

1. Назначение и технические характеристики робота
Промышленные роботы ПР5–2Э различного исполнения предназначены для выполнения сборочных, вспомогательных и других операций, а также функций управления в составе робототехнических комплексов в приборостроении.
Роботы ПР5–2Э являются универсальными сверхлегкими стационарными встраиваемыми роботами с одним манипулятором модульной конструкции, работающим в цилиндрической или прямоугольной декартовых системах координат. Привод пневматический. Управление цикловое по временному принципу, осуществляется программируемым микроконтроллером через посредство блока пневмораспределителей. Программа вводится в запоминающее устройство микроконтроллера путем последовательного набора команд на клавиатуре пульта управления.
Структурно кинематическая схема манипулятора робота исполнения ПР5 – 2Э приведена на рис. 1.
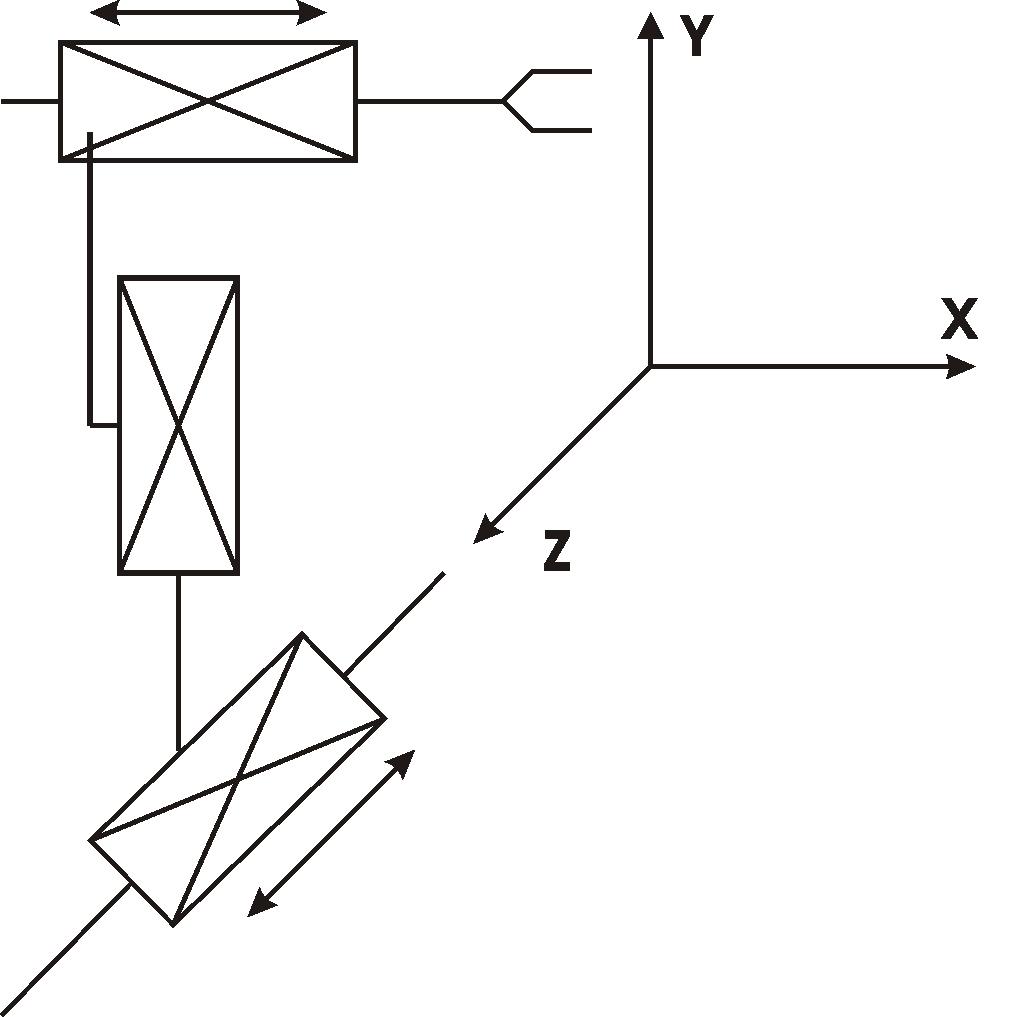
Рис. 1. Структурно-кинематическая схема
Технические характеристики ПР
Номинальная грузоподъемность….............………………. 0.32кг
Максимальная погрешность позиционирования…..……. 0.1 км
Максимальная скорость перемещения модулей:
линейных……………………………………..........………. 200 мм/с
угловых …..........................………………………………… 180 град/с
Число степеней подвижности ….............………………… 3
Максимальное перемещение по осям: Х = 150 мм, Y = 50 мм,
Z = 160 мм
Объем памяти для хранения программ………………….. 256 команд
Время хранения программы не менее 6 месяцев.
2. Устройство робота пр5–2э
Роботы ПР5–2Э выполнены по блочно-модульному принципу. Рассматриваемый робот (рис. 2) содержит 3 модуля линейных перемещений, блок пневмораспределителей БРП – 4 с четырьмя пневмораспределителями (три распределителя управляют работой модулей манипулятора, 4-й схват), программируемый микроконтроллер МКП – 1 – 16 – 0.5,имеющйй 16 входов и выходов и объем памяти 512 байт.
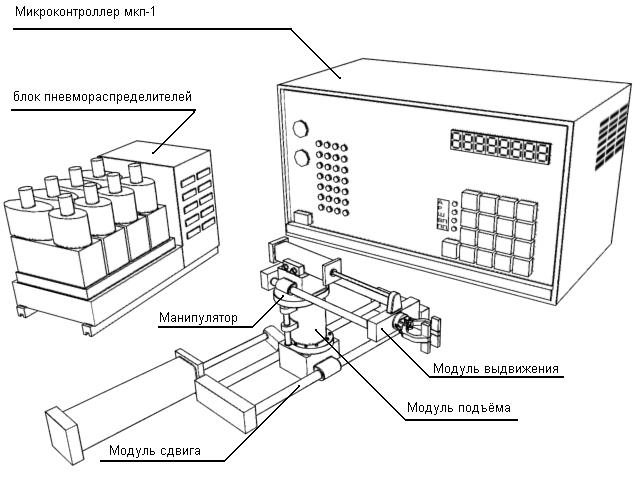
Рис. 2. Общий вид робота ПР5–2Э–5.4.3–16–0.5
Модули линейных перемещений представляют собой функционально законченные звенья, снабженные пневмодвигателями, устройствами демпфирования ударов в конце хода, устройствами регулирования скорости и величины перемещения.
Для демпфирования ударов используются специальные пневмоцилиндры, снабженные дросселями и обратными клапанами. Роль обратных клапанов со стороны штоков выполняют уплотнительные макеты, работающие по штоку. Действие демпфирующих цилиндров основано на том, что энергия удара перемещающихся масс расходуется на проталкивание сжимаемого в цилиндре воздуха через малые сечения дросселирующих каналов.
Программируемый микроконтроллер МКП–1 предназначен для циклового двухпозиционного управления манипуляторами и технологическим оборудованием.
Областью наиболее эффективного применения микроконтроллера является управление роботизированными технологическими комплексами и автоматическими линиями при автоматизации технологических процессов в условиях серийного и мелкосерийного производства, когда требуется развитое программно-логическое управление, оперативная смена управляющих программ, а использование универсальных средств вычислительной технике экономически нецелесообразно ввиду их высокой стоимости и сложности обслуживания.
Микроконтроллер осуществляет формирование сигналов на исполнительные устройства, прием информации от датчиков состояния оборудования, формирование выдержек времени, управление счетчиками, обращение к подпрограммам, организацию условных и безусловных переходов по программе, а также редактирование и контроль программ, и тестовый контроль модулей.
Режимы работы:
под управлением программы, записанной в память рабочих программ (автоматическое управление);
под управлением команд, поданных с пульта управления (ручное управление)
пошаговое выполнение программы;
запись команд в память рабочих программ (программирование);
просмотр программы (вывод на индикацию содержимого памяти рабочих программ).
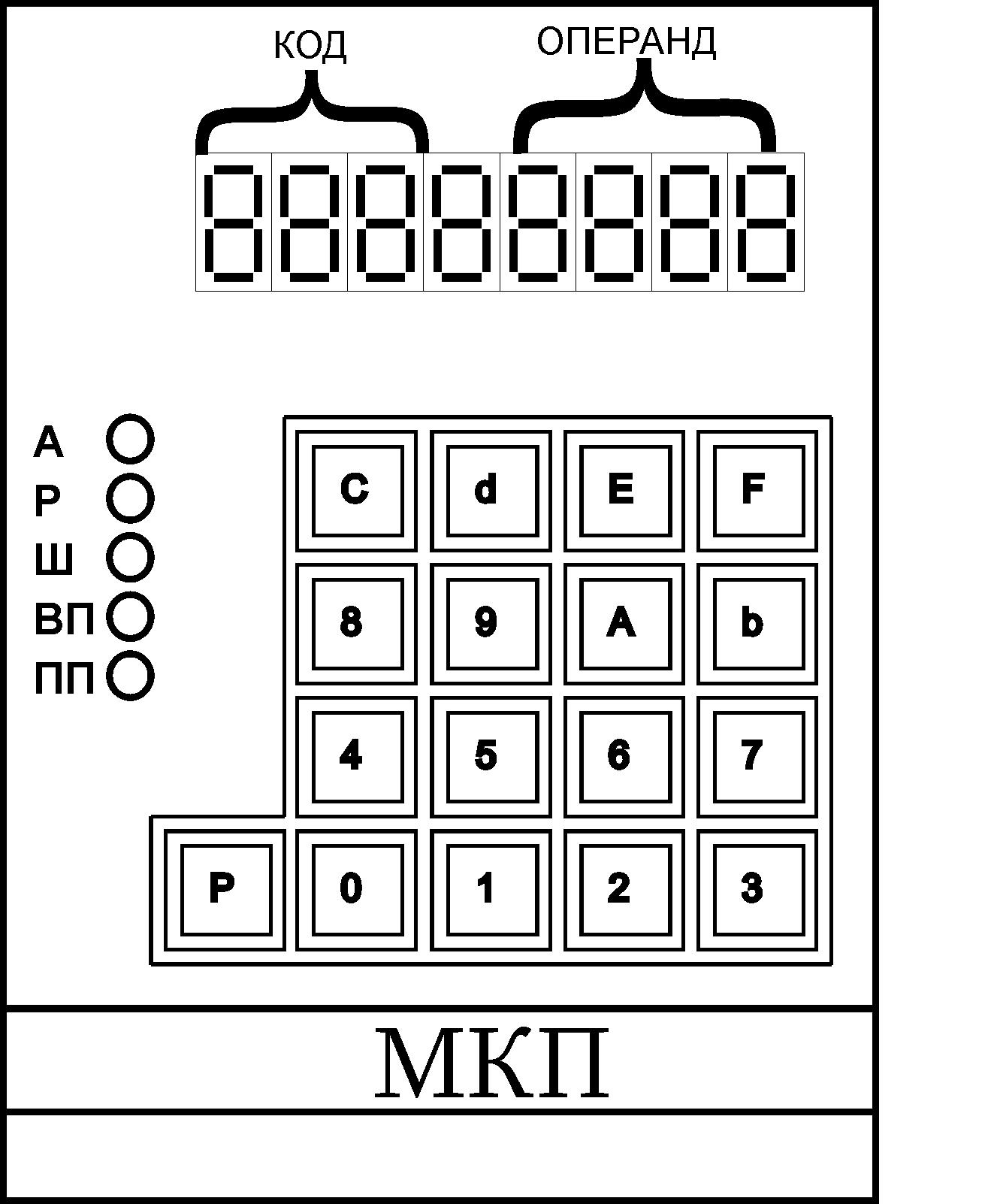
Рис. 3. Пульт управления микроконтроллера
Ввод и отладка программы, управление режимами работы осуществляется с встроенного пульта управления (рис. 3). Отображение информации – на однострочном дисплее из восьми семи – сегментных индикаторов и светодиодных индикаторах пульта управления. При вводе информации с клавиатуры пульта управления и выводе ее на дисплей используется шестнадцатеричная система счисления.