

Результаты эксперимента
|
c |
b |
f, Гц |
а, с-1 |
А0 |
|
0,8сЗАД |
bЗАД |
|
|
|
|
сЗАД |
bЗАД |
|
|
|
|
1,2сЗАД |
bЗАД |
|
|
|
|
сЗАД |
0,8bЗАД |
|
|
|
|
сЗАД |
1,2bЗАД |
|
|
|
5. Сравнить полученные при моделировании результаты с результатами расчетов и сделать выводы о влиянии параметров с и b НЭ на амплитуду и частоту автоколебаний.
6.
Средствами Simulink
построить фазовую траекторию
![]() .
Воспользовавшись полученными кривыми
переходных процессову(t)
и dу(t)/dt,
нанести на фазовую траекторию 5-7 точек
для выбранных моментов времени.
.
Воспользовавшись полученными кривыми
переходных процессову(t)
и dу(t)/dt,
нанести на фазовую траекторию 5-7 точек
для выбранных моментов времени.
7. Выполнить моделирование для заданных параметров АСУ при заданном (табл. А.1) внешнем воздействии z.
8. Выполнить анализ полученных при моделировании результатов. Обратить внимание на влияние внешнего возмущения на параметры автоколебаний.
9. Сделать выводы.
А.2. Контрольные вопросы
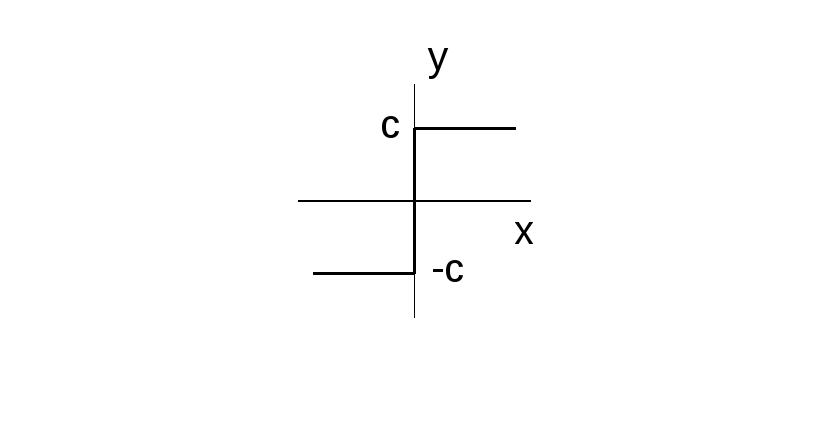
Какие разновидности характеристик релейных элементов вам известны?
В чем суть гармонической линеаризации?
Какие допущения положены в основу метода гармонической линеаризации?
Какова сущность метода гармонического баланса?
Влияют ли параметры линейной части системы на параметры автоколебаний?
Работа в. Исследование релейной аср в скользящем режиме
Цель работы – исследование скользящего режима работы АСР с анализом устойчивости автоколебаний.
Описание исследуемой системы, методика расчета с конкретным примером, а также схема модели в пакете Simulink приведены в разделе 2.5.2.
В.1. Программа выполнения работы
1. Определить параметры автоколебаний в системе без дополнительной обратной связи по производной. Значение параметров передаточной функции линейной части, а также тип и характеристики нелинейного элемента для различных вариантов приведены в табл. В.1.
2. Обосновать справедливость применения метода гармонической линеаризации.
3. Проверить найденный периодический режим на устойчивость.
Таблица В.1
Исходные данные
|
Вариант |
Параметры ФС (р) |
Характеристика НЭ |
AДОП | ||||
|
Статическая характеристика |
Коэффициенты гармони-ческой линеаризации | ||||||
|
K, c-1 |
T, c |
|
q1(A) |
q2(A) | |||
|
|
5 |
0,1 |
0,5 |
c = 10 |
|
0 |
0,5 |
|
2 |
10 |
0,1 |
1,0 | ||||
|
3 |
5 |
0,5 |
1,5 | ||||
|
4 |
10 |
0,05 |
1,0 |
b = 0,5; c = 5 |
при
|
0 |
1,0 |
|
5 |
8 |
0,05 |
0,5 | ||||
|
6 |
5 |
0,05 |
0,05 | ||||
|
|
5 |
0,5 |
0,5 |
b = 5; c = 5 |
при
|
при
|
2,0 |
|
8 |
5 |
0,1 |
0,5 | ||||
|
9 |
10 |
0,2 |
1,0 | ||||
|
|
10 |
1,0 |
0,5 |
b = 0,5; c = 5; = 45 |
при
|
0 |
0,5 |
|
11 |
15 |
1,0 |
0,5 | ||||
|
12 |
5 |
0,2 |
0,5 | ||||
|
|
20 |
0,02 |
0,15 |
c = 5 |
|
0 |
1,0 |
|
14 |
10 |
0,02 |
0,3 | ||||
|
15 |
5 |
0,02 |
0,45 | ||||
|
1 |
5 |
0,5 |
0,5 |
b1 = 2; b2 = 3; c = 2 |
при
|
|
0,5 |
|
17 |
5 |
0,1 |
0,5 | ||||
|
18 |
5 |
0,1 |
1,0 | ||||
 1
1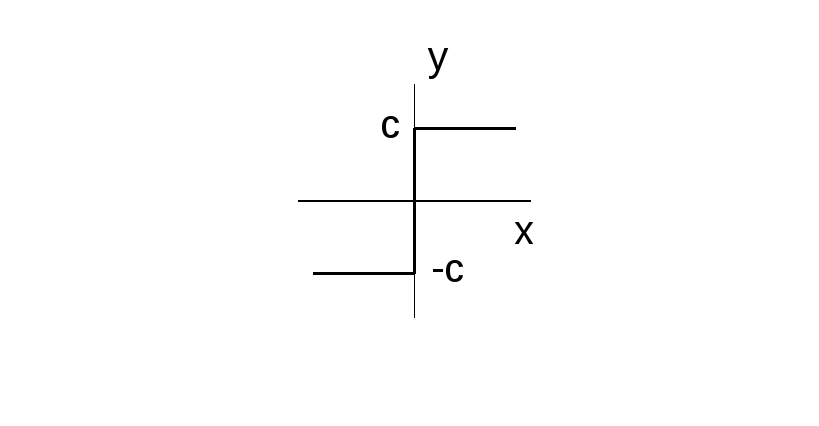

 7
7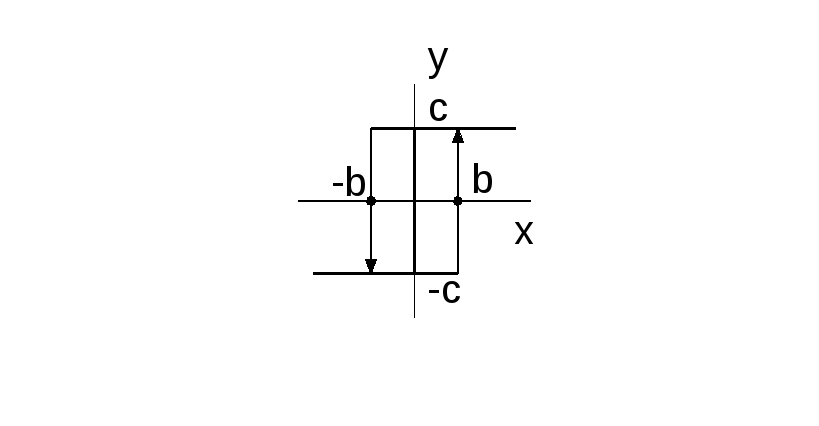
 10
10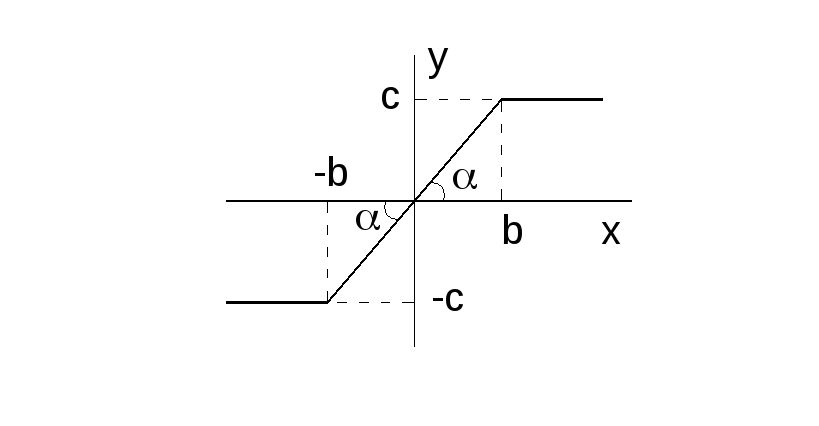
 13
13
 6
6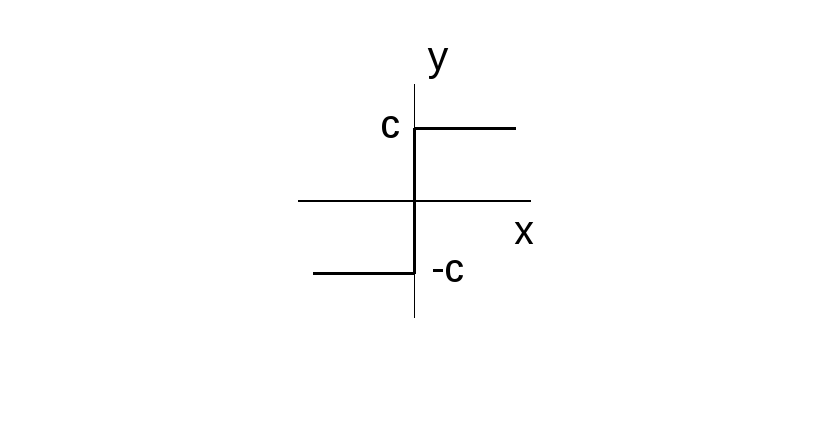
4. Оценить значение коэффициента обратной связи по производной, при котором амплитуда автоколебаний не будет превышать допустимого значения АДОП. Оценить также частоту этих автоколебаний.
5. Создать модель нелинейной системы и выполнить моделирование в двух режимах: без дополнительной обратной связи по производной и с этой обратной связью при найденном значении коэффициента обратной связи. Сопоставить полученные результаты с расчетными.
6. Найти по результатам моделирования зависимость параметров автоколебаний (найденных в п. 1), от значений коэффициента передачи и постоянной времени линейной части, а также от величины параметра снелинейного элемента. Построить соответствующие зависимости.
7. Построить в Simulink фазовые портреты системы с обратной связью и без неё.
8. Сделать выводы по результатам расчетов и моделирования.