

1 Расчет коэффициентов усиления исходя из заданного значения добротности.
2. Синтез следящей САУ методом последовательной оптимизации контуров.
3. Блок – схема управляющего устройства следящей САУ
4. Синтез следящей САУ методом модального управления.
5. Комбинированная позиционная САУ(позиционные у с переменно структурой)
6. Дискретные САУ
7. Дискретное преобразование Лапласса,Z-преобраз,D-преобразования
8. Основные свойства дискретного преобразования Лапласа
9. Передаточная функция одноконтурной импульсной САУ
10. Передаточная функция двухконтурной импульсной САУ
11. Переход от непрерывной передаточной функции к дискретной
12. Устойчивость импульсных САУ
13. Критерий устойчивости Шуркона
14. Частотный критерий Найквиста
15. Синтез ЦУУ.
16. Расчет динамических характеристик импульсных САУ.
17. Синтез последовательного дискретного корректирующего устройства.
18. АЛГОРИТМ РЕАЛИЗАЦИИ ДИСКРЕТНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА НА ЭВМ
19. СИНТЕЗ НЕПРЕРЫВНОГО ПОСЛЕДУЮЩЕГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
20. Нелинейные САУ. метод гармонической линеаризации
21. Аналитический метод определения автоколебаний для систем с однозначной нелинейностью
22. Метод Гольдфорба или графо-аналитический метод определения амплитуды автоколебаний
23. Вынужденные колебания в релейных САУ
24. Система экстремального управления (СЭУ)
25. Принципы построения систем экстремального управления
26. СЭУ с непрерывным поиском сигнала
27. Динамика систем экстремального управления
Динамика систем для безынерционного ОУ
28. Системы оптимальные по быстродействию (СОПБ)
29. Оптимальные по быстродействию траектории движения.
30. Построение разомкнутых САУ. Определение момента переключения методом сливания траектории.
31. Построение замкнутых систем оптимальных по быстродействию.
32. Квазиоптимальное управление.
33. Самонастраивающаяся система управления. Принципы построения самонастраивающихся САУ.
34. Применение ортогональных фильтров для построения самонастраивающихся систем
1)Расчет коэффициентов усиления исходя из заданного значения добротности.
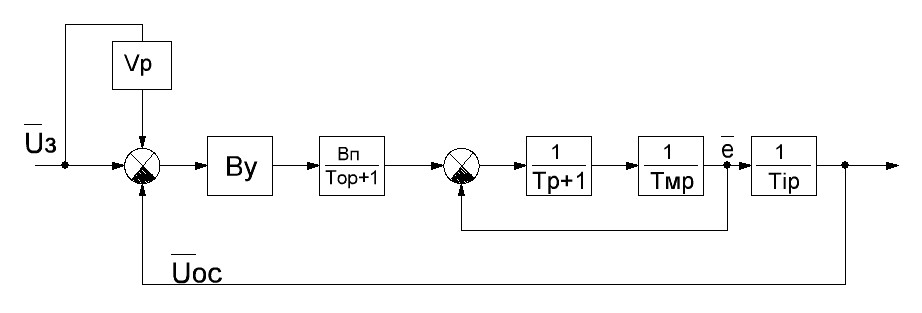
Структурная схема комбинированной САУ:
![]() и
и ![]()

Для системы стабилизации в установившемся режиме p=0.
Для
следящей системы p≠0,
т.к. ![]() является квазирежимом.
является квазирежимом.
![]() – квазирежим.
– квазирежим.
![]() – коэффициент, за счет его можно получить
любое значение добротности при
ограниченном
– коэффициент, за счет его можно получить
любое значение добротности при
ограниченном ![]() .
.
![]() и
и ![]()
![]()
В
квазиустановившемся режиме ![]()
![]() ;
;
![]()
![]()
![]()

Зная
![]() можно определить необходимый коэффициент
усиления
.
можно определить необходимый коэффициент
усиления
.
Чем больше коэффициент усиления, тем выше значение . Для получения высокого значения требуется большое значение коэффициента усиления системы.
Для
![]() необходимо
необходимо ![]()
Большие
значения коэффициента усиления
нежелательны, т.к. это приводит к снижению
помехозащищенности. Поэтому на практике
выполняют комбинированные системы. В
комбинированную систему вводится ![]() .
.
![]()

![]()
![]()
![]()
![]()
Если
![]() ,
то
,
то
2)Синтез следящей сау методом последовательной оптимизации контуров.
Структурная схема:

III – астатический контур регулирования скорости.

![]()
Найдем
![]() и
и ![]()


При расчете регулятора положения делаются допущения заключающиеся в том, что коэффициент при старшей степени равен нулю.

![]()

![]()
![]()
Быстродействие контура положения в 2 раза ниже астатического контура скорости.
Необходимо определить
![]()
![]()
![]()
![]()
![]()
3)Блок – схема управляющего устройства следящей сау.
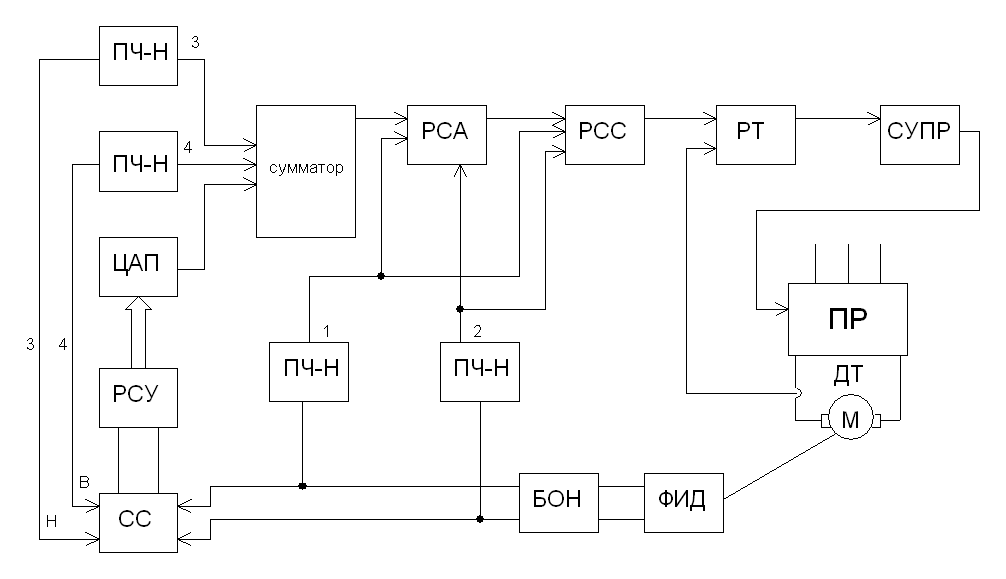
СС – схема синхронизации.
РСЧ – реверсный счетчик.
ЦАП – цифро-аналоговый преобразователь.
РСА – астатический регулятор скорости.
РСС – статический регулятор скорости.
РТ – регулятор тока.
СУПР – система управления преобразователем.
ФИД – фото - импульсный датчик положения (линейные и круговые, с различной разрешающей способностью).
БОН – блок определения направления вращения.
ФИД – имеет 2 входа, с которых системы сдвинуты на 900. В зависимости от направления вращения системы с одного выхода опережает со второго выхода.
ПЧ-Н – преобразователь частота-напряжение.
Частота следования импульсов зависит от скорости вращения, т.е. системы с ПЧ-Н которые включены на выход БОН пропорциональна частоте вращения двигателя. Эти преобразователи служат для ограничения обратной связи по скорости.
На вход СС поступают задающие импульсы с выхода интегратора. Число импульсов пропорционально необходимому углу поворота, а частота импульсов определяет скорость, при которой происходит отработка заданного перемещения.
Для организации обратной связи с V(ню), чтобы система была комбинированной служат ПЧ – Н 3 и 4, преобразуют частоту в напряжение.
ДТ – датчик тока.
СС служит для исключения одновременно подачи импульсов на вход сложения и вычитания реверсивного счетчика, т.к. при одновременно подаче импульсов происходит переполнение счетчика.
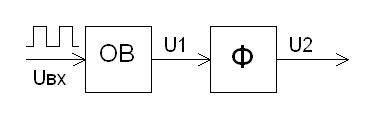 ПНЧ
может быть построен по нескольким
принципам. Например:
ПНЧ
может быть построен по нескольким
принципам. Например:
Ф – фильтр.
ОВ – одновибратор. На выходе получаем импульс калиброванный по амплитуде и по импульсу частоты длительности.

В зависимости от частоты изменяется скважность, а фильтр служит для выделения среднего значения напряжения.
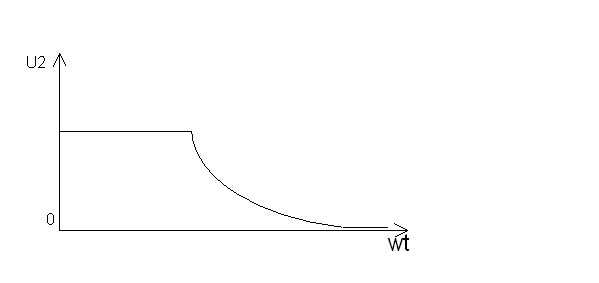
При заполнении высокой частотой, частота импульсов пропорциональна частоте. Для этого необходим счетчик. На практике используют комбинированный метод измерения. На большой частоте необходимо использовать 1-ый метод, а на малой – 2-ой метод измерения. Чем больше импульсов вкладываются в один период, тем точнее измерения.