

5. Контрольные вопросы
1. Объяснить принцип позиционирования в цикловых работах.
2. Изобразить графически укрупненную схему цикловых систем управления и указать функциональное назначение блоков.
3. Назвать виды программоносителей и методы записи программ в цикловых системах управления.
4. Объяснить функциональное назначение следующих команд в системе ЭЦПУ-6030: ТЕХНОЛОГИЧЕСКАЯ КОМАНДА, ВВДЕРЖКА ВРЕМЕНИ, ПРОПУСК, ПЕРЕХОД, ОСТАНОВ, КОНЕЦ ПРОГРАММЫ.
5. Объяснить функциональные возможности системы ЭЦПУ-6030 в режимах: РУЧНОЙ, КОМАНДА, ЦИКЛ, АВТОМАТ.
6. Что такое работа по путевому принципу?
7. Что такое работа по временному принципу?
8. Объяснить функциональное назначение обратной связи в цикловых системах управления.
9. В каких технологических процессах допускается применение цикловых роботов?
Библиографический список
1. Робототехника и гибкие автоматизированные производства: В 9-ти кн. Кн. 9. Лабораторный практикум по робототехнике: Учеб. пособие для втузов/ Б. З. Рахманкулов, В. П. Лещинский, С. В. Манько и др.; Под ред. И. И. Макарова. – М.: Высш. школа, 1986 г. - 176 с.
2. Управляющие системы промышленных роботов/Е. И. Андрианов, Л. Я. Глейзер, М. Б. Игнатьев и др. - М.: Машиностроение, 1984 - 231с.
ЛАБОРАТОРНАЯ РАБОТА № 6
ИЗУЧЕНИЕ ПОЗИЦИОННОЙСИСТЕМЫ УПРАВЛЕНИЯ УПМ-772
ПРОМЫШЛЕННОГО РОБОТА ТУР-10
1. Цель работы
Цель работы – изучение позиционной системы управления промышленного робота (ПР) и получение практических навыков в составлении и отладке программы работы устройства.
Теоретические сведения
2.1. Технические характеристики
Позиционные системы управления ПР предназначены для получения достаточно большого(по сравнению с цикловыми системами управления) числа точек позиционирования в рабочем пространстве манипулятора, без контроля движения между ними (в отличии от контурных систем управления). Позиционные системы используются для управления следящими электрическими, электрогидравлическими и пневматическими приводами замкнутого типа.
При проведении настоящей лабораторной работы используется ПР ТУР-10 с управлением от унифицированного устройства позиционного числового программного управления УПМ-772. Кинематическая схема ПР ТУР-10 приведена на рис. 1.
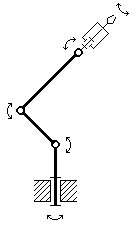
Рис. 1. Кинематическая схема ПР ТУР-10
Технологический универсальный робот ТУР-10 является шарнирно-сочлененным электромеханическим роботом с приводами, расположенными на основании, работающем в угловой системе координат. Он предназначен для автоматизации основных технологических операций, таких как сборка, точечная сварка, окраска и т. д. , а так же для выполнения вспомогательных операций при обслуживании различного технологического оборудования. Основные технические характеристики ПР ТУР-10 приведены в табл. 1.
Таблица 1
|
Число степеней подвижности, шт. |
6 |
|
Грузоподъемность, кг. |
10 |
|
Точность позиционирования, мм. |
(-0,2) – (+0,2) |
|
Тип управляющего устройства |
позиционное |
|
Масса манипулятора, кг. |
230 |