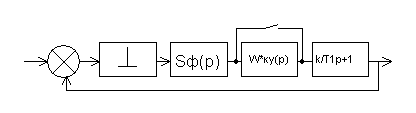
17)Синтез последовательного дискретного корректирующего устройства.
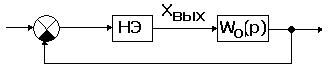
Структурная схема имеет вид :
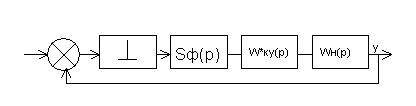
Дискретное корректирующее устройство должно работать с синхронным импульсным элементом.
![]() -
передаточное число с корректируемой
системой.
-
передаточное число с корректируемой
системой.
![]()
![]() -
желаемая функция коррект. Системы
(разомкнутой).
-
желаемая функция коррект. Системы
(разомкнутой).
Рассмотрим пример :

 k=20;
T1=0.1c;
T2=0.2c;
k=20;
T1=0.1c;
T2=0.2c;
Без корректирующего устройства система является неустойчивой.
Рассчитать корректирующее устройство системы (чтобы система была устойчивой).

![]() ,тогда
,тогда
 -
система устойчива
-
система устойчива

![]()
![]()
![]()
![]()
Как для непрерывных систем так и для импульсных существует закон физической реализуемости звеньев.
 ,
,
![]()
 ,
,
В нашем случае (из примера) m=n=1.
18)Алгоритм реализации дискретного корректирующего устройства на эвм

Домножаем
числитель и знаменатель передаточной
функции на ![]() ;
;

![]()

![]()
![]()
![]()
Уравнение на i-ом интервале будет равным:

Рассмотрим это все на примере:
Дана передаточная функция корректирующего устройства:

m=2 n=1
![]()

![]() -
опережение на один период квантования
-
опережение на один период квантования
![]() -
запаздывание на один период квантования
-
запаздывание на один период квантования
![]() -
функция является физически нереализуема,
т.к. составляющая
-
функция является физически нереализуема,
т.к. составляющая ![]() является физически нереализуема.
является физически нереализуема.
b1=0.056
a1=1
a0=-0.95
b0=-8*![]()
![]()

19)Синтез непрерывного последующего корректирующего устройства
![]()
![]()
![]()



ПРИМЕР:
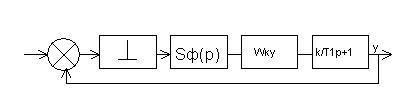
K=20 T1=0.1c T=0.2c Wky=1
При отсутствии корректирующего устройства система неустойчива (т.е. Wку=1).

![]() – реально-диф. звено
– реально-диф. звено
![]() – инерц. звено
– инерц. звено
20)Нелинейные сау. Метод гармонической линеаризации
Структурная схема нелинейной САУ с 1-й нелинейностью имеет вид:
Разложив в ряд Фурье выходной сигнал получим:
![]()
![]() -постоянная
составляющая;
-постоянная
составляющая;
![]() и
и
![]() -амплитуды
синусоидальных и косинусоидальных
составляющих 1-й гармоники;
-амплитуды
синусоидальных и косинусоидальных
составляющих 1-й гармоники;
![]() -частота
первой гармоники;
-частота
первой гармоники;
![]() и
и
![]() -
для 2-й гармоники и т.д. ;
-
для 2-й гармоники и т.д. ;
Для анализа нелинейных САУ широко используется метод гармонической линеаризации . Этот метод основан на том , что линейная часть является фильтром для высокочастотных составляющих , т.е. может пропускать 1-е гармоники.
Реальные ОУ всегда обладают инерционностью, это будет как минимум инерционное звено 1-го порядка.
![]() (66)
(66)
![]() (67)
(67)
Из (67) можно записать:
 (68)
(68)
,где А- амплитуда сигнала на входе в НЭ.

![]() (69)
(69)
Получаем линейное ДУ, описывающее НУ.
определим передаточную функцию НЭ:

![]() (70)
(70)
Метод гармонической линеаризации широко используется для анализа релейных САУ.
В релейных САУ возникают незатухающие автоколебания, которые характеризуются частотой и амплитудой.
Чем меньше амплитуда колебаний, тем система более качественная.
Релейные системы- это системы, у которых один сигнал квантуется по уровню.

Релейная система на практике используется для управления высокоинерционными объектами. Это как правило объекты, где протекают тепловые процессы.
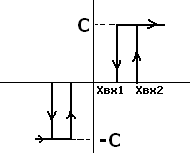
Все нелинейные объекты делятся а однозначные и неоднозначные.
Однозначный- это когда 1-му значению входного 1-но значение выходного
Неоднозначный- когда одному входному соотв. несколько выходных
В учебниках по ТАУ для различных типов нелинейности приведены значения b(A) и q(A).
Однозначные элементы
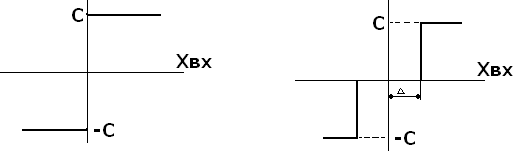
b(A)=0;
![]() ;
;
 ;
;
Неоднозначные Элементы