

1.1. Типовые нелинейности
Рассмотрим некоторые существенные нелинейности, которые не поддаются линеаризации методами малых отклонений.
1.1.1. Элемент с зоной нечувствительности
Такой характеристикой обладает большинство исполнительных механизмов. Например, электродвигатель исполнительного механизма будет находиться в покое до тех пор, пока крутящий момент не превысит момент сопротивления на валу двигателя. Нелинейная функция будет иметь вид (см. рис. 1.3)
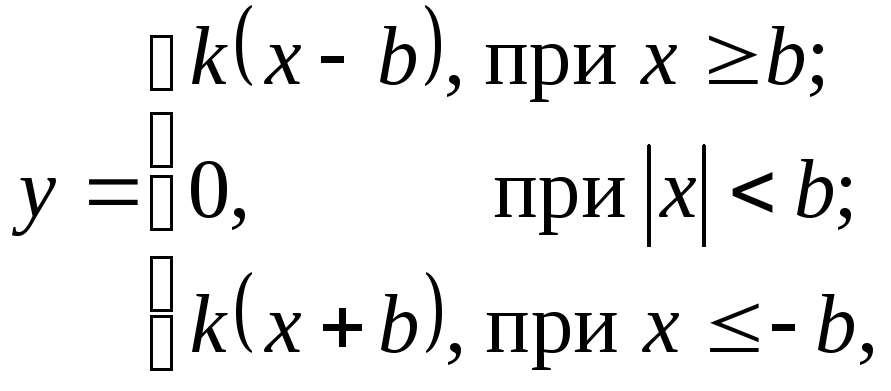
где k – коэффициент пропорциональности (k = tg ).
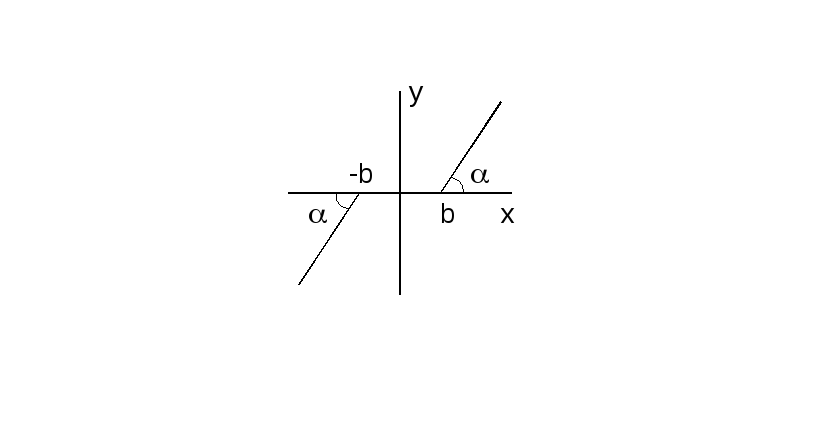
Рис. 1.3. Характеристика звена с зоной нечувствительности
1.1.2. Элемент с мертвым ходом (люфт)
При наличии люфта, т.е. зазора в механической передаче (поясняется на рис. 1.4, а) перемещение ведущего звена mне вызывает перемещения ведомогоnдо тех пор, пока не будет выбран зазор. Характеристика такой нелинейности приведена на рис. 1.5, б. Величина зазора равна 2b,tg = k. Из характеристики видно, что при изменении знака производнойdx / dtведомое звено как бы отключается от ведущего, пока последнее не выберет зазор. При этом зависимостьy=f(x) определяется прямойCD. При следующем изменении направления вращения ведущего вала после выборки зазора зависимость будет определяться прямойAB.
Вход и выход связаны выражением

или
![]() ,
,
где k = tg .
|
а) |
б) |
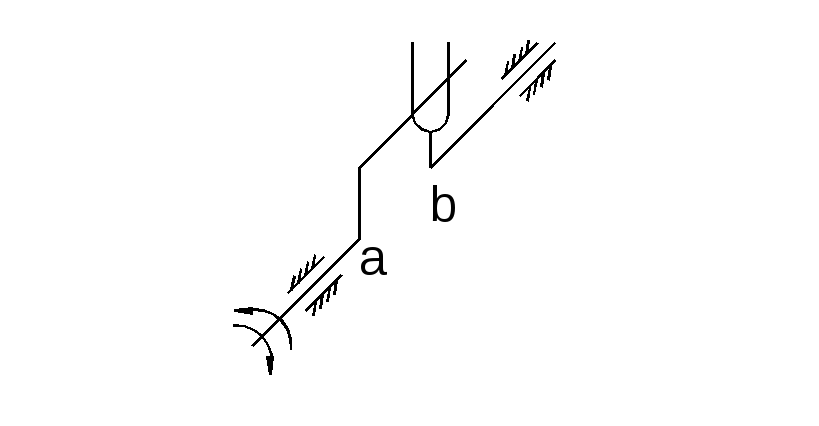


Рис. 1.4. Механический аналог (а) и характеристика (б) звена с зоной нечувствительности
1.1.3. Элемент с насыщением
Характеристика такого нелинейного элемента может иметь вид, показанный на рис. 1.5.
|
а) |
б) |

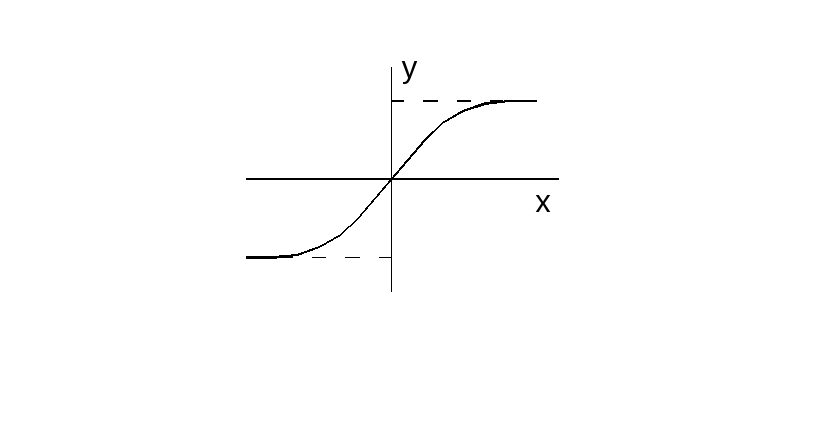
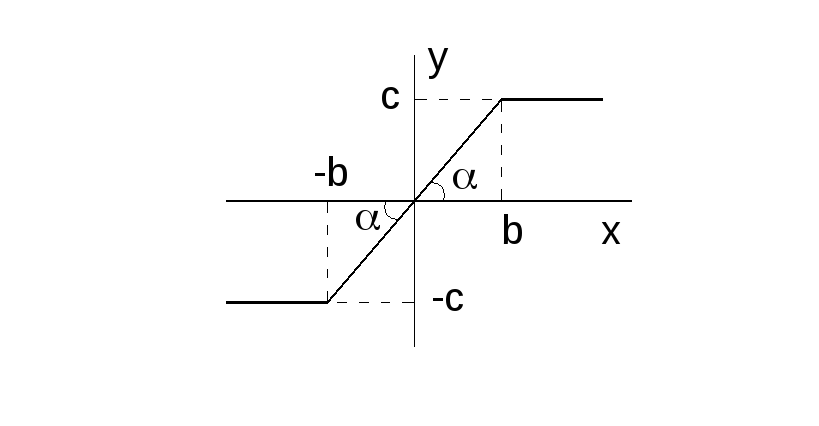
Рис. 1.5. Характеристики звена с насыщением
Нелинейная функция, приведенная на рис. 1.5, б, описывается следующим образом
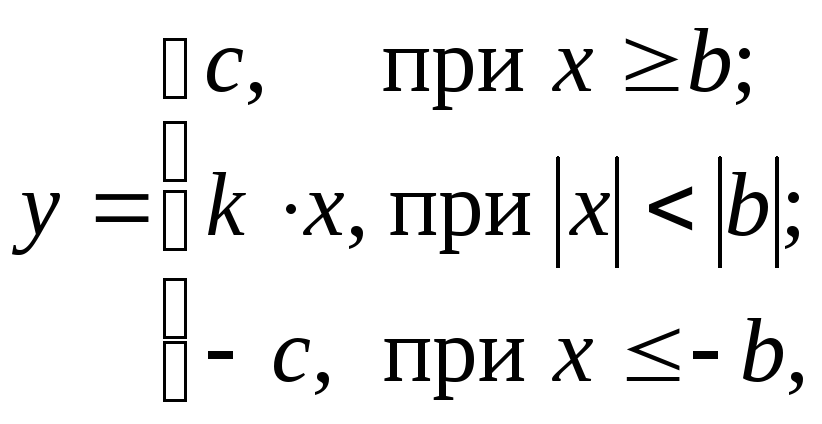
где k = tg .
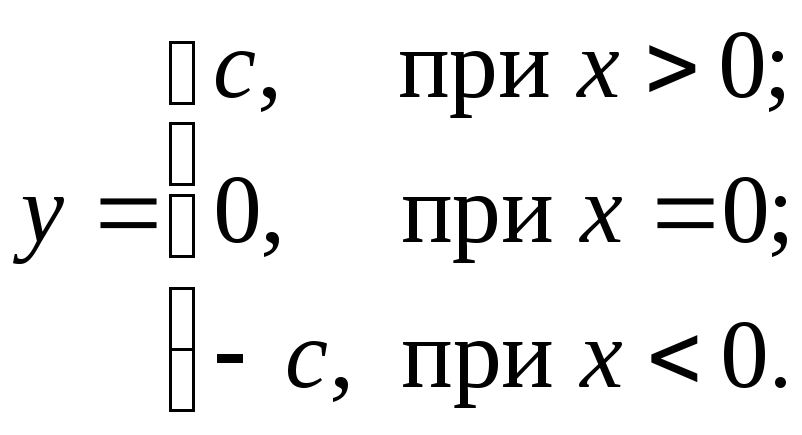
1.1.4. Двухпозиционное реле
Широко распространены элементы, описываемые релейной функцией. Релейной является нелинейная функция, представляющая собой такую зависимость, при которой непрерывному изменению входного сигнала соответствует скачкообразное изменение выходного, происходящее при определенных значениях входного.
Характеристика идеального реле приведена на рис. 1.6, а. Связь между входом и выходом описывается выражением
Для идеального реле
Можно также записать
y = c sgn x.
|
0 а) |
0 б) |
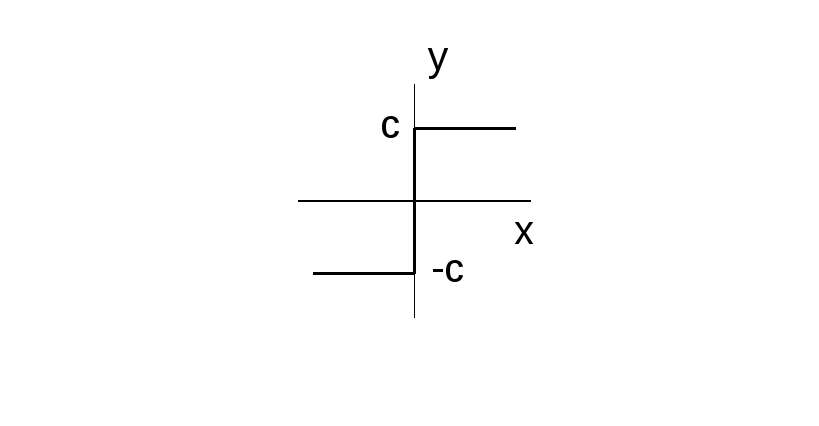
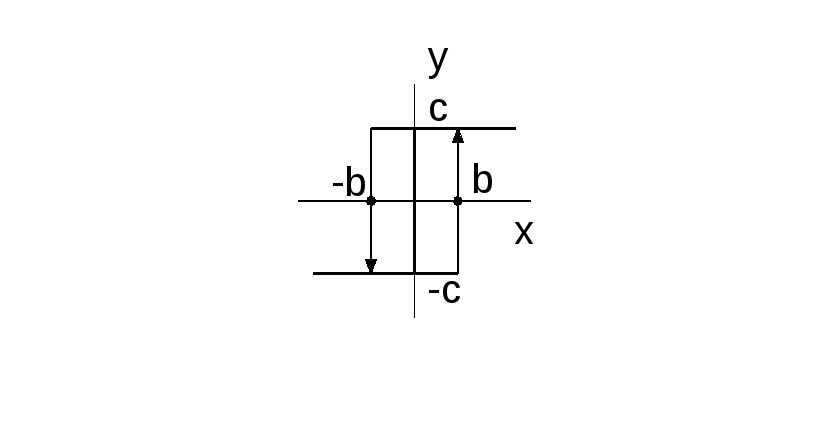
Рис. 1.6. Характеристика идеального (а) и реального (б) двухпозиционного реле
Реальное двухпозиционное реле имеет характеристику с зоной неоднозначности (рис. 1.6, б) и описывается выражением
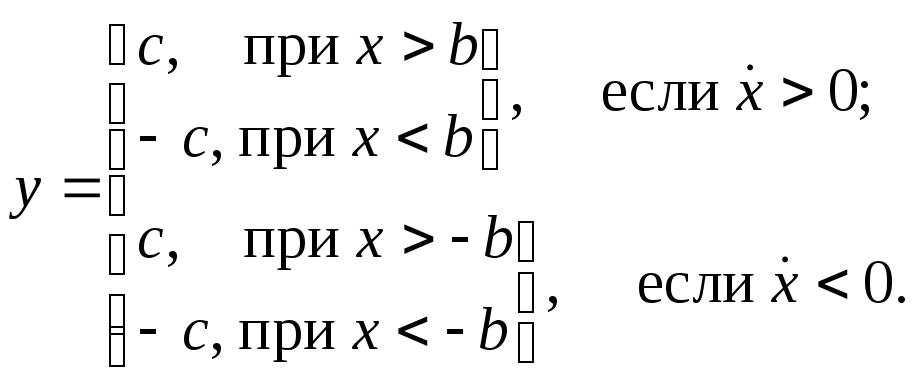
Другие нелинейности и их характеристики можно найти в литературе [2 ‑ 4].
С учетом реальных характеристик элементов систем управления структура последних существенно усложняется. Например, в следящих системах с электроприводом обычно имеется редуктор с зубчатой передачей. В комбинации электродвигатель-редуктор наблюдаются нелинейные явления: насыщение в магнитной системе двигателя, нелинейное трение и люфт в механической передаче и др.
Структурная схема системы двигатель-редуктор с учетом инерционности двигателя, насыщения его магнитной системы, нелинейного трения и люфта приведена на рис. 1.7.
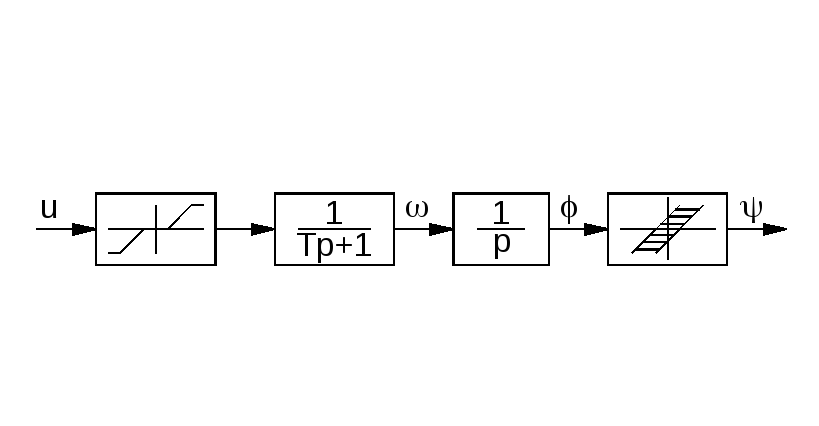

Рис. 1.7. Структурная схема системы двигатель-редуктор:
uy – напряжение управления; uп – напряжение на якоре двигателя; и – круговая частота и угол поворота вала двигателя соответственно; – угол поворота выходного вала редуктора
Эта схема является типичной для различных исполнительных устройств и используется при расчете автоматических систем.