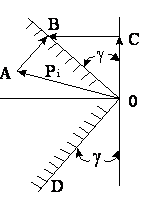
Рисунок 7.1 - Оценка абсолютной
Рисунок 7.2 - Оценка относительной
степени затухания степени затухания
Интегральные оценки качества САУ

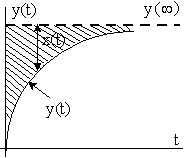
рис. 7.4
Наиболее простым интегральным критерием качества САУ является критерий учитывающий интеграл отклонений регулируемой величины.
![]() ,
(7.19)
,
(7.19)
где
![]() .
Здесь
.
Здесь
![]() - регулируемая величина,
- регулируемая величина,
![]() - установившееся значение регулируемой
величины (рис 7.4). Этим критерием можно
пользоваться только в случае
знакопостоянства
- установившееся значение регулируемой
величины (рис 7.4). Этим критерием можно
пользоваться только в случае
знакопостоянства
![]() .
САУ тем лучше, чем меньше
.
САУ тем лучше, чем меньше
![]() ,
т.е. чем меньше площадь, ограниченная
кривой
и прямой
,
т.е. чем меньше площадь, ограниченная
кривой
и прямой
Вычислить интеграл (7.19) можно двумя способами. В первом способе учитывается то, что является фактически свободной составляющей процесса, поскольку отсчитывается от нового установившегося состояния.
Второй метод вычисления :
Пусть САУ имеет передаточную функцию
 и
и
![]() (7.22)
(7.22)
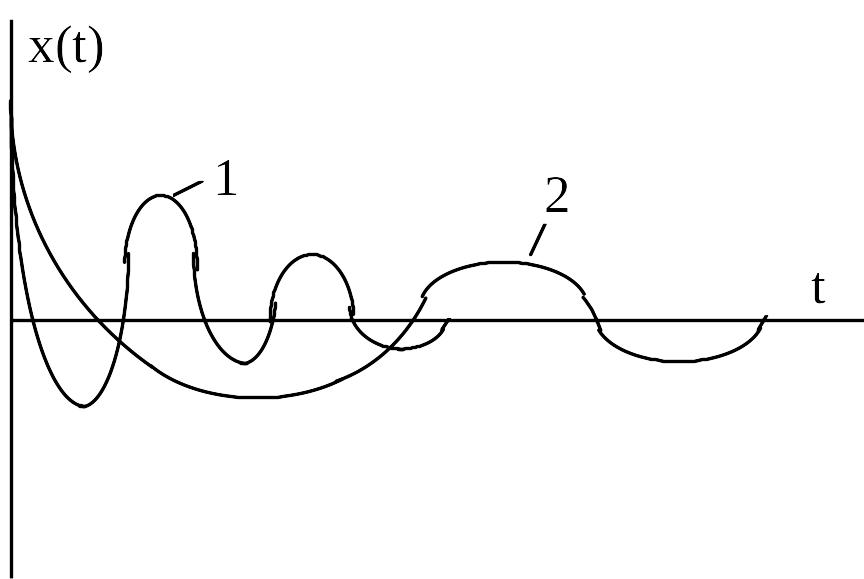
Рисунок 7.5 - Вид колебательных процессов
Интегральный квадратичный критерий качества:
![]() (7.24)
(7.24)
Оценка
качества САУ по
![]() может производиться для случая
колебательных систем (рисунок 7.5). Однако
частота колебаний при этом не учитывается.
Параметры САУ стремятся выбрать так,
чтобы квадратичная оценка
приняла минимальное значение. Для этой
цели выражают
может производиться для случая
колебательных систем (рисунок 7.5). Однако
частота колебаний при этом не учитывается.
Параметры САУ стремятся выбрать так,
чтобы квадратичная оценка
приняла минимальное значение. Для этой
цели выражают
![]() через эти параметры и затем ищут их
значения, минимизирующие значения
из уравнений:
через эти параметры и затем ищут их
значения, минимизирующие значения
из уравнений:
![]() ;
;
![]() ,
,
![]() ,где
,где
![]() ,
,
![]() ,
- варьируемые параметры.
,
- варьируемые параметры.
Лишен недостатка, присущего , улучшенный квадратичный критерий качества:
![]() ,
(7.25)
,
(7.25)
где
![]() - некоторая постоянная времени, учитывающая
долю влияния скорости изменения
регулируемой величины на
- некоторая постоянная времени, учитывающая
долю влияния скорости изменения
регулируемой величины на
![]() .
.
При
![]() получаем обычный квадратичный критерий
качества.
получаем обычный квадратичный критерий
качества.
Оценка качества САУ по частотным характеристикам
Рассматривая
запас устойчивости САУ по модулю и фазе,
было установлено, что они определяются
расположением на комплексной плоскости
АФХ разомкнутой системы. Для обеспечения
соответствующих параметров (запаса
устойчивости по модулю и фазе) необходимо,
чтобы АФХ разомкнутой САУ не заходила
в определенную зону на комплексной
плоскости
(рисунок
7.6).

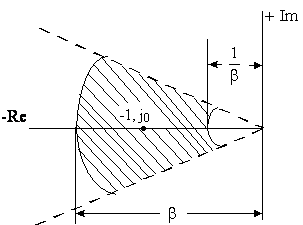
Рисунок 7.6 - Запретная зона для АФХ разомкнутой САУ
Способы улучшения качества САУ
Основным требованием к системе автоматического управления является ее устойчивость, а также количественные показатели, характеризующие динамику переходных процессов и установившееся движение системы, т.е. показатели качества ее функционирования.
Введение производной в закон регулирования
Введение интеграла в закон регулирования
Создание инвариантных САУ
Создание комбинированных САУ САР.
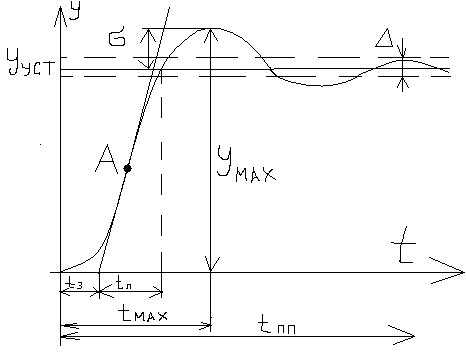
(А – точка перегиба) Показатели: y(max) – макс значение переходной функции а перех процессе, t(max) –время достижения первого макс, y(уст) – установившиеся значение вых координаты после окончания перех процесса, σ - перерегулирование σ = y(max)-y(уст) σ%=( y(max)-y(уст) )/ y(уст)*100%, t(н) – время нарастания, t(з)- время задержки, ν – число колебаний в перех процессе, Δ – трубка точности (5%), t(пп) – время перех процесса.
Перех процесс считают законченным, когда выходн координата в последний раз вошла в трубку точности и не вышла из нее.