Добавил:
Upload
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:tau_shpory.doc
34)Применение ортогональных фильтров для построения самонастраивающихся систем:
Если имеется передаточная функция объекта:
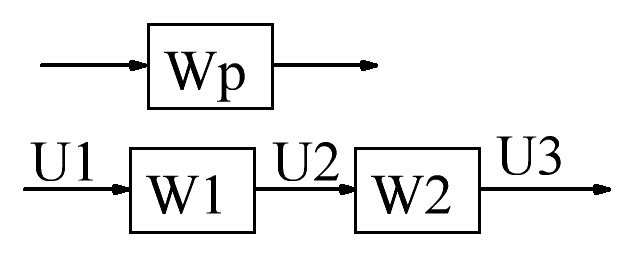
Фильтр выполняет роль последовательного корректирующего устройства
![]() -
Желаемая передаточная функция разомкнутой
системы
-
Желаемая передаточная функция разомкнутой
системы
![]() -
Передаточная функция фильтра
-
Передаточная функция фильтра
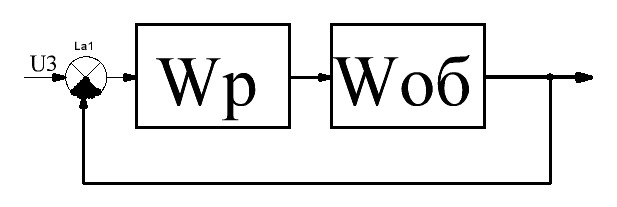
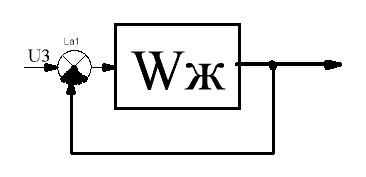
Тогда получиться следующая схема:
![]() --
-- --Упрощенная
схема:
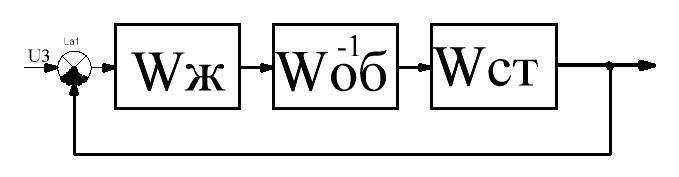
--Упрощенная
схема:
![]()
-
------------(92)
-------------(93)-
![]()
Для того, чтобы система была физически реализуема необходимо, чтобы r + m=n:
 --------------------------(94)
--------------------------(94)
Для
реализации данного фильтра выражение
(94) домножаем на
![]() :
:

![]()
![]()
Разделим
правую и левую часть на
![]() ,
получим:
,
получим:
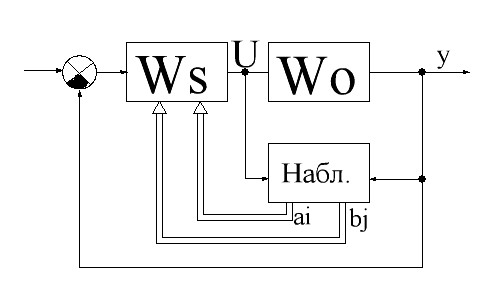
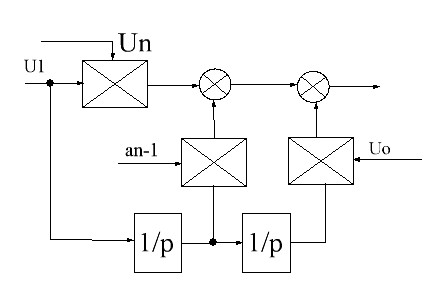
Получаем следующую схему:

Блок-схема адаптивной системы будет иметь следующий вид: