

21)Аналитический метод определения автоколебаний для систем с однозначной нелинейностью
Основан на критерии устойчивости Михайлова

устойчива
неустойчива
на границе устойчивости
 ;
;

Наличие положительных значений w(р) и q(A) удовлетворяющие приведенную выше систему уравнений яв-ся необходимыми, но недостаточными условиями устойчивости автоколебаний
ПРИМЕР:
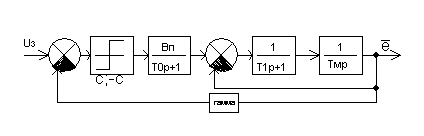
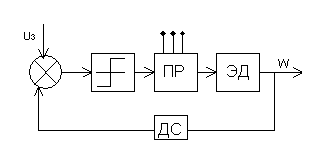
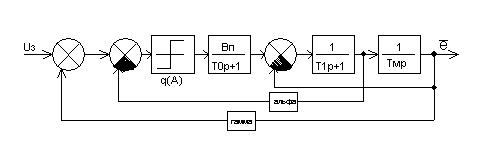
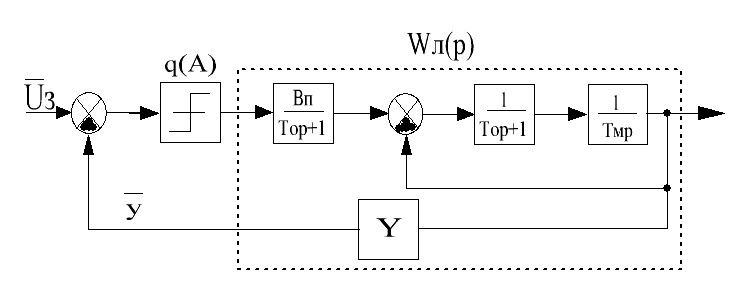
Лин. система стабилизации скорости ДПТ:
Найти
![]()
Определим параметры и устойчивость автоколебаний:
![]()
Для улучшения качества релейных систем необходимо ОС по выходным координатам необх. использовать ОС по промежуточным координатам (току)
Проверим соблюдение условий устойчивости:

Условие устойчивости соблюдается!
Введем ОС по току и скорости




При введении ОС по току амплитуда автоколебаний уменьшается
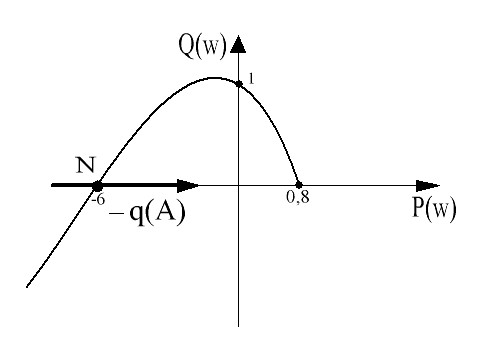
2 2)Метод Гольдфорба или графо-аналитический метод определения амплитуды автоколебаний
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
:
:
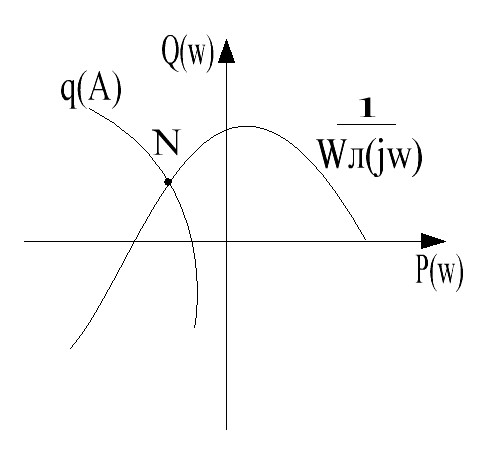
Где N – это искомое решение(дает искомое решение)
Рассмотрим пример:
![]() :
:![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]()
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]()
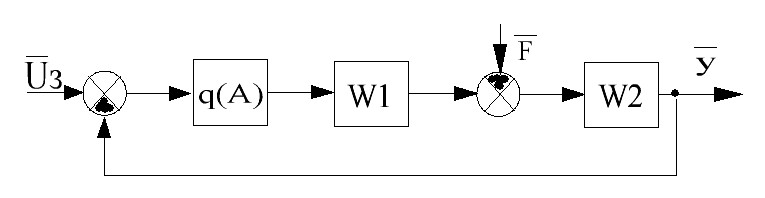
23)Вынужденные колебания в релейных сау
Пусть структурная схема имеет вид:
q(A)-передаточная функция релейного элемента.
Возмущающее воздействие изменяется по гармоническому закону:
![]() :
:
![]()
Если в системе возникают колебания с частотой возмущающего воздействия, то это явление называется –явлением синхронизации или “захвата”. Т.к. система не линейная, то нельзя применить принцип суперпозиции, т.е. нельзя суммировать разные по знаку колебания.
Явление синхронизации не желательно, т.к. это приводит к возрастанию амплитуды автоколебаний и выходной координаты.
Считаем,
что явление захвата произошло тогда:
![]() ,
,
Выразим возмущающее воздействие через выходную координату:
![]() :
Продиферинцируем это выражение:
:
Продиферинцируем это выражение:
![]()
![]() :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
Из структурной схемы запишем операторное уравнение, а затем и передаточную функцию.
![]() :
:
![]() :
:
 :
:
![]() :
:
![]() :
:
![]() :
:
![]() :
:
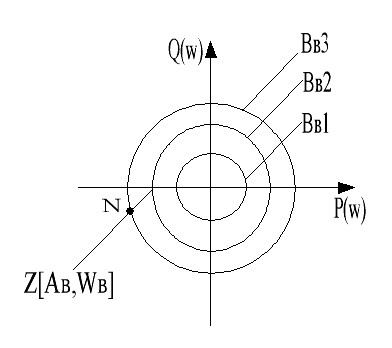
Зная
частоту wв
и задаваясь значением Авых,
строиться зависимость
![]() .
.
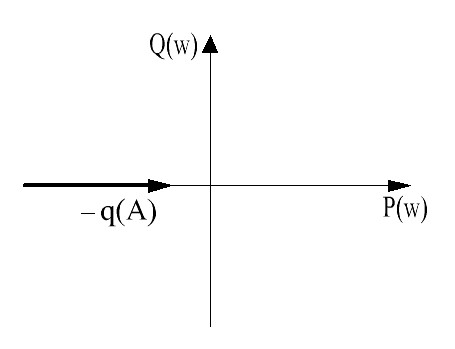
Точка N- искомое решение.
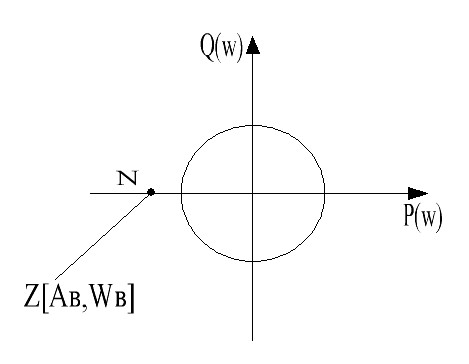
![]()
На этом рисунке, явление “захвата” отсутствует.
Чем больше амплитуда возмущающего воздействия, тем больше вероятность возникновения “захвата”.
24)Система экстремального управления (сэу)
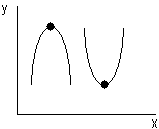
Системы экстремального управления составляют особый класс. Они могут быть построены только для объектов, в которых выходная величина имеет экстремальную зависимость от входной. Целью функционирования СЭУ явл. Поддержание режима работы объекта управления в точке экстремума.
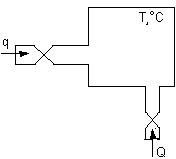
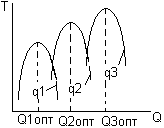
q-подача топлива, Q – подача воздуха
Для каждой подачи топлива существует оптимальная подача воздуха, при которой температура в печи максимальная. Из приведенных графиков видно что для печи можно построить систему стабилизации заданной температуры, которая обеспечивает максимальный расход топлива. Блок-схема системы стабилизации имеет вид:
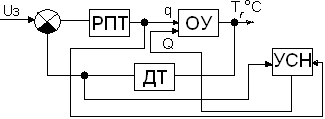
РПТ-регулятор подачи топлива
УСН-устройство самонастройки(определяет расход воздуха)
Д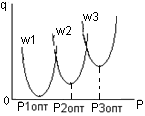 Т-датчик
топлива
Т-датчик
топлива
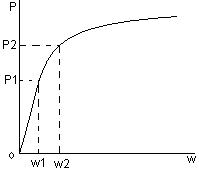
Рассмотрим СЭУ двигателя автомобиля:
w3>w2>w1, w- частота вращения дизеля
q-
расход топлива
Б лок
– схема трансмиссии большегрузного
автомобиля(БЕЛАЗа):
лок
– схема трансмиссии большегрузного
автомобиля(БЕЛАЗа):
ДС-датчик скорости
НБ-нелинейный блок
РМ-регулятор мощности
На валу двигателя находится генератор, ОВ которого питается от отдельного преобразователя ПР. Uгенер. подается на ЭД, который непосредственно соединен с колесом машины. Изменяя U, подводимое к якорю ЭД можно тем самым изменять скорость машины.
Минус: необходим дополнительный генератор к ЭД.
Плюс: упрощается коробка передач и не нужен корданный вал.
Экономически обосновано применение эл. трансмиссии в машинах более 25 тонн.
На выходе НБ сигнал пропорциональный заданному значению дизеля.
БУ – блок умножения служит для получения сигнала пропорционального мощности двигателя.
ОВГ – обмотка возбуждения генератора, благодаря ей поддерживается заданная мощность дизеля( за счет изменения тока в ОВГ)
Такая система точно не обеспечивает работу в точках экстремума.