

1. Понятие о нелинейных системах
Как уже говорилось, к нелинейным системам (НС) относятся все системы, которые не могут быть описаны линейными дифференциальными уравнениями. Точнее говоря, – все системы, для которых исходные всегда нелинейные дифференциальные уравнения не удается линеаризовать. Линеаризация, т. е. замена нелинейных характеристик линейными, не должна приводить к существенной потере качественных особенностей НС и заметному изменению количественных показателей их работы. Это особенно заметно, если воздействия в реальной системе изменяются в широком диапазоне и линеаризация приводит большим ошибкам. К тому же для НС в отличие от линейных принцип суперпозиции не применим.
Обычно в системе можно выделить части, нелинейностью которых можно пренебречь, с высокой степенью достоверности считая их линейными, и части, нелинейностью которых пренебречь нельзя. Эти последние называют нелинейными элементами (НЭ). Некоторые НЭ поддаются линеаризации, а некоторые – нет. Последние называют НЭ с существенными нелинейностями. Система, содержащая хотя бы один существенно нелинейный элемент должна рассматриваться как НС.
Иногда НЭ специально вводят в АСУ для придания ей новых свойств. Такие «искусственные» нелинейности могут обеспечить, например, ограничение некоторых координат и повысить качество управления. Убедимся в этом на следующем примере.
Рассмотрим реакцию простейшей следящей системы на скачкообразный входной сигнал g(t) = 1(t) при разных значениях коэффициента передачи (см. рис. 1.1).
При большом коэффициенте передачи переходной процесс в системе имеет резко колебательный характер (кривая у1(t)) со значительным перерегулированием и большим количеством колебаний, затягивающих время регулирования. В то же время у рассмотренного переходного процесса есть и достоинство: это – короткий временной интервал t1, в течение которого выходная величина достигает заданного значения g(t).
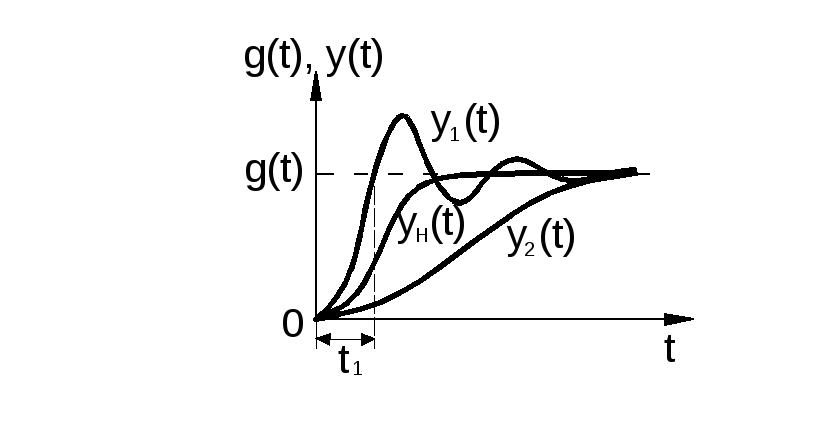
Рис. 1.1. Влияние НЭ на качество переходного процесса
При малом коэффициенте передачи переходной процесс в системе протекает апериодически (кривая у2(t)) без перерегулирования. Единственный недостаток состоит в том, что время регулирования очень велико.
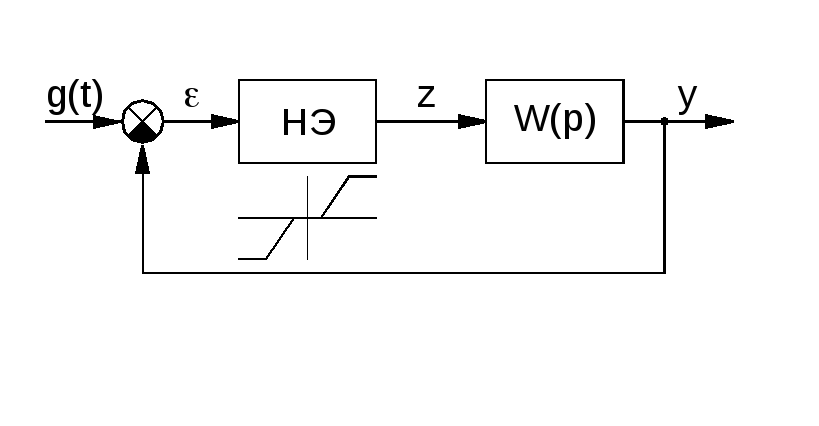
Рис. 1.2. Включение «искусственного» НЭ в контур регулирования
Анализ показывает, что как при большом, так и при малом коэффициенте передачи, система работает недостаточно хорошо. Идеальным было бы объединить достоинства обоих вариантов. Если бы система имела максимальный коэффициент передачи при больших рассогласованиях = g – y, а по мере уменьшения величины рассогласования уменьшала его, то можно было бы с одной стороны существенно ускорить переходной процесс, а с другой – убрать нежелательные перерегулирование и колебательность, защитив исполнительный механизм от перегрузок (кривая ун(t)). Можно ли создать такую систему? Оказывается – можно. Для этого следует включить в контур регулирования НЭ с соответствующей характеристикой (см. рис.1.2).
Под характеристикой НЭ понимают зависимость, устанавливающую связь между его входом и выходом. Из всего многообразия характеристик НЭ на практике чаще всего используют лишь несколько типовых разновидностей.