

4)Синтез следящей сау методом модального управления.
Возможно несколько вариантов построения системы следящей САУ.
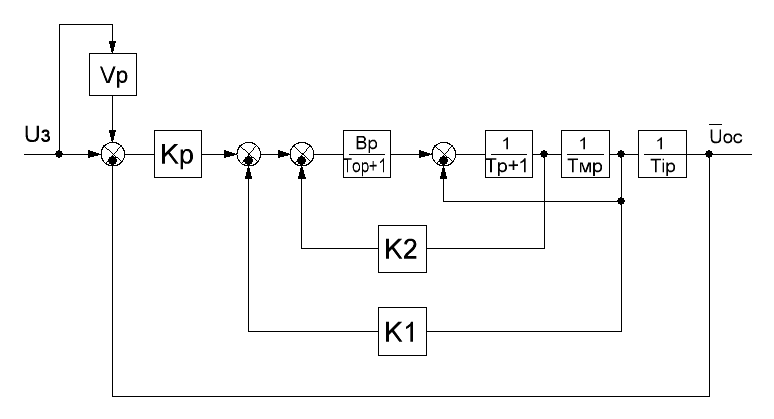
Структурная схема САУ:

В
результате синтеза мы должны
определить![]() ,
,![]() и
и ![]() ,
а также коэффициент
исходя из добротности.
,
а также коэффициент
исходя из добротности.


![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
![]()
![]() – по Батерворту.
– по Батерворту.
Приравняем коэффициенты при одинаковых степенях p.
![]()



Определяем исходя из заданного уравнения добротности.
С
учетом того что в квазиустановившемся
режиме ![]() и
получим:
и
получим:
![]() :
:
![]() и
и
![]()
![]()
![]()
![]()
Недостатком такой системы является то, что добротность будет зависеть от нагрузки ЭД. При расчете коэффициента нагрузка не учитывается.
Другой вариант схемы, построенной методом модального управления
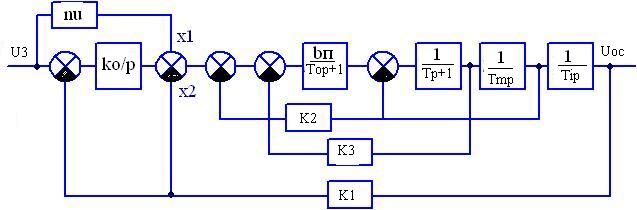
Характер уравнений будет таким же как и для позиционной САУ. Поэтому коэф. Ко, К1, К2 и К3 рассчитываются по тем же формулам.
Коэф. nu целесообразно выразить равным коэф. К1. nu=К1
Недостатком данной схемы является то, что для ее реализации потребуется 2 реверсивных счетчика: 1) Uз-Uос; 2) х1-х2.
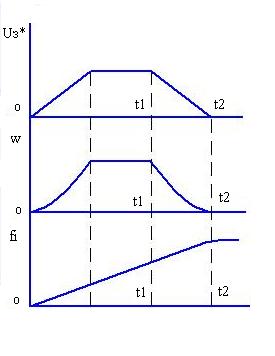
5)Комбинированная позиционная сау(позиционные у с переменно структурой)
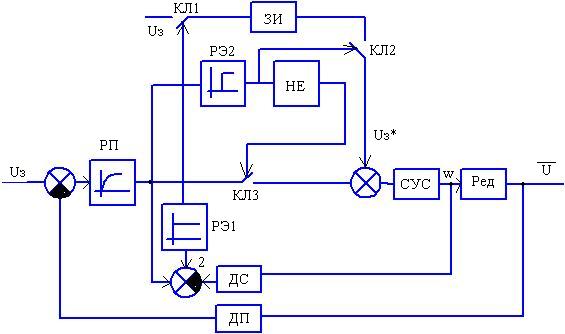
РП- нелинейый параболический регулятор положения
РЭ- релейные элементы
КЛ- управляемые ключи
ЗИ- задатчик интенсивности, преобразующий ступенчатый сигнал в линейно изменяющийся
СУС- система управления скоростью
Ред- редуктор
ДП- датчик положения
ДС- датчик скорости
Рассмотрим отработку большого перемещения
При подаче Uз регулятор положения приходит в насыщение
Достоинством такой схемы является то, что она более удобна в наладке. Для начала настраивается система управления скоростью, а затем подбирается зона нечувствительности РЭ2.
6)Дискретные сау
На ряду с непрерывным способом передачи сигналов существует дискретный. Отличительной особенностью дискретного сигнала от непрерывного является то, что дискретный сигнал не может принимать любые значения в любой момент времени, а непрерывный это может.
Дискретизация сигнала может быть осуществлена:
по времени;
по уровню;
и по времени и по уровню, т.е. комбинированно.
Квантование сигнала по времени.
Квантование сигнала по времени заключается в замене непрерывного сигнала решетчатым, амплитуда которого равна значению непрерывного сигнала квантованию по времени.
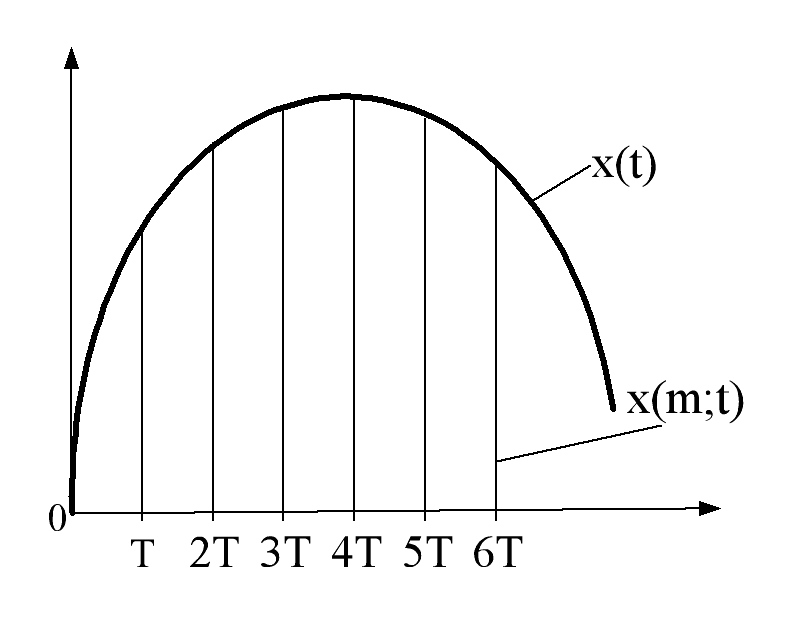
![]() -
номер шага квантования.
-
номер шага квантования.
![]() -
частота квантования.
-
частота квантования.
Чем выше частота квантования, тем точнее дискретный сигнал соответствует непрерывному.
Для
передачи сигнала без потерь согласно
теореме Котельникова частота квантования
должна быть выше частоты непрерывного
сигнала,
![]() .
.
Квантование сигнала по уровню.
Квантование сигнала по уровню заключается в том, что дискретный сигнал может принимать только значения соответствующие разрешенным уровням.
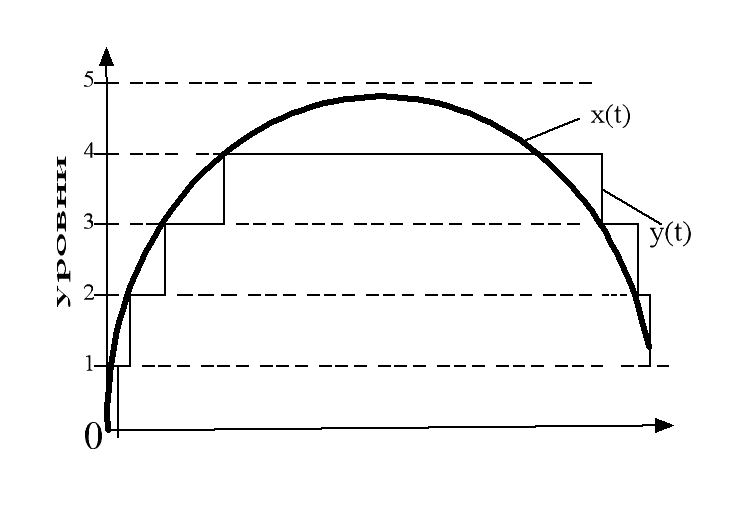
Расстояние между соседними уровнями называется шагом квантования.
Чем меньше шаг квантования, тем точнее дискретный сигнал соответствует непрерывному.
П



 римером
может служить фотоимпульсный датчик
пополнения (см. рис.):
римером
может служить фотоимпульсный датчик
пополнения (см. рис.):
1 оборот = 100 импульсов;
шаг
квантования =
![]() = 3,60.
= 3,60.