

12.(25) Причины появления самораскачивания роторов генераторов энергосистемы.
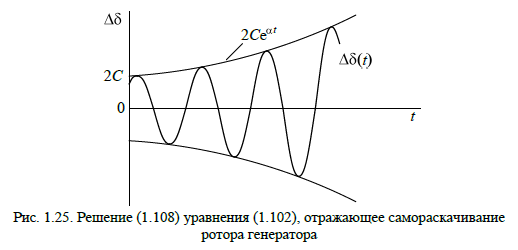
Самораскачивание-это вид электромеханической неустойчивости генератора, когда его ротор совершает колебательные движения относительно основной скорости (синхронной) с увеличивающейся амплитудой вплоть до выпадения из синхронизма.
3 основные причины появления самораскачивания:
1)Большое активное сопр-е в статорной цепи генератора r/x>0.5 При увеличении активного сопр-я цепи статора демпферный коэф-т уменьшается и при некотором знач становится «-», что явл условием возмож появления самораскачивания генератора.

2)Наличие зоны нечувствительности явл свойством систем АРВ элмех типа, кот-е на современных СМ практически не применяются. Запаздывание в прохождении сигнала от момента изменения параметра регулирования до момента изменения ЭДС обусловлено электромагнитной инерционностью элементов АРВ и обмотки возбуждения, свойственной всем СГ. При работе генератора в области искусственной устойчивости колебательный процесс будет определяться отрицательным наклоном внутренних характеристик, зоной нечувствительности, запаздыванием, энергетическими соотношениями ускорения-торможения и демпфированием колебаний ротора.
3)Неправильная настройка АРВ
Типичным
примером неправильной настройки АРВ
СД является случай, когда чрезмерно
увеличен коэф-т усиления по отклонению
напряжения k0U,
а коэф-ы усиления по производным (коэф-ы
каналов стабилизации) находятся вне
области устойчивости. В этом случае
самораскачивание может возникнуть не
только в зоне искусственной устойчивости,
но и в других режимах, даже при очень
малой загрузке генераторов. 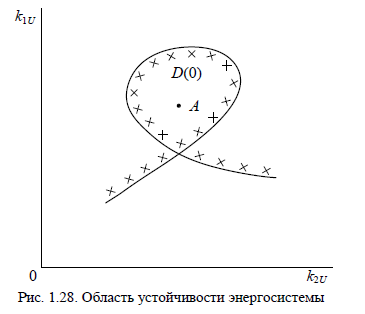
Область устойчивости D(0) , построенная на плоскости коэф-ов усиления по первой k1U и второй k2U производным напряжения генератора (рис.1.28), ограничена некоторой кривой, называемой границей области устойчивости. Устойчивая работа генератора возможна лишь в том случае, когда значения коэф-в усиления определяют точку внутри этой области (например, точку A).
Рис. 1.28. Область устойчивости энергосистемы
13.(10) Понятие о синхронной оси. Абсолютное и относительное движение роторов генераторов.
Ротор
синхронной машины представляет собой
вращающееся тело, и поэтому к нему
применимы законы механики, которым
подчиняется вращательное движение.
Если к телу приложить вращающий момент
 ,
то оно получит ускорение
,
то оно получит ускорение
 .
.
 где
где
 -
момент инерции вращающегося тела, в
данном случае агрегата “турбина -
ротор”. В рабочем состоянии ротор
генератора находится под действием
двух основных моментов: вращающего,
обусловленного действием энергоносителя
на турбину и тормозящего,
обусловленного воздействием
электромагнитных сил, возникающих от
тока нагрузки. Поэтому можно записать
уравнение:
-
момент инерции вращающегося тела, в
данном случае агрегата “турбина -
ротор”. В рабочем состоянии ротор
генератора находится под действием
двух основных моментов: вращающего,
обусловленного действием энергоносителя
на турбину и тормозящего,
обусловленного воздействием
электромагнитных сил, возникающих от
тока нагрузки. Поэтому можно записать
уравнение: где
где
 -
вращающий момент турбины;
-
вращающий момент турбины; -
электромагнитный тормозной момент,
обусловленный нагрузкой.
Угловое
ускорение
-
электромагнитный тормозной момент,
обусловленный нагрузкой.
Угловое
ускорение
 может быть выражено через вторую
производную угла поворота ротора
может быть выражено через вторую
производную угла поворота ротора
 по времени:
по времени:
 .
Получим уравнение движения ротора :
.
Получим уравнение движения ротора : .
Однако такое уравнение движения
ротора генератора несколько неудобно
для электроэнергетических расчетов,
поскольку при его
.
Однако такое уравнение движения
ротора генератора несколько неудобно
для электроэнергетических расчетов,
поскольку при его
 :
: или
или
 ,где
,где
 -
постоянная инерции ротора, численно
равная времени, в течение которого ротор
разгоняется d-магнитная
ось ротора
из
состояния покоя до номинальной скорости
под действием номинального вращающего
момента при постоянном моменте
сопротивления; Следует иметь в виду,
что угол
-
постоянная инерции ротора, численно
равная времени, в течение которого ротор
разгоняется d-магнитная
ось ротора
из
состояния покоя до номинальной скорости
под действием номинального вращающего
момента при постоянном моменте
сопротивления; Следует иметь в виду,
что угол
 отсчитывается от неподвижной оси,
называемой осью отсчета.
Однако
более удобно измерять угловое положение
ротора, его скорость и ускорение не
относительно неподвижной оси, а
относительно оси, вращающейся с синхронной
скоростью
отсчитывается от неподвижной оси,
называемой осью отсчета.
Однако
более удобно измерять угловое положение
ротора, его скорость и ускорение не
относительно неподвижной оси, а
относительно оси, вращающейся с синхронной
скоростью
 .
.
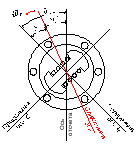
Угол
 (
б-с точки зрения устойчивости это угол
относительно синхронно вращающейся
оси)
между синхронной вращающейся
осью и поперечной осью ротора, скорость
и ускорение изменения этого угла
определяются как
(
б-с точки зрения устойчивости это угол
относительно синхронно вращающейся
оси)
между синхронной вращающейся
осью и поперечной осью ротора, скорость
и ускорение изменения этого угла
определяются как ;
;
 ;
;
 .С
учетом этих соотношений уравнение
движения ротора принимает окончательный
вид:
.С
учетом этих соотношений уравнение
движения ротора принимает окончательный
вид:
 .В
этом уравнении
.В
этом уравнении
 выражены
в радианах, а
выражены
в радианах, а
 и
и
 -
в относительных единицах.
-
в относительных единицах.
Переходные электромагнитные процессы в генераторах сопровождаются изменениями отдаваемой Г мощности, благодаря чему нарушается равновесие между моментом, развиваемым первичным двигателем, с одной стороны, и генераторами, с другой. В результате этого возникает относительное перемещение ротора, отражаемое изменением угла б. Относительное перемещение роторов связанно с отклонением их частоты вращения от синхронной) При относительном перемещении ротора в его обмотках наводятся токи, налагающиеся на систему токов, вызванных первоначальным изменением режима работы генератора. Эти дополнительные токи обуславливают дополнительные колебания мощности генератора.