

2.2. Устройство и принцип действия пр рб-242
ПР РБ-242 представляет собой комплекс, состоящий из манипулятора и устройства программного управления, соединенные между собой кабелями.
Устройство
управления (УУ) предназначено для
формирования сигналов, управляющих
тремя двигателями постоянного тока (по
осям Х/Z, А/С и В соответственно),
пневмораспределителями ротации кисти
(ось
![]() )
и схвата, а также для выдачи интерфейсных
сигналов на металлообрабатывающий
модуль.
)
и схвата, а также для выдачи интерфейсных
сигналов на металлообрабатывающий
модуль.
Количество элементов в устройстве управления сведено к минимуму за счет использования современной элементной базы и микросхем высокой степени интеграции, специально сконструированных для этой цели.
Устройство управления включает в себя следующие основные элементы:
1. Плату управления, состоящую из микропроцессора, ПЗУ (управляющие программы), ОЗУ (память для данных), схемы управления приводами, схемы интерфейса. Содержимое ОЗУ защищено от стирания при выключении питания путем установки автономного источника питания (батареи).
2. Пульт обучения.
3. Блок управления электроприводами.
4. Блок питания.
Механическая часть робота состоит из четырех основных частей (рис. 2.):
Механизм горизонтального и вертикального линейного перемещения (оси X, Z),
Механизм горизонтальной и вертикальной ротации (оси С, А),
Механизм вращения плеча (ось В),
Механизм ротации кисти (ось
 ).
).
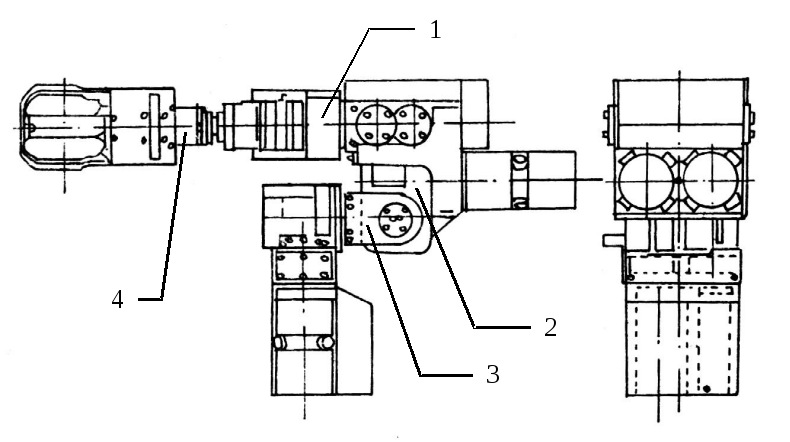
Рис.2. Механическая часть робота РБ-242
Робот РБ-242 может быть оснащен тремя типами схватов, каждый из которых работает с деталями различных размеров. Схват типа Т - самоцентрирующий, имеет три пальца и может удерживать детали массой до 10 кг. Схват типа М – самоцентрирующий, предназначен для работы на сверлильных, шлифовальных и фрезерных станках. Схват типа Д - сдвоенный, состоит из двух симметрично расположенных одинаковых схватов, каждый с двумя пальцами. Предназначен для работы с двумя станками и способен удерживать одновременно две детали, каждая массой до 5 кг. Робот, имеющийся в лаборатории кафедры, оснащен схватом типа Д.
Манипулятор ПР РБ-242 сконструирован таким образом, чтобы минимизировать время транспортировки деталей к месту обработки. Подробный анализ процессов транспортирования деталей показал, что наиболее эффективные траектории движения рабочего органа робота для этих операций могут быть получены в случае комбинации двух цилиндрических координатных систем.
Промышленный робот РБ-242 работает в двойной цилиндрической системе координат и имеет одну руку при четырех степенях подвижности. Это позволяет ему совершать разнообразные движения в шести различных направлениях (рис. 3):
горизонтальное линейное перемещение (ось X),
вертикальная ротация (ось А),
вертикальное линейное перемещение (ось Z),
горизонтальная ротация (ось С),
вращение плеча (ось В),
ротация кисти (ось
 ).
).
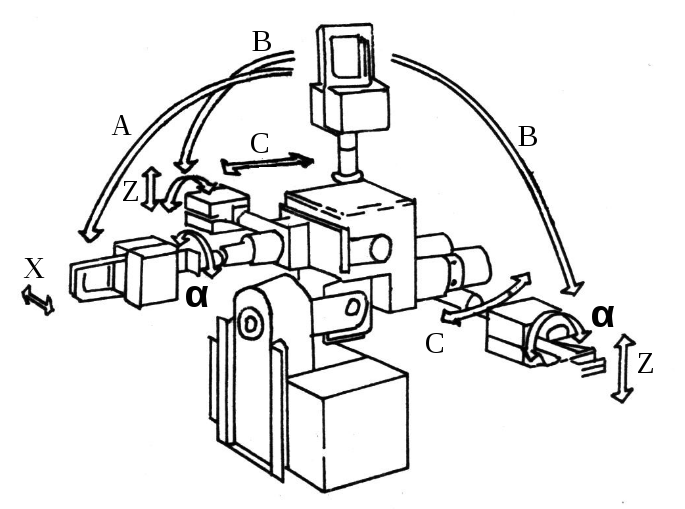
Рис.3. Движения робота РБ-242
Робот
осуществляет прецизионное позиционирование
по всем осям (за исключением оси
![]() )
с помощью трех двигателей постоянного
тока. Позиционирование по оси
)
с помощью трех двигателей постоянного
тока. Позиционирование по оси![]() ,
может осуществляться в двух или
четырех
фиксированных точках (в зависимости от
конструкции кисти), управление
позиционированием в этом случае
осуществляется по типу «включено/выключено».
,
может осуществляться в двух или
четырех
фиксированных точках (в зависимости от
конструкции кисти), управление
позиционированием в этом случае
осуществляется по типу «включено/выключено».
Скорость движения робота по каждой из осей X, А, Z, С, В может регулироваться в пределах, указанных выше, путем выбора одной из восьми возможных скоростных групп движений (табл. 1).
Скорости движения
Таблица 1
-
Скоростная группа
Скорости
при перемещении
по осям X, Z,
мм/с
при ротации
по осям А, С,
град/с
при ротации
по оси В,
град/с
1
8.2
1.36
1.36
2
71
17
17
3
143
34
34
4
214
51
51
5
286
69
69
6
357
86
86
7
429
103
103
8
500
120
120
Шаговая скорость 1
0.0409 мм
0.006818
град.
0.006818
град.
Шаговая скорость 2
0.2046 мм
0.03409
1 град.
0.03409
град.
ПРИМЕЧАНИЕ: если в левом разряде дисплея цифра 0 или пусто, то возможно движение с шаговой скоростью соответственно по 5 или по 1 импульсу для каждой из осей. Перемещение в ручном режиме на указанную величину осуществляется при каждом однократном нажатии соответствующей кнопки.
В пределах каждой скоростной группы, кроме первой, возможно так называемое процентное регулирование скорости движения. Для реализации этого режима необходимо задать один из восьми кодов, соответствующих желаемой величине скорости в процентах от максимальной (табл. 2).
Процентное регулирование скорости движения
Таблица 2
|
Коды |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Величина скорости, % |
5 |
10 |
20 |
30 |
50 |
70 |
85 |
100 |
Точки позиционирования работа РБ-242 могут определяться двумя способами:
соответствующими значениями координат по Х, А, В осям,
соответствующими значениями координат по Z, С, В осям.
В точках позиционирования, определенных таким образам, робот может захватывать деталь, управлять технологическим оборудованием или выполнять другие специальные функции.
Подобные функции специфицируются записью особых цифровых кодов, называемых обслуживающими кодами робота или S-кодами.
Значения координат по осям вместе с соответствующими S-кодами и номером скоростной группы образуют одну точку позиционирования, называемую точкой с данными. В каждой точке позиционирования могут быть записаны до 5 S-кодов. В табл.3 показаны элементы, образующие одну точку (адрес с данными).
Элементы точки с данными
Таблица 3
-
Скоростная группа (1-8)
Координаты по оси Х (Z)
Координаты по оси А.(С)
Координаты по оси В
S-код N 1
S-код N 2
S-код N 3
S-код N 4
S-код N 5
Управляющие данные для робота представляют собой последовательность точек (адресов), составляющих программу, выполнение которой приводит к реализации какого-либо действия, например, установка и снятие детали. Эти данные сохраняются в ОЗУ устройства управления, причем каждая точка получает порядковый номер от 0 до 299 (адрес).