

3.2. Оценка качества нелинейных систем
Основные положения по оценке качества линейных систем справедливы и для нелинейных систем. Используются те же показатели качества: время регулирования, перерегулирование, количество колебаний и т.д.
Однако эти показатели качества, в отличие от линейных систем, зависят от величины входных воздействий.
Наличие нелинейностей оказывает влияние на динамическую точность системы и может вызывать дополнительные ошибки. Например, если система включает нелинейность с зоной нечувствительности, то при ошибках системы, меньших этой зоны, система оказывается разомкнутой и не отрабатывает задающее воздействие. Это приводит к тому, что возникает статическая ошибка, равная зоне нечувствительности. Отметим, что в тех случаях, когда элемент с зоной нечувствительности включен за усилителем с коэффициентом усиления K, статическая ошибка системы уменьшается в K раз.
При включении интегрирующего звена перед элементом с зоной нечувствительности статическая ошибка не возникает, т.к. интегрирующее звено обладает «памятью», благодаря чему его выходная величина поддерживается равной зоне нечувствительности. Следует отметить, что качество переходного процесса при этом может ухудшиться.
Существует ряд методов оценивания качества нелинейных систем. Например, вначале, в порядке первого приближения, можно построить кривую переходного процесса, не принимая во внимание нелинейности. Это возможно, если нелинейности влияют на поведение системы несущественно (незначительная зона нечувствительности, неоднозначная характеристика с узкой петлей и т.п.).
Если в автоколебательной системе существует ограничение на амплитуду колебаний, то это ограничение обеспечивается, введением дополнительной обратной связи по производной (см. разд. 2).
Если система включает несущественные нелинейности и рассматривается как линеаризованная, то при определении переходной функции на первом этапе ступенчатое воздействие следует ограничить по величине, чтобы элементы системы не входили в область насыщения. После исследования системы в линейной области необходимо оценить влияние неучтенных нелинейностей на качество регулирования.
Для построения переходных процессов с учетом нелинейностей применяют методы численного интегрирования, частотные методы и др. Однако в настоящее время существуют мощные средства компьютерного моделирования систем. Поэтому задача сводится к построению модели системы и ее имитационному моделированию с оценкой качества.
Задача оценки качества НС рассматривается на практических занятиях по данной дисциплине (см. разд. 5). При этом используется современный пакет прикладных программ MATLAB/Simulink.
4. Случайные процессы в нелинейных асу
4.1. Нелинейное преобразование случайных сигналов
Нелинейный элемент в общем случае искажает входной случайный сигнал. Принцип суперпозиции к нелинейным системам не применим. Поэтому при одновременном действии полезного регулярного сигнала и случайной помехи (рис.4.1) нелинейное преобразование этих сигналов приводит к тому, что помеха в той или иной степени может «засорить» полезный сигнал.
Пусть случайный сигнал на входе системы
![]() ,
(4.1)
,
(4.1)
где
![]() – среднее значение входа;
– среднее значение входа;![]() – центрированная случайная составляющая.
– центрированная случайная составляющая.


Рис. 4.1. Модель прохождения случайного сигнала через НЭ
Будем считать, что случайный процесс
является стационарным и поэтому
![]() .
.
Рассмотрим выходной сигнал НЭ с характеристикой (x). Пусть, например, это будет нелинейный безынерционный элемент с насыщением (рис. 4.2). При малом уровне помех, когда случайный сигналx(t) (кривая 1) не выходит за пределы линейного участка с углом наклона, для выходного сигнала можно записать
![]() ,
(4.2)
,
(4.2)
где
![]() ;
;![]() ;
;![]() .
.

Рис. 4.2. Прохождение случайного сигнала через НЭ с насыщением
С ростом уровня помех входное воздействие
выходит за пределы линейного участка
(кривая 2), а среднее значение выхода
![]() уменьшается и при очень высоком уровне
помех стремиться к нулю.
уменьшается и при очень высоком уровне
помех стремиться к нулю.
Таким образом, с увеличением дисперсии входного случайного сигнала, уменьшается полезный сигнал на выходе НЭ. Одновременно выходной сигнал обогащается как высокочастотными, так и низкочастотными гармониками, то есть спектральный состав сигнала на выходе перестает соответствовать спектральному составу сигнала на входе.
Рассмотрим случай прохождения случайного сигнала через НЭ с зоной насыщения, когда tg = 1 (рис. 4.3).
В пределах линейного участка нелинейный элемент не окажет влияния на форму кривой плотности вероятности
![]() ,
при
,
при
![]() .
.
Уровень
выходного сигнала не может превышать
уровня насыщения. Поэтому вероятность
появления сигнала
![]() равна нулю и, следовательно,
равна нулю и, следовательно,
![]() ,
при
,
при
![]() .
.
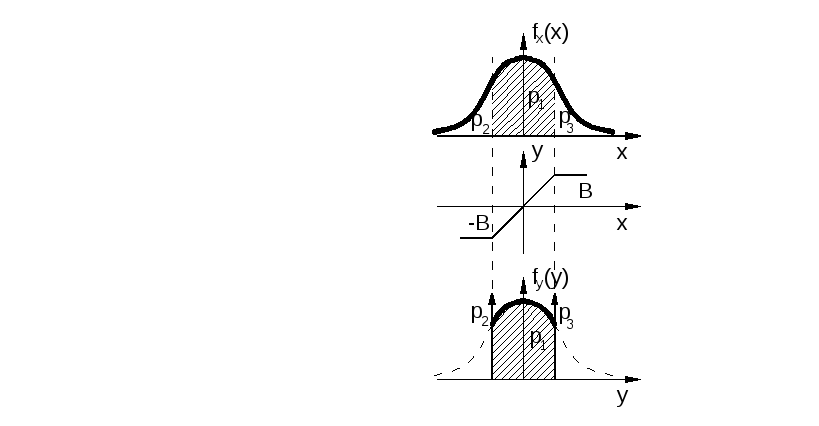
Рис. 4.3. Результат прохождения случайного сигнала
через НЭ с насыщением
Все значения сигнала x > B и x < –B будут преобразовываться в y = B или y = ‑B, т.е. вероятность появления на выходе сигнала B и –B сильно возрастает и представляет собой -функции, т.е. импульсы бесконечно большой величины и бесконечно малой ширины, площадь которых равна P2 и P3.
Можем записать
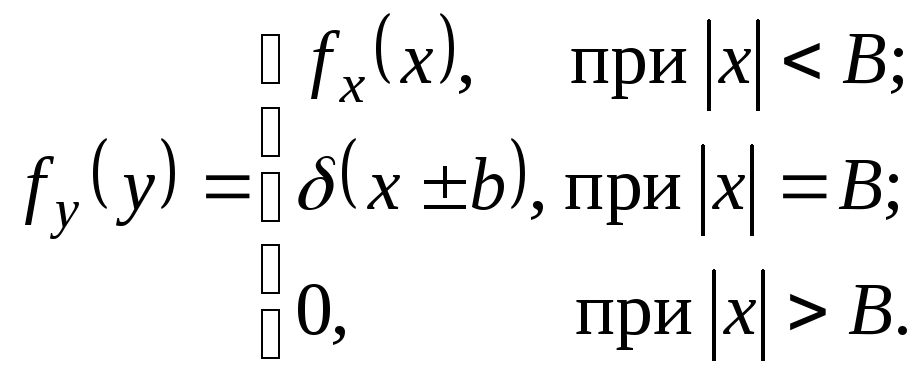
При
этом
![]() .
.
Исследование НС при действии случайных сигналов намного сложнее, чем линейных. Не существует общих точных методов их изучения и поэтому используют приближенные методы.