

36.Основные элементы структуры ртк
Роботизированный технологический комплекс – совокупность технологического оборудования (в них размещают материалы, заготовки и средства воздейств. на них Прим.: литейные машины, прессы, станки), промышленного робота (устр. из манипулятора и системы управления, которое выполняет различные производственные системы) и средств оснащения, способные работать автономно.
Структурная
схема РТК 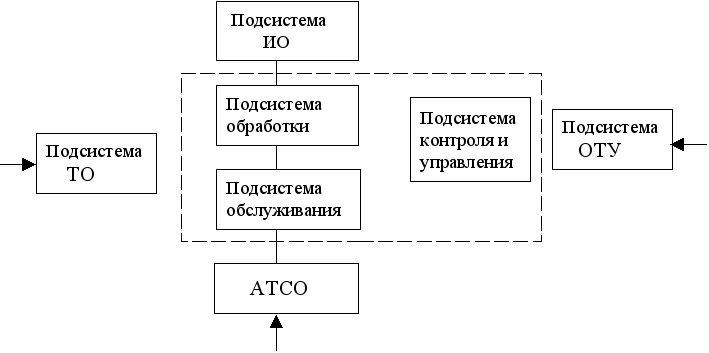
Подсистема обработки – формируется на основе технологического оборудования, модернизированного для взаимодействия с ПР.
Подсистема обслуживания – формируется на основе устройств для размещения заготовок на входе в РТК, межоперационных транспортирующих устройств и накопителей, устройств приема деталей, а также ПР.
Подсистема контроля и управления – состоит из комплекса программ, средств контроля измерений, регулирования вычислений, логического управления, регистрации и аварийной защиты. Подсистема оснащена датчиками, которые осуществляют вышеназванные функции.
Сложные РТК помимо названных подсистем могут иметь дополнительные подсистемы:
Подсистема инструментального обеспечения;
Подсистема технического обслуживания;
Подсистема организационно – технического управления;
Автоматизированное транспортно – складское обеспечение.
37.Системы группового управления
Под групповым управление оборудованием понимают взаимодействие в группе оборудования на уровне связи и синхронизации работы программ числового управления. При этом задачу координации управления движущ. объектами назыв. роботами. При групповом управлении(ГУ) оборудов. проблема организ. взаимосвязи функционирования различных устройств комплекса закл. в сложности программир. и синхрониз. их работы. Сложность программир. и синхрониз.опред. разнородностью обработки данных в СГУ оборудованием, что требует определ. стандартизации процедур обработки и передачи данных. Передача данных в производственных системах между ЭВМ различных уровней осуществляется на основании протокола определяющего структуру передачи, временные характеристики, коди формат передачи данных. Помимо согласования физических параметров интерфейса, необх. соглас. пар.-ры на уровне инф. взаимодействия. С этой целью в СУ исп. устройства выполн. функции промежут. хран. данных, связи с оператором, регестрац. рабочих пар-ров и т. д. Иными словами строятся локальные сети ЭВМ. Один из подходов построения СГУ оборуд. основывается на использовании контроллеров ГПМ и связыв. их между собой локал. вычислит.сети. Выбор и синхронизация программ работы оборудования в распред. СГУ основаны на реализации функций логич. управления. При реш. 2 класса задач:
- синхрониз. последовательности работы оборудования
- комбинатор.управление работой оборудования связ. с анализом сост. системы, проверкой условий и выбором действий.
Решение этих задач привело к разработке спец. проблемно-ориентир. языков кот.называются «Контроллер» и «Координатор». ГУ роботами предст. собой координированное управление движением, позволяет манипулятору уклонятся от столкновений друг с другом или с препятствиями при выполнении функциональных задач. Основным подходом решения задачи автоматического уклоненияявл. геометрического моделирования. Оно позволяет визуализир. движение каждого робота в 3-х мер.простр.Решение задачи автоматического уклонениясвяз. с реш. 2-х подзадач:
- планирование траекторий
- программирование движений
Для решения 1-й задачи исп. методы глобал. и локал. планирования траектории. Глобал. планир. осущ. для всей рабочей зоны роботов, локал. планир. характерно для текущ. положения каждого робота.
Методы программирования движений:
- программир. движений offline - 1
- программир. движений online(в реж. реального времени) - 2
Реж. 1предусм. планирование до начала движения(исп.-ются методы глобал. планир.).
Реж. 2сводится к прогнозированию запретных зон и последов. планирование траекторий попадания в запретные зоны(исп.-ются методы локал. планир.).
Наиб.часто для решения задачи в режиме 2исп. метод иерархического нелинейного ГУ:
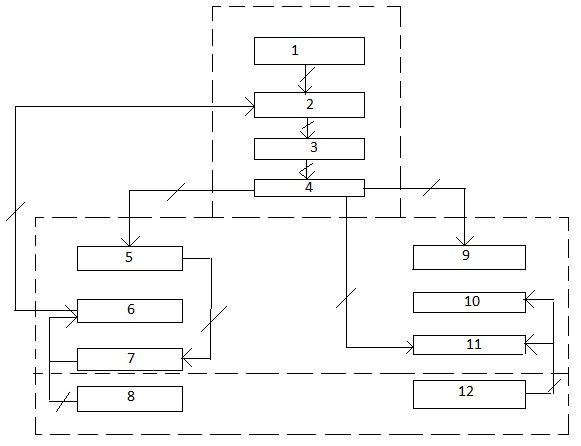
1)желаемые траектории; 2)определение области сталкновений; 3)выбор стратегии управления; 4)вычисл. скорректированной траектории; 5)и9)преобразование в неподвижную систему координат робота1 и робота2; 6)и10)преобразование в неподвижную систему координат; 7)и11)нелинейное управление; 8)и12) робот 1 и робот 2.
Осн. элементом структуры является координатор 1, кот.автом. формирует уклонение одного из роботов, при назначенном приоритете другому роботу. Блок детекции области столкновений 2 выявляет существенные области столкновений, если область столкновения отсутсвует, то сигналы определяющие желаемые траектории непосредственно исп. для управления приводами роботов.