

2.1. Назначение, состав и функции устройства упм-772
Унифицированное управляющее устройство УПМ-772 [I] построено по принципу синхронного микропрограммного автомата (МпА) с конечным числом состояний, жестким циклом управления и предназначено для формирования микрокоманд управления в соответствии с алгоритмом работы ПР.
Структурная схема устройства УПМ-772 представлена на рис.2.
Микропрограмный автомат
управления Пульт
управления
Блок управления
приводом
Буферное запоминающее устройство
Операционно-логический блок
Программоноситель КНМЛ
Блок измерения













 ШинаA
ШинаA




Шина А
Шина В

Шина С
Блок синхронизации
Блок отработки технологической команды






Сигналы синхронизации
С датчиков ПР На
(от) технологическое оборудование
Рис 2. Структурная схема устройства УПМ-772
Реализация функций центрального управления и логической обработки информации осуществляется операционно-логическим блоком. Обмен информацией между функциональными блоками устройства выполняется через шины А, В и С. В качестве программоносителя в устройстве используется кассетный накопитель на магнитной ленте (КНМЛ), осуществляющий прием, хранение и выдачу требуемых программ по запросу из МпА.
Буферное запоминающее устройство полупроводникового типа предназначено для оперативного хранения рабочей программы.
Формирование последовательностей импульсов, синхронизирующих функционирование устройства в целом, выдержек времени, а также частот, необходимых для работы измерительной системы, осуществляется блоком синхронизации.
Блок измерения обеспечивает цифровое измерение положений манипулятора и содержит канальные преобразования сигнала датчиков в сдвиги фаз и преобразователи типа “Фаза-код”.
В качестве блока управления приводом используется функциональный цифроаналоговый преобразователь с элементами запоминания выходных напряжений, поступающих на привод. Управление скоростью движения манипулятора при работе устройства по программе осуществляется путем изменения кода информации, поступающей на код блока.
Устройство управления реализовано на интегральных микросхемах серии К-155.
Пульт управления предназначен для задания режимов работы, организации ручного ввода информации и ее цифровой индикации.
Вид пульта управления представлен на рис. 3.
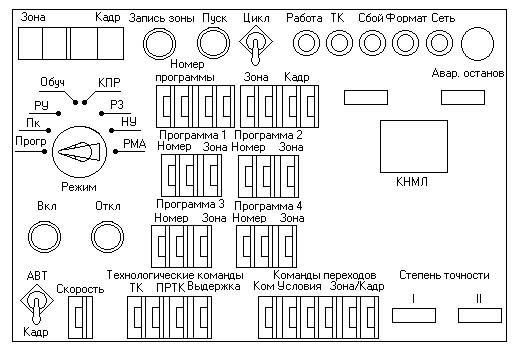
Рис. 3.Пульт управления устройства УПМ-772
В состав устройства управления УПМ-772 входит так же пульт обучения, предназначенный для задания с помощью кнопок геометрических перемещений манипулятора по координатам с заданной скоростью и записи кадра обучения в устройство управления.
Вид пульта обучения представлен на рис. 4.

Рис. 4. Пульт обучения устройства УПМ-772
2.2. Технические характеристики устройства упм-772
Технические характеристики устройства представлены в табл. 2.
|
Тип системы управления |
Позиционный |
|
Система отсчета в абсолютных величинах |
Числовая |
|
Число управляемых координат |
До 7 |
|
Метод программирования |
Обучение |
|
Тип управляемого привода |
Следящий |
|
Число временных выдержек на отработку технологических команд |
От 0 до 30 |
|
Характеристика разгона-торможения привода |
Ступенчатая, с числом не менее7, с регулировкой ступеней |
|
Выходной сигнал на привод |
Постоянное напряжение, изменяющееся от +10 до –10 В, при токе нагрузки 5 мА |
|
Датчики ОС |
Двухотсчетные синусно-косинусные вращающиеся трансформаторы типа СКТД-646 5Д |
|
Дискретность оцифровки |
5-15 |
|
Число степеней точности |
3 |
|
Число задаваемых скоростей одновременно для координат |
4 |