

14.(18) Критерий статической устойчивости двухмашинной эс.
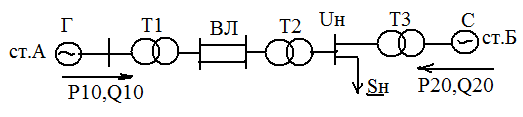
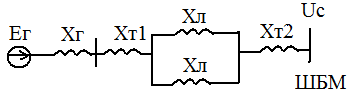
Статическая устойчивость – это способность системы восстанавливать исходный режим после малого его возмущения или режим, весьма близкий к исходному (если возмущающее воздействие не снято). Однолинейная схема двухмашинной энергосистемы:

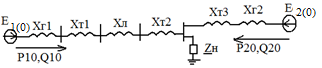
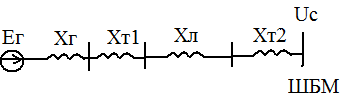
Электрическая схема замещения:


Угловая
характеристика электромагнитных
мощностей станций А и Б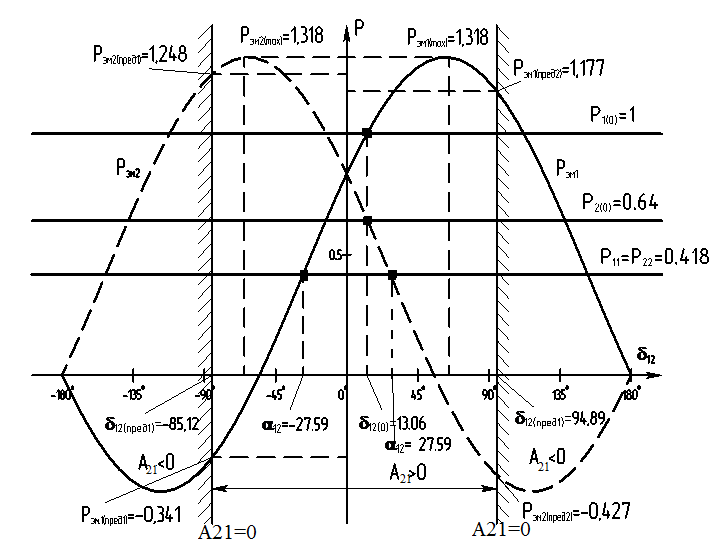
Угол
рассогласования между векторами
переходных ЭДС

 -
совместный режим работы двух станций
-
совместный режим работы двух станций
Удельное относительное ускорение ротора генератора 2-ой станции по отношению к 1-ой
 -
Область устойчивой работы машин
-
Область устойчивой работы машин
15.(2)Понятие о динамической устойчивости эс.
Динамическая устойчивость - способность электрической системы восстанавливать после большого возмущения исходное состояние или состояние, практически близкое к исходному (допустимому по условиям эксплуатации).
Схема
замещения электропередачи в нормальном
режиме (до отключения цепи). Индуктивное
сопротивление системы
 .
Амплитуда хар-ки мощности
.
Амплитуда хар-ки мощности
 .
При отключении одной цепи линии
.
При отключении одной цепи линии
 .
.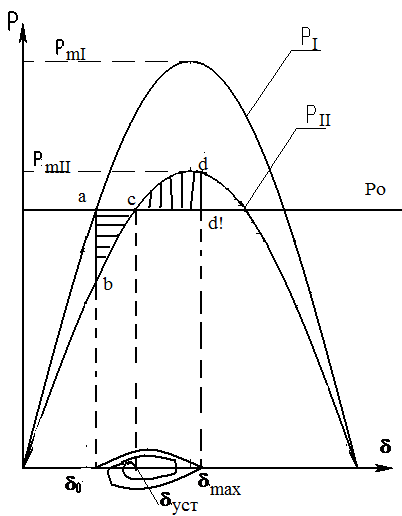
Режим
работы, предшествовавший отключению
цепи, определяется (.) а на хар-ке мощности
PI
нормального режима при передаваемой
мощности Ро и угле
 .
После отключения этому режиму соответствует
новая хар-ка мощности PII,
(.) b
(при том же значении угла
.
После отключения этому режиму соответствует
новая хар-ка мощности PII,
(.) b
(при том же значении угла
 )
будет определять режим в момент
отключения цепи. Т.о, в момент отключения
цепи режим работы изменяется и
характеризуется (.) b
на новой хар-ке, что обуславливает
внезапное уменьшение Рг. Ро=const.
Неравенство мощностей, a
следовательно, и моментов на валу Т и Г
вызывает появление избыточного
момента,
под влиянием кот-го агрегат Т-Г начинает
ускоряться. Связанный с ротором генератора
вектор ЭДС начинает вращаться быстрее,
чем вращающийся с неизменной синхронной
угловой скоростью
)
будет определять режим в момент
отключения цепи. Т.о, в момент отключения
цепи режим работы изменяется и
характеризуется (.) b
на новой хар-ке, что обуславливает
внезапное уменьшение Рг. Ро=const.
Неравенство мощностей, a
следовательно, и моментов на валу Т и Г
вызывает появление избыточного
момента,
под влиянием кот-го агрегат Т-Г начинает
ускоряться. Связанный с ротором генератора
вектор ЭДС начинает вращаться быстрее,
чем вращающийся с неизменной синхронной
угловой скоростью
 вектор
напряжения шин приемной системы.
Возникновение относительной скорости
вращения Vот
приводит к
вектор
напряжения шин приемной системы.
Возникновение относительной скорости
вращения Vот
приводит к
 и на хар-ки мощности рабочая точка
перемещается к т.с. При этом Рг начинает
возрастать. В т. с Рт и Рг уравновешивают
друг друга и избыточный момент равен
нулю При дальнейшем росте угла Рг уже
превышает Рт и избыточный момент изменяет
свой знак и ротор начинает тормозиться.
В т.d
относительная скорость вращения
становится=0. Это означает, что в этой
точке эдс вращается с той же угловой
скоростью что и вектор напряжения, и
угол между ними больше не возрастает
относительное перемещение ротора
прекратится, и т.к в этой точке имеется
избыточный тормозящий момент, начинается
относительное движение ротора в обратном
направлении. Пройдя по инерции т.с и
достигнув минимального угла отклонения,
ротор останавливается в своем относительном
движении и затем снова начинает
ускоряться. После нескольких колебаний
с постепенно затухающей амплитудой
относительное движение ротора прекратится
и его положение будет определяться т.с,
являющейся точкой установившегося
режима на новой хар-ки мощности.(Если
бы ротор при первом отклонении прошел
угол бкр., то избыточный момент вновь
изменил свой знак и сделался снова
ускоряющимся. С дальнейшим ростом угла
б ускоряющий момент стал бы увеличиваться
и Г выпал бы из синхронизма. Итак, можно
констатировать, несмотря на теоритическую
возможность существования нового
установившегося режима в т.с, процесс
качения машины при переходе к этому
режиму может привести к выпадению машины
из синхронизма. Такой характер нарушения
устойчивости может быть назван
динамическим.
и на хар-ки мощности рабочая точка
перемещается к т.с. При этом Рг начинает
возрастать. В т. с Рт и Рг уравновешивают
друг друга и избыточный момент равен
нулю При дальнейшем росте угла Рг уже
превышает Рт и избыточный момент изменяет
свой знак и ротор начинает тормозиться.
В т.d
относительная скорость вращения
становится=0. Это означает, что в этой
точке эдс вращается с той же угловой
скоростью что и вектор напряжения, и
угол между ними больше не возрастает
относительное перемещение ротора
прекратится, и т.к в этой точке имеется
избыточный тормозящий момент, начинается
относительное движение ротора в обратном
направлении. Пройдя по инерции т.с и
достигнув минимального угла отклонения,
ротор останавливается в своем относительном
движении и затем снова начинает
ускоряться. После нескольких колебаний
с постепенно затухающей амплитудой
относительное движение ротора прекратится
и его положение будет определяться т.с,
являющейся точкой установившегося
режима на новой хар-ки мощности.(Если
бы ротор при первом отклонении прошел
угол бкр., то избыточный момент вновь
изменил свой знак и сделался снова
ускоряющимся. С дальнейшим ростом угла
б ускоряющий момент стал бы увеличиваться
и Г выпал бы из синхронизма. Итак, можно
констатировать, несмотря на теоритическую
возможность существования нового
установившегося режима в т.с, процесс
качения машины при переходе к этому
режиму может привести к выпадению машины
из синхронизма. Такой характер нарушения
устойчивости может быть назван
динамическим.