

32.Принципы построения плк
ПЛК – специализированное микропроцессорное устройство со встроенным аппаратным и программным обеспечением, которое используется для выполнения функций управления технологическим оборудованием. Доступны для программирования неспециалистом в области информатики и предназначены для управления последовательными логическими процессами в условиях промышленной среды в реальном масштабе времени.
Структуру ПЛК можно представить так
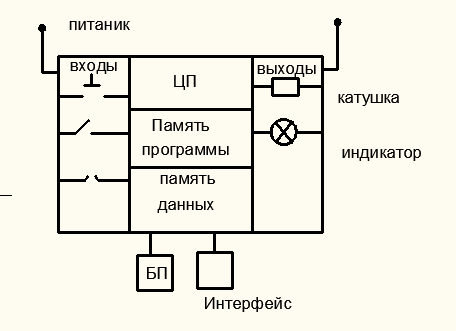
Центральный процессоросуществляет логику работы системы, обрабатывает команды и управляет всеми внутренними элементами контроллера (входами, выходами ,счетчиками, таймерами, регистрами и тд.). В ПЛК имеется внутренние реле, они называютсямаркерами. Они предназначены для обеспечения работы программы, так как являются единицей хранения информации. На ряду с обычными маркерами существуютслужебные, несущие функциональную нагрузку, назначение каждого маркера приводится в доукментации(М-обозначается)
Счетчикипредназначены для различного счета. Отдельно используются высокоскоростные счетчики, они имеют свою нумерацию.
Таймеры предназначены для установки времени задержки включения\выключения. Различаются в основном шагом отсчета времени и точностью.
Выходыобеспечивают связь с внешними устройствами, т.е обеспечивают
включение\выключение исполнительных механизмов. Могут быть релейные и полупроводниковые(тиристорные и симисторные).
В процессе работы ПЛК непрерывно опрашивает текущее состояние входом и в соответствии с требованиями производственного процесса изменяет состояние выходов . Время одного полно прохода от начало до конца называется временем цикла или скан
Контролеры(ПЛК) можно разделить на компактные, модульные, встроенные.Контактные- в одном корпусе содержат все основные элементы(входы\выходы,БП, процессор).Модульные– перечисленные элементы могут встречаться в виде отдельных устройств(модуль ЦП, модуль входа и тд.), это позволяет при необходимости к одному процессору дополнительное число входов и выходов.Встроенныеявляются неотьемлемой частью аппарата машинного прибора, обычно монтируются в общий корпус оборудавания.
33.Особенности программирования плк
Общим из базовых языков программирования ПЛК является язык релейно-контактных схем РКС. Последовательность действий при программировании следующая:
- Определить все составляющие оборудования в символах понятных для ПЛК, эти символы нормально замкнутые или нормальнорозамкнутые контакты.
-подключить источник питания
-задать выход в виде катушки, реле, пускателя и тд.
Стр-ру команды на РКС можно представить в следующем виде:

d– обработка двойного слова
mov– условное обозначение команды в немоническом виде
р – указатель
D0 – входные данные
D100 – выходные данные
К10 – постоянное число
Выход
-(У)-по этой команде контроллер изменяет состояние выхода с выкл на вкл.
В конце каждого командного блока должна стоять команда END
Команда логического умножения (AND)
-||-------||----( )— сигнал на выходе 1 если замкнуты оба вх контакта
x0x1y1
Команда отрицания логического умножения (ANI)
-||-------|/|----( )
x0x1y1
|
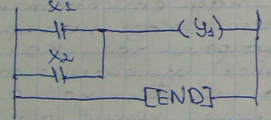
Команда логического сложения (OR)
|
Команда отрицания логического сложения
|

Команды управления по фронтам
-|↑|- LDPпо переднему фронту (фронт)
-|↓|- LDFпо заднему фронту (срез)
Команды установить/сбросить
Команда
RESETпреобладает надSET.
ПрименяетсяRESETдля
обнуления регистров и счетчиков.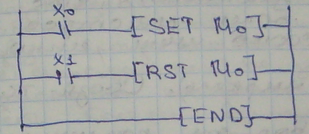
Команды инверсии
Инвертирует
состояние сигнала результата стоящей
впереди команды.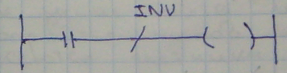
NOP– пустая строка без логических функций, м.б позднее использована для каких-либо команд, а также для задержки выполнения команды на один такт (очень короткая пауза).
END– окончание программы ПЛК и переход к началу программы. Последующие области программы не принимаются во внимание, после обработки командыEND,выполняется обработка выхода.