

25. (26) Условия успешной синхронизации генераторов.
Под синхронизацией понимается завершающая стадия пуска и подключения СМ на параллельную работу с СМ в ЭС. Маломощные синхронные двигатели подключаются к электрической сети без дополнительных устройств и дополнительной подготовки, то есть для них осуществляется прямой пуск, завершающийся самосинхронизацией двигателя с U электрической сети. Для синхронных электродвигателей средней и большой мощности используется, асинхронный пуск, когда двигатель запускается без возбуждения, а в конечной стадии когда подаѐтся возбуждение, осуществляется самосинхронизация двигателя с Uэлектрической сети.
Для синхронных генераторов средней и большой мощности применяется способ точной синхронизации.
При точной синхронизации выполняется условие: Uг=Uс;Это ограничивает величину начального уравнительного тока и уменьшает интенсивность электродинамического воздействия на фазные обмотки генератора.
С
этой же целью вводится ограничение на
величину угла Δδ
между векторами напряжения Uг
и Uс
условие:
 ,
с тем, чтобы величина Iуравн,
не оказалась выше тока трѐхфазного КЗ,
на которую рассчитана механическая
прочность обмоток генератора. При
значении угла Δδ
= 60°
разность векторов ΔU
= Uг-Uc
по модулю будет равна напряжению Uг
и, соответственно, уравнительный ток
будет сопоставим с током трѐхфазного
КЗ.
,
с тем, чтобы величина Iуравн,
не оказалась выше тока трѐхфазного КЗ,
на которую рассчитана механическая
прочность обмоток генератора. При
значении угла Δδ
= 60°
разность векторов ΔU
= Uг-Uc
по модулю будет равна напряжению Uг
и, соответственно, уравнительный ток
будет сопоставим с током трѐхфазного
КЗ. 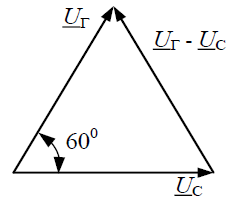
Если в момент включения вектора Uг и Uс окажутся в противофазе (Δδ = 180°), то величина уравнительного тока может вдвое превысить величину тока трѐхфазного КЗ.
При
включении выключателя с ненулевой
относительной скоростью Vвкл=
ωг - ωс ротор генератора в момент включения
будет иметь некоторую дополнительную
к основной кинетическую энергию
относительного движения Квкл:
 ,
которая при большой еѐ величине, не
позволит генератору войти в синхронный
режим. Для успешности перехода к
синхронной работе необходимо, чтобы
кинетическая энергия Квкл уже на первом
цикле качаний ротора генератора полностью
преобразовалась в потенциальную энергию.
,
которая при большой еѐ величине, не
позволит генератору войти в синхронный
режим. Для успешности перехода к
синхронной работе необходимо, чтобы
кинетическая энергия Квкл уже на первом
цикле качаний ротора генератора полностью
преобразовалась в потенциальную энергию.

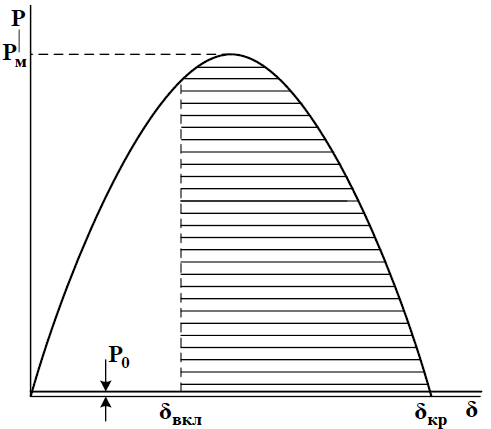
Условие обеспечения ДУ синхронного генератора при подключении его к электрической сети может быть представлено как:
26.(7)Правило площадей при анализе ду двухмашинной энергосистемы.
В
начальный момент короткого замыкания
ротор генератора в силу инерции сохраняет
угол относительно синхронно вращающейся
оси, а электромагнитная мощность падает
до величины, ограниченной точкой b.
На валу ротора возникает избыточный
ускоряющий момент, под действием которого
увеличивается относительная скорость,
и возрастает угол . Если повреждѐнная
цепь не отключится, то генератор выпадет
из синхронизма. Однако через некоторое
время δ (при ) релейная защита отключает
повреждѐнную
цепь, и электрическая на- грузка на
генератор скачком (от точки с
до
точки ) возрастает всвязи с переходом
на послеаварийную характеристику. На
валу ротора появляется избыточный
тормозящий момент, под действием которого
его движение замедляется. Торможение
ротора происходит до тех пор, пока
дополнительная кинетическая энергия,
приобретѐнная
до момента отключения повреждѐнной
цепи, не преобразуется в потенциальную
откл δ δ с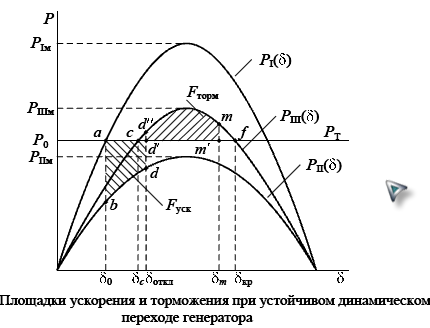
Поскольку площадь на плоскости в некоторой пропорции отражает энергию (или работу), то в соответствии с законом сохранения количества энергии следует, что площадка ( ), соответствующая торможению, должна быть равна площадке ( ), со- ответствующей ускорению ротора генератора. (δ)
Равенство между площадками торможения и ускорения
Отношение площади возможного торможения к площади ускорения представляет собой коэффициент запаса динамической устой чивости:
возм.торм д.у уск F K F Критерием динамической устойчивости простейшей энергосистемы, очевидно, будет Kду>=1
Последнее неравенство означает, что для сохранения динамической устойчивости одномашинной энергосистемы необходимо и достаточно, чтобы площадь возможного торможения была больше или равна площади ускорения.