

4. (4) Уравнение движения ротора генератора в различных формах
 - Основное уравнение движения ротора
генератора, где все составляющие
представлены в системе относительных
единиц:
- Основное уравнение движения ротора
генератора, где все составляющие
представлены в системе относительных
единиц:
В практических расчетах это уравнение используется и в других формах, различающихся тем, что некоторые или все его составляющие выражены в именованных единицах
|
Уравнение ротора генератора |
Tj |
t |
|
P |
|
|
Рад |
Рад |
Рад |
О.е. |
|
|
С |
Рад |
Рад
|
О.е. |
|
|
С |
С |
Рад |
О.е. |
|
|
С |
С |
Эл. град |
О.е. |
|
|
с |
С |
Эл. град |
КВт |






где
 -
постоянная
инерции ротора (вращающейся
части агрегата), имеющая размерность
времени и численно равная промежутку
времени, в течение которого ротор
разгоняется из состояния покоя до
номинальной скорости вращения под
действием номинального вращающего
момента.
-
постоянная
инерции ротора (вращающейся
части агрегата), имеющая размерность
времени и численно равная промежутку
времени, в течение которого ротор
разгоняется из состояния покоя до
номинальной скорости вращения под
действием номинального вращающего
момента.
f0=50 Гц,
 рад/c,
рад/c,
Sб – базисная мощность,
P [отн.ед] =P[кВт] /Sб[кВА]
5. (7) Понятие о статической устойчивости простейшей энергосистемы
Статическая устойчивость – способность системы восстанавливать исходное состояние после малых возмущений или состояние близкое к исходному если возмущающее воздействие не снято.
Для рассмотрения понятия о статической устойчивости требуется графическое представление отрезка функции Р(δ) в пределах положительного полупериода синусоиды.

 -
характеристика изменения передаваемой
мощности в функции от угла.
-
характеристика изменения передаваемой
мощности в функции от угла.
В
любой точке восходящей ветви угловой
характеристики случайно возникающий
небаланс мощности
 и
соответствующее ему приращение угла
и
соответствующее ему приращение угла
 имеют
одинаковые знаки, их отношение положительно
и может рассматриваться как формальный
признак устойчивости
имеют
одинаковые знаки, их отношение положительно
и может рассматриваться как формальный
признак устойчивости
 (система
статически устойчива)
(система
статически устойчива)
При
переходе к бесконечно малым приращениям
этот признак записывается в виде
 (система
статически неустойчива),
(система
статически неустойчива),
Предельному
по условиям статической устойчивости
режиму
энергосистемы соответствует равенство

На
случай появления непредвиденных
возмущений предусматривается запас по
загрузке генератора, характеризуемый
коэффициентом
запаса статической устойчивости
 .
.
В
нормальных режимах энергосистем должен
обеспечиваться запас, соответствующий
коэффициенту Кст 20%,
в наиболее тяжлых
режимах, при которых увеличение перетоков
мощности по линиям позволяет уменьшить
ограничения потребителей или потери
гидроресурсов, допускается снижение
запаса по устойчивости до Кст
20%,
в наиболее тяжлых
режимах, при которых увеличение перетоков
мощности по линиям позволяет уменьшить
ограничения потребителей или потери
гидроресурсов, допускается снижение
запаса по устойчивости до Кст 8%,
в кратковременных
послеаварийных режимах также должен
обеспечиваться запас Кст
8%,
в кратковременных
послеаварийных режимах также должен
обеспечиваться запас Кст 8%(послеаварийные
режимы длительностью до 40 минут, в
течение которых диспетчер должен
восстановить нормальный запас по
статической устойчивости)
8%(послеаварийные
режимы длительностью до 40 минут, в
течение которых диспетчер должен
восстановить нормальный запас по
статической устойчивости)
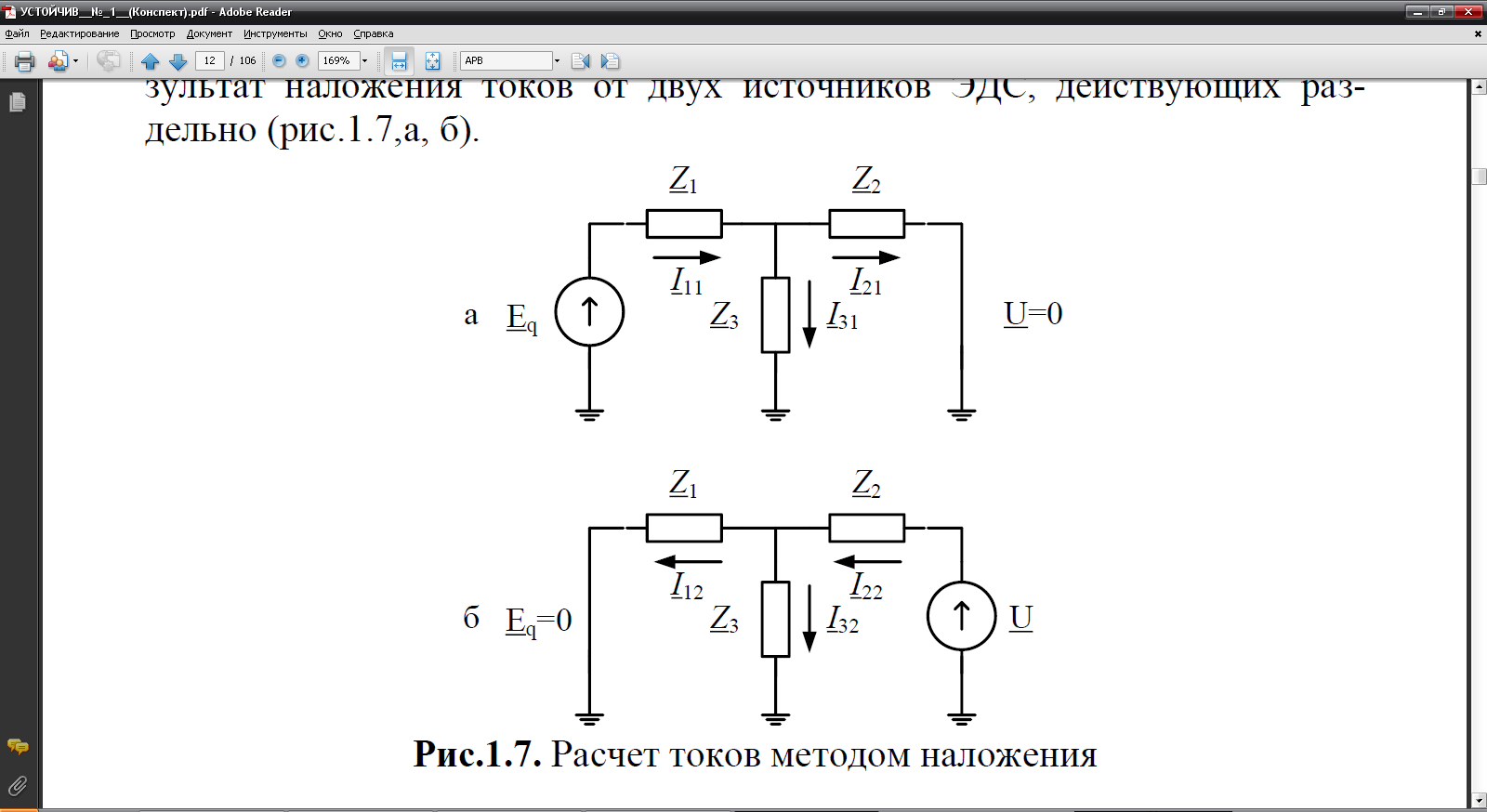
6. Определение собственных и взаимных сопротивлений и проводимостей при сложной связи между двумя генераторными станциями
Одним из широко распространѐнных способов математического описания пассивных частей схем замещения является их представление в форме обобщѐнных параметров, используемых при расчѐтах режимов простых и сложных энергосистем. Рассмотрим основные принципы определения этих параметров:
1. Насколько бы ни была сложна пассивная часть схемы замещения, еѐ всегда можно преобразовать к Т-образному или П-образному виду
В
соответствии с принятыми положительными
направлениями искомые токи I1,
I2
в трѐхфазной схеме будут определены
как

 ,где:
,где:


В
этих выражениях обобщѐнные параметры
обозначены как:
 ,
,
и
 ,
, - соответственно собственные сопротивления
и собственные проводимости схемы
относительно узлов 1 и 2.
- соответственно собственные сопротивления
и собственные проводимости схемы
относительно узлов 1 и 2.
 ,
, -
взаимное сопротивление и проводимость
схемы между узлами 1 и 2 .
-
взаимное сопротивление и проводимость
схемы между узлами 1 и 2 .
Собственное сопротивление каждой ветви с источником ЭДС определяет величину тока в этой ветви при нулевом значении ЭДС другого источника.
Собственные сопротивления вычисляются как эквивалентные сопротивления пассивной части относительно зажимов источников ЭДС по правилам параллельного и последовательного сложения:


Взаимное сопротивление определяет величину тока в ветви с источником ЭДС при нулевом значении этой ЭДС под действием ЭДС другого источника.
Взаимные сопротивления и одинаковы. Они вычисляются по формуле преобразования звезды в эквивалентный треугольник:
