

25)Принципы построения систем экстремального управления
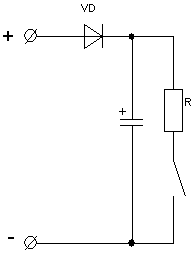
СЭУ с запоминанием экстремума
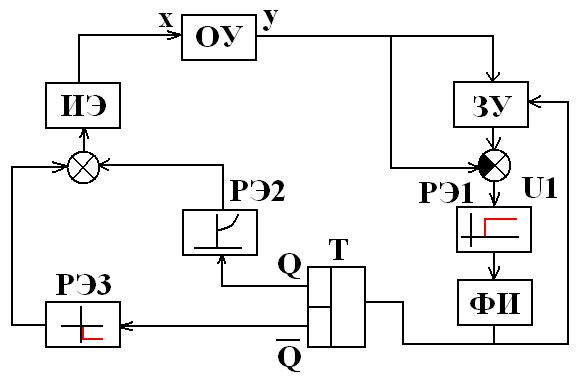
ОУ – объект управления
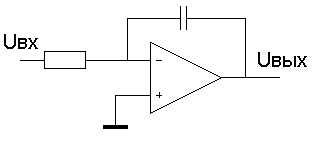
ИЭ – исполнительный элемент (интегратор)
РЭ – релейный элемент
ФИ – формирователь импульсов
Т – триггер со счетным входом
РЭ1 – сигнал положительный
РЭ3 – сигнал отрицательный
|
|
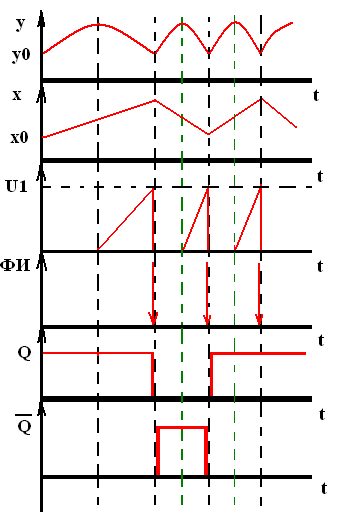
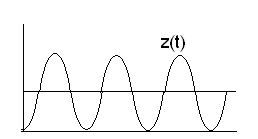
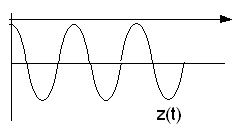
Запоминающее устройство выполнено таким образом, что при увеличении входного сигнала, входной сигнал равен выходному, и при переходе точки экстремума на выходе максимальное значение запоминается.
|
|
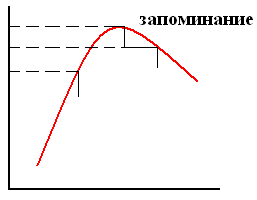
Начиная с точки t1 на выходе первого сумматора появляется сигнал, который нарастает.
2 6)Сэу с непрерывным поиском сигнала
![]()
![]()
U
ГГК - генератор гармонических колебаний;
Ф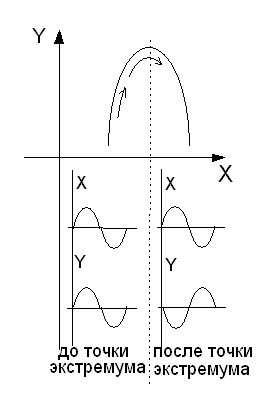 1,
Ф2,Ф3 – фильтры; Ф1- узкополосный фильтр,
служит для выделения одной частоты; БУ
– блок умножения;
1,
Ф2,Ф3 – фильтры; Ф1- узкополосный фильтр,
служит для выделения одной частоты; БУ
– блок умножения;
ИЭ – исполнительный элемент;
ОУ – объект управления;




![]()
![]()
27)Динамика систем экстремального управления
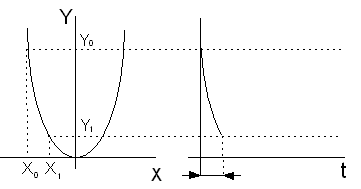
Динамика систем для безынерционного ОУ
![]()
V - скорость изменения входной величины.
![]() -
ширина зоны нечувствительности.
-
ширина зоны нечувствительности.
Необходимо определить время выхода системы в точку экстремума.
- время выхода системы в зону экстремума.
Время
τ зависит от начального момента
![]() и от скорости изменения координаты.
и от скорости изменения координаты.
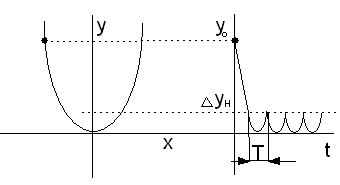



Чем выше скорость изменения входной величины, тем выше частота. Чем больше зона нечувствительности, тем ниже частота.
Процесс периодического нагружения и восстановления экстремума называется рыскание. Определим потери на рыскание.

Потери не зависят от скорости изменения входной координаты х, они определяются только зоной нечувствительности релейного элемента.
28)Системы оптимальные по быстродействию (сопб)
Задача создания оптимальных по быстродействию систем была использована при разработке следящих САУ, автоматических компенсаторов, а так же систем управления станков и т.д.
Данная система была впервые рассмотрена Фельдбауном в 1953-1956гг. Он впервые ввёл понятие оптимальных систем по быстродействию и сформулировал общую задачу нахождения фазовых траекторий и теорему об n-интервалах, где n – порядок объекта управления.
В 1956г академик Понтрягин сформулировал принцип максимума, который наз. Принцип максимума Понтрягина. Этот принцип явился общей теоретической базой при разработке и исследовании систем оптимальных по быстродействию.
Для уменьшения времени потерь переходного процесса следует применять принцип форсировки процесса по средствам увеличения управляющего сигнала управления.
Рассмотрим следующий пример:
Имеется генератор постоянного тока.
![]()

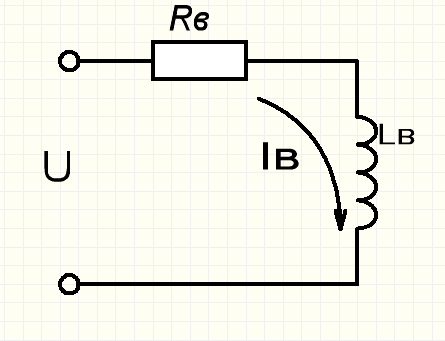
Сократим время переходного процесса
1 ) Необходимо ввести добавочное сопротивление
![]()
![]()
![]()
Такой метод является не целесообразным и имеет ряд недостатков:
1
появляются
дополнительные потери энергии
![]()
2 необходимо иметь источник 2-ой мощности т.е. дополнительные источник энергии.
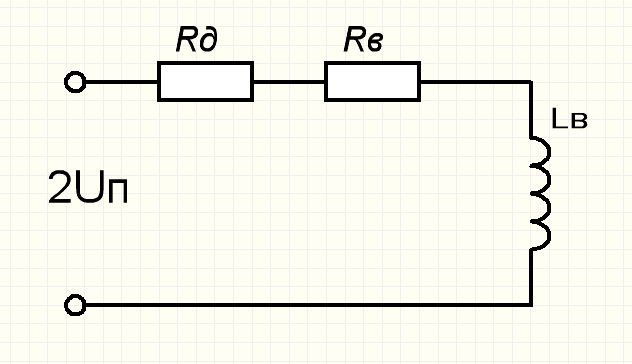
2) Заключается в форсировании: подаётся второе напряжение без введения добавочного сопротивления
![]()
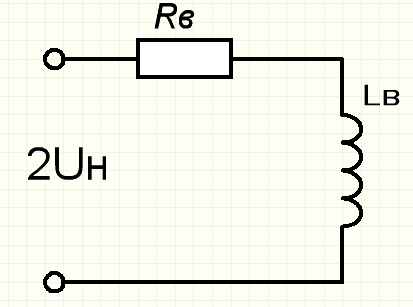
![]()
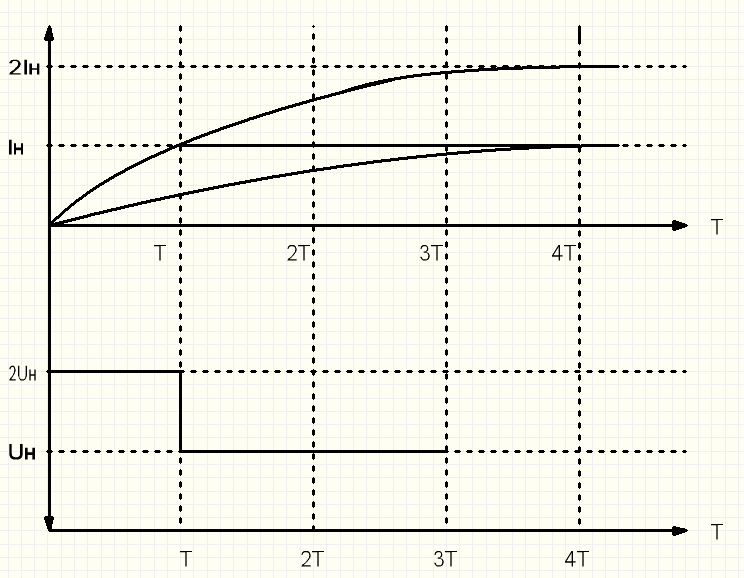
Для данного способа сокращения времени переходного процесса не требуется 2-ой источник мощности, т.к. напряжение подаётся кратковременно.