

2.3. Порядок подготовки устройства управления к работе
1. Привести органы управления в исходное положение. Исходному положению кнопок соответствует их отжатое состояние. Исходному состоянию программного переключателя НОМЕР ПРОГРАММЫ - нулевое положение.
2. Включить систему управления нажатием кнопки ВКЛ.
3. Нажать две кнопки в узле коммутации, которые обеспечивают работу манипулятора в данном варианте компоновки.
Нажатие одной из них соответствует варианту компоновки с зависимым положением захватного устройства. Нажатие другой имитирует срабатывание датчиков положения модуля поворота правого исполнительного устройства. Управление поворотом манипулятора осуществляется органами управления левого захватного устройства.
4. Нажать кнопку КОНТР. БАТ. Проверить наличие питания ЗУ по загоранию лампочки.
2.4. Порядок работы оператора в режиме обучения
1. Нажать кнопку ВКЛЮЧЕНИЕ ИНДИКАЦИИ.
2. При нажатой кнопке СТИРАНИЕ нажать и отпустить кнопку записи.
3. Установить переключатель НОМЕР ПРОГРАММЫ в положение I.
4. Нажать кнопку обучения.
5. Вывести манипулятор в исходную точку.
6. Записать координаты исходной точки, для чего при нажатой кнопке начала программы нажать и отпустить кнопку запись.
7. Записать при необходимости время выдержки манипулятора в точке, нажимая кнопку ТАЙМЕР. Масштаб таймера задается оператором в автоматическом режиме.
8. Записать координаты промежуточных точек, выводя манипулятор в эти точки И нажимая кнопку запись.
9


 .
Вывести манипулятор в конечную точку,
которая должна соответствовать начальной.
Записать ее, нажав и отпустив кнопку
запись, при нажатой кнопке конца программы
.
Вывести манипулятор в конечную точку,
которая должна соответствовать начальной.
Записать ее, нажав и отпустив кнопку
запись, при нажатой кнопке конца программы
2.5. Пример программирования
Пусть манипулятору необходимо перенести деталь из точки А в точку Б. Используем для этой операции левое захватное устройство. В исходном состоянии левое захватное устройство открыто и находится в точке Б.
На рисунке показана последовательность перемещений манипулятора (вид сверху), а в таблице - вариант программы I, записываемой в запоминающее устройство системы управления.
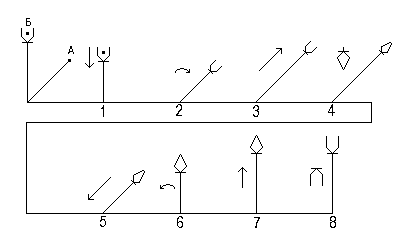
Рис. Последовательность перемещения манипулятора
|
№ команды |
Символика перемещений |
Комментарий |
|
|
|
Перемещение ИУ назад |
|
|
|
Поворот ИУ по часовой стрелке |
|
|
|
Выдвижение ИУ вперед . |
|
|
|
Захватное устройство закрыто |
|
|
|
Перемещение ИУ назад |
|
|
|
Поворот ИУ против часовой стрелки |
|
|
|
Выдвижение ИУ вперед |
|
|
|
Захватное устройство открыто |
 I
I 2
2
 3
3



 4
4 5
5

 6
6

 7
7
 8
8
3. Задание на работу
3.1. Ознакомиться с методическими указаниями к лабораторной работе, визуально освоить устройства управления. Осмотреть пульт управления. Точно знать функциональное назначение каждой кнопки и клавиши и изображения табло пульта управления.
3.2. Внешне осмотреть робот РФ-202М. Усвоить направления перемещения звеньев манипулятора (передвигая их вручную).
3.3. Отчитаться перед преподавателем о знаниях функционального назначения управляющих органов пульта.
3.4. Подготовить в соответствии с пунктом 2.3 устройство к работе в режиме обучения.
3.5. Записать программу I в модуль памяти в соответствии с пунктом 2.4.
3.6. Составить программу 2 переноса детали с выдержкой 3.5 в точке 2 программы I.
3.7. Записать программу 2 в модуль памяти.
3.8. Проверить работу программ I и 2 в режиме обучения.
3.9 Перейти к работе в автоматическом режиме:
-



 установить масштаб таймера кнопкой
;
установить масштаб таймера кнопкой
;
-


 нажать кнопку автоматической работы
;
нажать кнопку автоматической работы
;
- нажать кнопку ПУСК;
- для прерывания программы нажать кнопку СТОП.
3.10. Составить программу 3 синхронного переноса деталей двумя захватными устройствами в соответствии с программой I.
3.11. Записать программу 3 в модуль памяти в режиме обучения.
3.12. Составить программу 4, которая отличается от программы 3 введением временной задержки длительностью 9 с. в точке 6 программы I.
3.13 Записать программу 4 в модуль памяти в режиме обучения.
3.14. Проверить работу программы 3 и 4 в автоматическом режиме в соответствии с п. 3.9.
3.15. Оформить отчет по работе.