

15. Основные способы формирования математических моделей динамических объектов
Динамический объект (от дина - сила, т.е. объект, воспринимающий силу, воздействие) это физическое тело, техническое устройство или процесс, имеющее входы, точки возможного приложения внешних воздействий, и воспринимающие эти воздействия, и выходы, точки, значения физических величин в которых характеризуют состояние объекта. Объект способен реагировать на внешние воздействия изменением своего внутреннего состояния и выходных величин, характеризующих его состояние. И воздействие на объект, и его реакция в общем случае изменяются с течением времени, они наблюдаемы, т.е. могут быть измерены соответствующими приборами. Объект имеет внутреннюю структуру, состоящую из взаимодействующих динамических элементов.
Динамический объект математически описывается дифф урм как целое.
Поэтому его свойства это его характерное поведение под влиянием внешних воздействий, то, как изменяется выходной сигнал с течением времени.
16. Дифференциальная форма математических моделей, передаточная функция. Передаточные функции разомкнутых и замкнутых систем
Передаточная функция — один из способов математического описания динамической системы. Используется в основном в теории управления, связи, цифровой обработке сигналов. Представляет собой дифференциальный оператор, выражающий связь между входом и выходом линейной инвариантной во времени системы. Зная входной сигнал системы и передаточную функцию, можно восстановить выходной сигнал.
В теории управления передаточная функция непрерывной системы представляет собой отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа входного сигнала при нулевых начальных условиях.
Пусть u(t) — входной сигнал линейной стационарной системы, а y(t) — её выходной сигнал. Тогда передаточная функция W(s) такой системы записывается в виде:
![]() ,
,
где U(s) и Y(s) — преобразования Лапласа для сигналов u(t) и y(t) соответственно
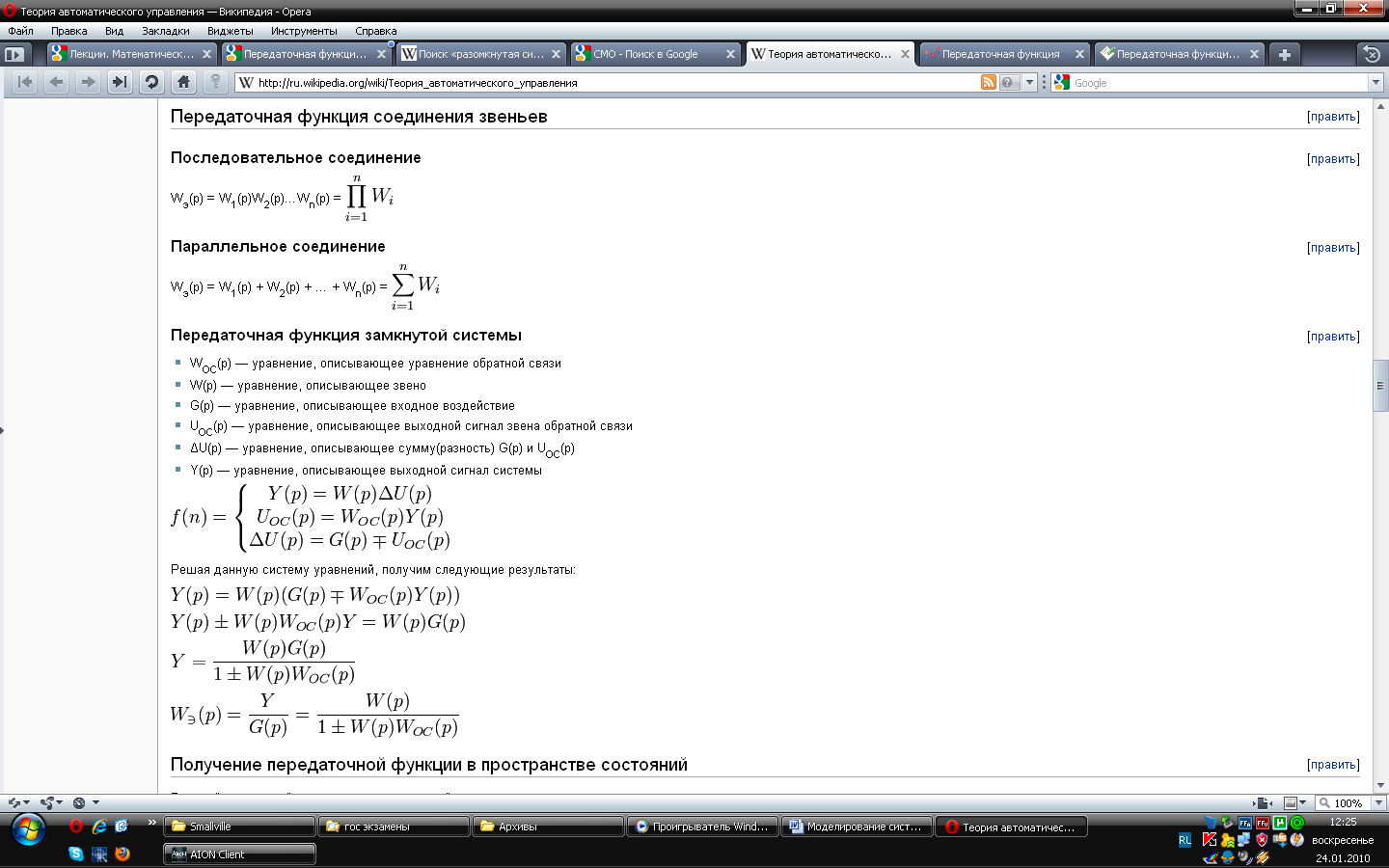
Передаточная функция замкнутой системы.
Wос(р)-уравнение обратной связи
W(р)-уравнение, описывающее звено
G(р)-уравнение, описывающее входное
Воздействие
Uос(р)-уравнение, описывающее входной сигнал звена обратной связи
Передаточная функция разомкнутой САУ первого порядка имеет вид
![]()
Характеристическое уравнение разомкнутой системы представляется в виде
Tp+1+K=0 ,
откуда следует , что при любых положительных значениях Т, К замкнутая система устойчива.
Проведем аналогичное рассмотрение для системы второго порядка. Передаточная функция разомкнутой системы имеет вид
![]()
Характеристическое уравнение замкнутой системы можно представить в виде
![]()
При Т1>0 ,T2>0 , K>0 все коэффициенты положительны , что для систем 2-ого порядка является необходимым и достаточным условием устойчивости .