

4. Отчет о работе
Отчет должен содержать:
1. Задание на работу.
2. Примерную схему c обозначением отработанных точек и траекторий прохождения исполнительного органа ПР между ними.
3. Порядок программирования на УПМ-772.
4. Анализ результатов и выводы.
5. Ответы на контрольные вопросы.
5. Контрольные вопросы
1. Каковые основные особенности, ПР с позиционным управлением?
2. По кинематической схеме ПР ТУР-10, представленной на рис. I, нарисовать рабочую зону робота в 3-х проекциях.
3. Какими параметрами кинематической схемы робота определяются размеры и форма его рабочей зоны?
4. Описать состав кадра программы позиционного управления.
5. Каковы особенности обучения робота с системой позиционного управления?
6. Каковы достоинства и недостатки программирования с помощью устройства УПМ-772?
Библиографический список
1. Устройство числового программного управления УПМ-772 /Техническое описание и инструкция по эксплуатации. - Ленинград: ЦКБ, 1975. - 148 с.
ЛАБОРАТОРНАЯ РАБОТА № 7
ПРОМЫШЛЕННЫЙ РОБОТ РБ-242.
УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ РОБОТА
Цель и задачи работы
Цель работы: приобретение навыков программирования и управления промышленным роботом РБ-242.
Задачи работы:
Ознакомление с конструкцией основных модулей робота РБ-242.
2. Изучение устройства и принципа действия промышленного робота РБ-242.
2. Теоретические сведения
2.1. Назначение и технические характеристики робота
Промышленные роботы РБ-242 (рис.1) предназначены для автоматизации технологических процессов в системах металлообработки с ЧПУ и применяются для транспортирования заготовок и деталей. Роботы данного типа могут применяться для обслуживания станков с ЧПУ и обрабатывающих центров.
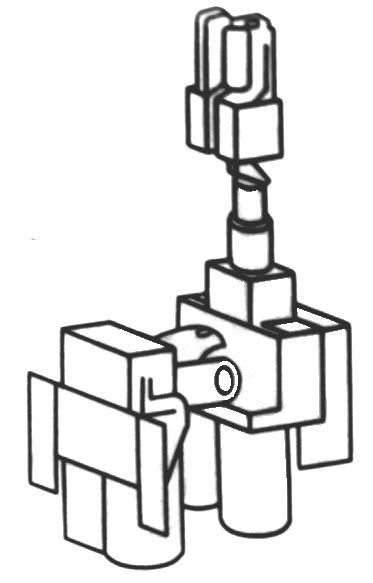
Рис.1. Промышленный робот РБ-242
Технические характеристики ПР РБ-242
Номинальная грузоподъемность ..............……………………......10 кг
Максимальная погрешность позиционирования ......……………0,5 мм
Диапазон скоростей перемещения модулей:
линейных ..................................……………………………….8,2 - 500 мм/с
угловых ..................................…………………………………1,36 - 120 град/с
ротация кисти ............................………………………………90 град/с
Число степеней подвижности ....................……………………….4
Тип привода
основных модулей .........................…………………………..электрический
постоянного тока
кисти и схвата ...........................……………………………...пневматический
Максимальные перемещения по осям:
Х, Z - линейные перемещения ........…………………….......150 мм
А - вертикальная ротация ............………………………...…90 град
С - горизонтальная ротация ....……………………….......…120 град
В - вращение плеча ...................…………………………..…180 град
- ротация кисти ........................……………………………270 град
дискретно
по 90 град
Тип системы управления ........................………………………… позиционная
Программоноситель .............................………………………….. ОЗУ, перфолента
Метод программирования ........................……………………….. обучение
Число запоминаемых точек ......................………………………..300
Источник электропитания .......................………………………...3-фазная сеть
380 В, 50/60 Гц
Потребляемая мощность .........................…………………………2 КВт
Источник пневмопитания .......................……………………….... пневмосеть
Рр = 0,5 - 0,7 МПа
Габаритные размеры:
манипулятора .............................…………………………...320х719х1240 мм
устройства управления ...................………………………..575х600х1100 мм
Масса:
манипулятора ..............…………………………….................110 кг
устройства управления ......................………………………..80 кг