

1.2. Статические характеристики соединений нэ
При рассмотрении статики нелинейных систем сигналы на входе и выходе не зависят от времени, а линейное динамическое звено, входящее в систему, можно рассматривать как пропорциональное и объединить его с нелинейным статическим звеном.
Если система содержит несколько нелинейных звеньев, то для упрощения дальнейшего анализа нелинейной АСУ ее в некоторых случаях можно рассматривать как систему с одной нелинейностью, предварительно заменив нелинейные элементы одним звеном с результирующей статической характеристикой. Такая замена возможна как при последовательном, так и при параллельном или встречно-параллельном соединении НЭ.
На рис. 1.8 показана схема (а) и построение (б) результирующей характеристики при последовательном соединении двух нелинейных элементов. В первом квадранте построена характеристика Iвходного звена цепи, а во втором – характеристикаIIследующего звена, но так, что оси ее повернуты на 90: ось абсциссx2совпадает с осью ординатy1, а ось ординатy2направлена по отрицательной полуоси абсцисс. Построение результирующей характеристики ясно из рисунка. Она показана на рис. 1.8, в.
|
а) | |
|
б) |
в) |
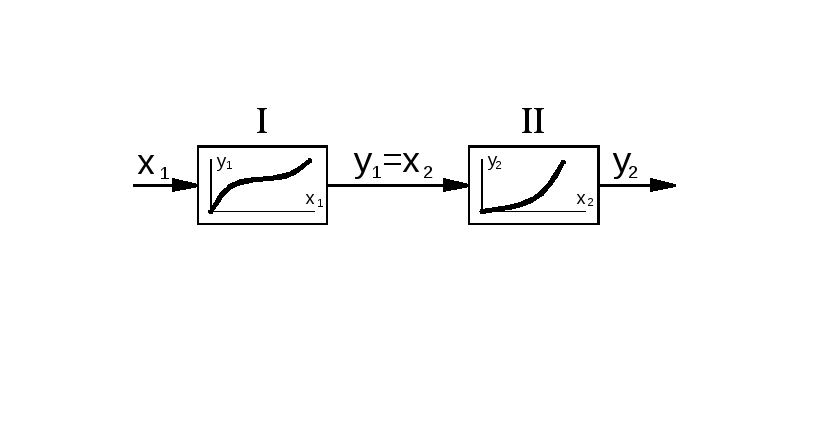
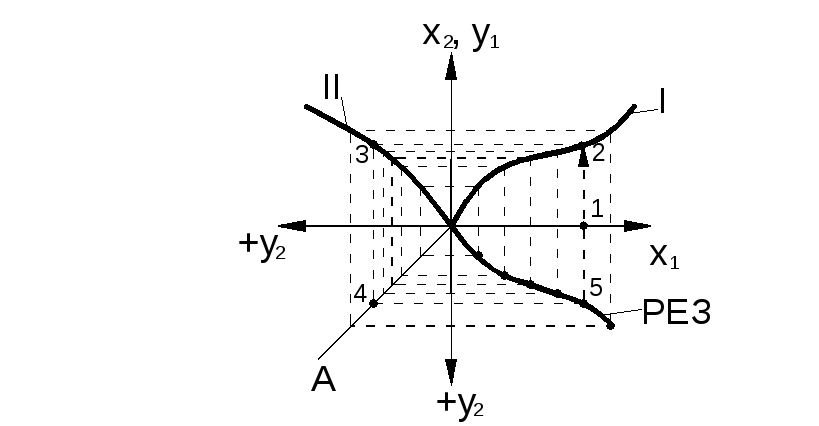
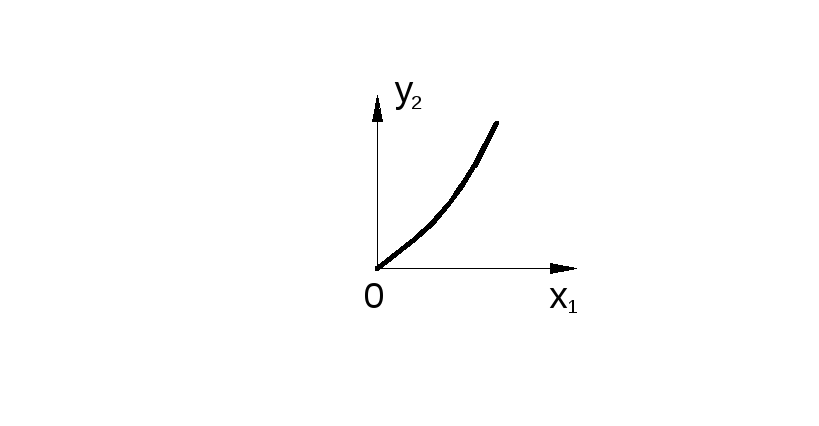

Рис. 1.8. Последовательное соединение НЭ
Заметим, что луч 0A – биссектриса.
При параллельном включении звеньев (рис. 1.9) результирующая характеристика находится весьма просто. Построив на одном графике характеристики звеньев и просуммировав их, получим характеристику эквивалентного звена.
Суммирование сигналов иллюстрируется рис. 1.9, б, а вычитание – рис. 1.9, в.
Встречно-параллельное соединение НЭ может рассматриваться как для случая отрицательной (рис. 1.10), так и положительной (рис. 1.11) обратной связи.
|
а) | |
|
б) |
в) |
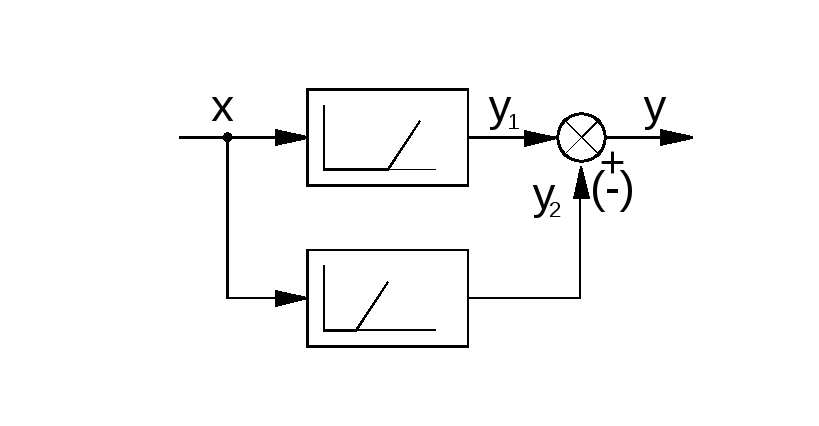
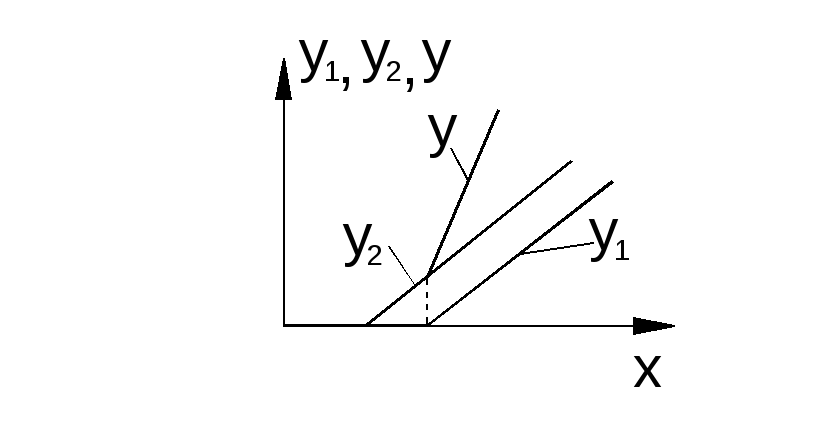
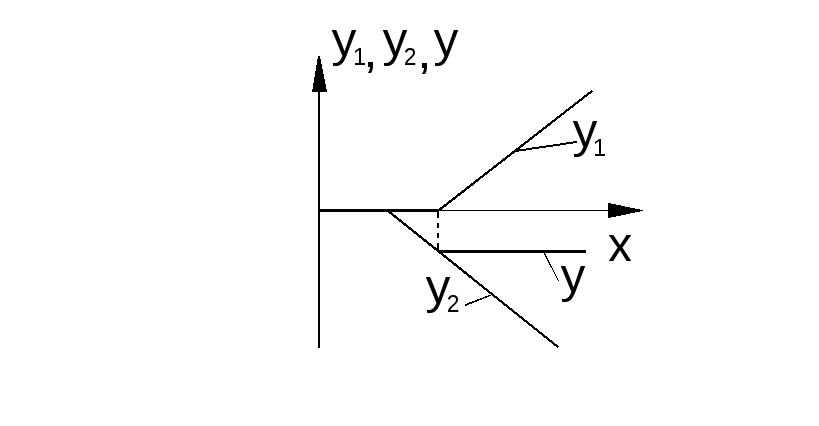
Рис. 1.9. Параллельное соединение НЭ
Структурная схема нелинейной отрицательной обратной связи приведена на рис. 1.10, а, а построение для нее результирующей характеристики – на рис. 1.10, б.
|
а) |
б) |

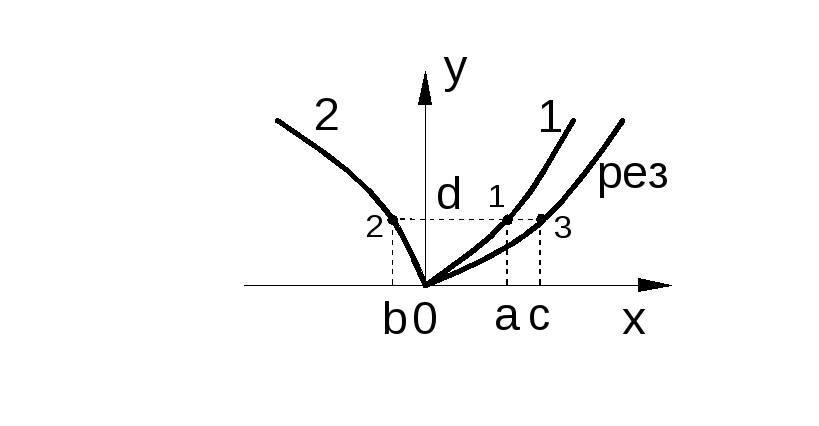
Рис. 1.10. Нелинейная отрицательная обратная связь
В первом квадранте построена характеристика звена 1, а во втором – характеристика звена 2, стоящего в цепи обратной связи. Пусть, например, при отключенной обратной связи входной сигнал xсоответствует отрезку 0a. Тогда в соответствии с характеристикой звена 1 выходной сигналyсоответствует отрезку 0d. При наличии обратной связи отрезок 0aбудет равен результирующему входному воздействию: 0a=x–y2, гдеy2=f(y) – определяется характеристикой обратной связи. Поэтому при включении обратной связи для обеспечения такого же сигнала на выходе соединения на вход надо подать сигнал 0с= 0a+ 0b. Для получения результирующей характеристики достаточно перенести отрезок, равный 0b, по горизонтали вправо. Получим точку 3 результирующей характеристики.
При положительной обратной связи (рис.1.11) характеристики обоих звеньев удобно строить в первом квадранте. Искомая абсцисса 0срезультирующей характеристики (рис.1.11,б) определяется как разность
0с = 0а – 0b.
|
а) |
б) |

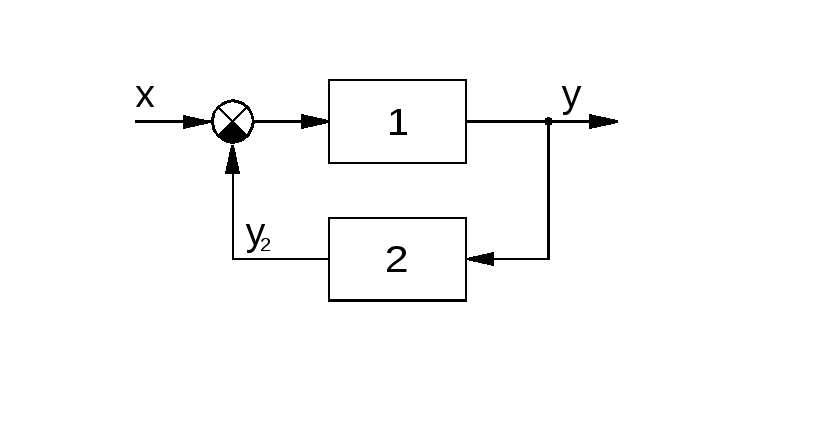
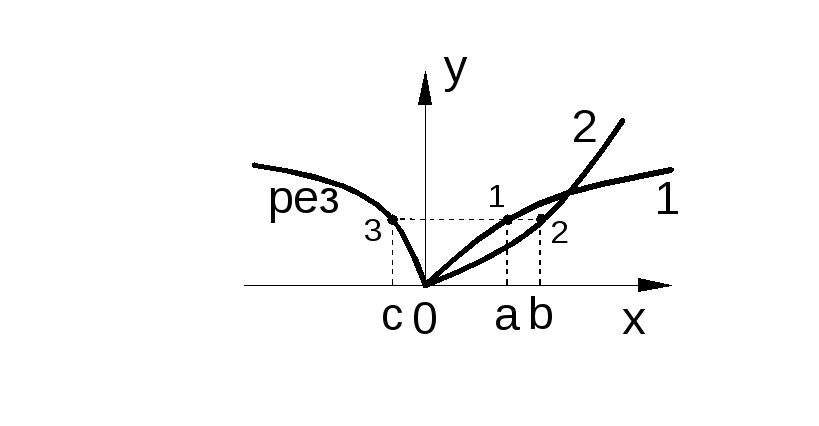
Рис. 1.11. Нелинейная положительная обратная связь
Отметим, что если между нелинейными звеньями имеются разделяющие их инерционные звенья, то описанные выше преобразования выполнить нельзя. В этом случае систему относят к классу систем с несколькими нелинейностями, которые здесь рассматриваться не будут.
Иногда в качестве звеньев обратной связи используют пропорциональные звенья. Пусть, например, звено типа ограничение с зоной нечувствительности охвачено отрицательной (рис. 1.12, а) или положительной (рис. 1.12, б) жесткой обратной связью с коэффициентом передачи kOC.
|
а) |
б) |
|
в) | |

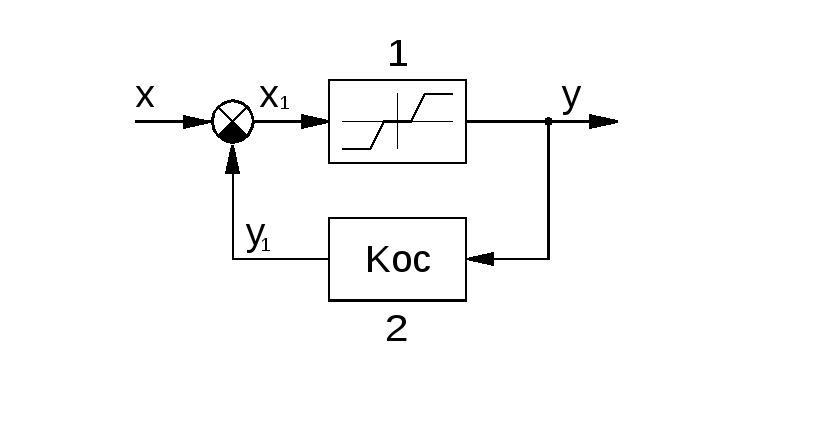
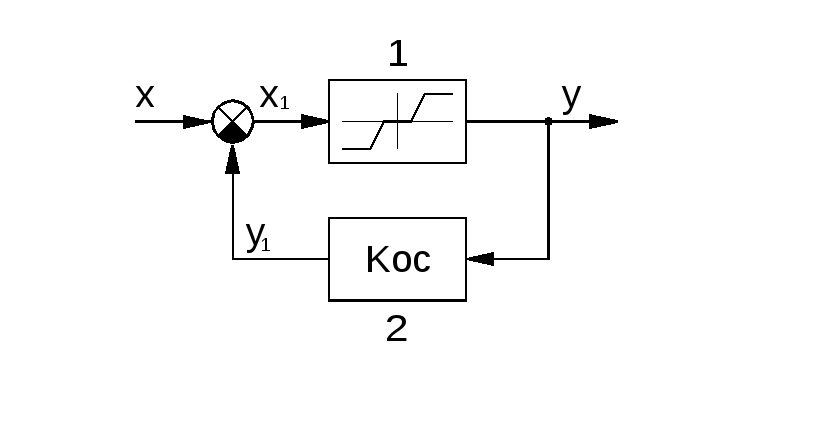
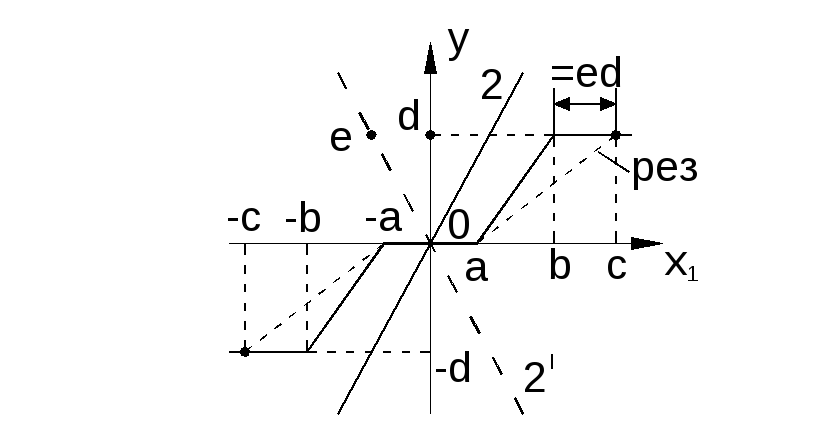
Рис. 1.12. Охват нелинейного звена жесткой обратной связью
В этом случае характеристика обратной связи линейна. Построение результирующей характеристики для обоих случаев показано на рис. 1.12, в. На рис.1.12, в пределам линейной зоны без обратной связи соответствует отрезок аb на оси абсцисс, а при наличии обратной связи – отрезок ас, причем
c = b + d kOC.