

Основные законы трения
1. Сила трения действует в касательной плоскости к поверхностям соприкасающихся тел и при движении направлена против относительного скольжения тела.
2. Статическая сила трения пропорциональна нормальной реакции,
![]()
3. Статическая сила трения не зависит от размеров трущихся поверхностей.
4.
Статический коэффициент трения (![]() )
зависит
от материала соприкасающихся тел,
физического состояния (влажности,
температуры, степени загрязнения и
т.д.) и качества обработки. (Законы трения
относятся к числу не очень точных. Обычно
наблюдаются от них значительные
отклонения. Например, при увеличении
продолжительности неподвижного контакта
соприкасающихся тел статический
коэффициент трения возрастает, так как
в месте контакта постепенно происходит
пластическое изменение
)
зависит
от материала соприкасающихся тел,
физического состояния (влажности,
температуры, степени загрязнения и
т.д.) и качества обработки. (Законы трения
относятся к числу не очень точных. Обычно
наблюдаются от них значительные
отклонения. Например, при увеличении
продолжительности неподвижного контакта
соприкасающихся тел статический
коэффициент трения возрастает, так как
в месте контакта постепенно происходит
пластическое изменение
поверхностей обоих тел и площади их соприкосновения увеличиваются. Следовательно, размеры трущихся поверхностей влияют на статический коэффициент трения, а значит и на силу трения).
После начала скольжения тела коэффициент трения несколько уменьшается и принимает значение динамического коэффициента трения f
Следовательно,

где
![]() – сила трения скольжения.
– сила трения скольжения.
Глава 5. Пространственная система сил
5.1. Сложение пространственной системы сходящихся сил. Условие равновесия
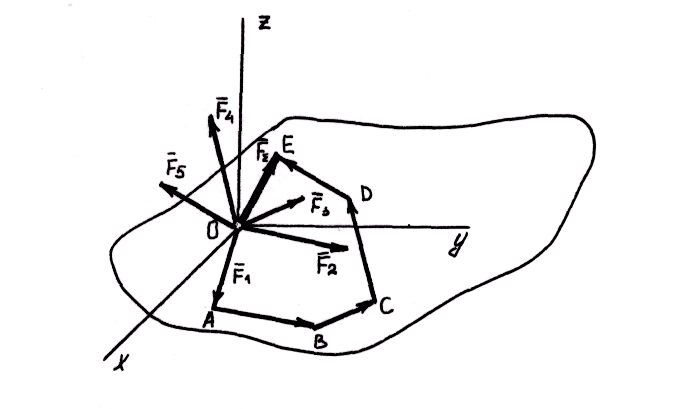
Система сил, линии действия которых расположены как угодно в пространстве, называется пространственной.

Если
к приложенным к точке А силам ![]() и
и
![]() .
добавить силу
.
добавить силу ![]() ,
не лежащую в плоскости П действия двух
первых сил, то получим простейшую (в
количественном отношении) пространственную
систему сходящихся сил. Определим
равнодействующую этих сил. Сначала
построим параллелограмм АВЕС на силах
,
не лежащую в плоскости П действия двух
первых сил, то получим простейшую (в
количественном отношении) пространственную
систему сходящихся сил. Определим
равнодействующую этих сил. Сначала
построим параллелограмм АВЕС на силах
![]() и
и![]() .
Его диагональ
.
Его диагональ
![]() .
.
Сложим
АЕ с силой ![]() и построим параллелограмм AEKD.
Его диагональ
и построим параллелограмм AEKD.
Его диагональ
![]() .
.
Это векторное равенство выражает правило параллелепипеда при сложении приложенных к точке трех сил, не лежащих в одной плоскости.
Параллелограмм
АВЕС образует одну из граней параллелепипеда,
в котором параллелограмм AEKD
является диагональным сечением, а
заданные силы
![]() ,
,![]() и
и![]() ребрами одного из его трехгранных углов.
Таким образом, равнодействующая
пространственной системы трех сил,
сходящихся в одной точке, приложена в
той же точке и равна по модулю и направлению
диагонали параллелепипеда, ребра
которого равны и параллельны заданным
силам.
ребрами одного из его трехгранных углов.
Таким образом, равнодействующая
пространственной системы трех сил,
сходящихся в одной точке, приложена в
той же точке и равна по модулю и направлению
диагонали параллелепипеда, ребра
которого равны и параллельны заданным
силам.

![]()
т.е. модуль равнодействующей трех сходящихся сил, расположенных в пространстве перпендикулярно друг другу, равен корню квадратному из суммы квадратов модулей этих сил.
Равнодействующая любого числа сходящихся сил, расположенных в пространстве, равна замыкающей стороне многоугольника, стороны которого равны и параллельны заданным силам (правило силового многоугольника).
Аналитическое условие равновесия пространственной системы сходящихся сил выражается тремя уравнениями:
![]()
т.е. для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на каждую из трех осей координат были равны нулю.
5.2. Момент силы относительно оси
Обозначив
момент силы ![]() относительно осей
относительно осей
![]() ,
,![]() и
и ![]() ,
можем записать:
,
можем записать:
![]()
где
![]() ,
,
![]() и
и ![]() модули проекций сил на плоскости,
перпендикулярные той оси, относительно
которой определяется момент; l
–
плечи, равные длинам
модули проекций сил на плоскости,
перпендикулярные той оси, относительно
которой определяется момент; l
–
плечи, равные длинам
перпендикуляров от точки пересечения оси с плоскостью до проекции или ее продолжения; знак «плюс» или «минус» ставится в зависимости от того, в какую сторону поворачивается плечо l вектором проекции, если смотреть на плоскость проекции со стороны положительного направления оси; при стремлении вектора проекции повернуть плечо против хода часовой стрелки момент условимся считать положительным, и наоборот.
Следовательно, моментом силы относительно оси называется алгебраическая (скалярная) величина, равная моменту проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью.

Предыдущий
рисунок иллюстрирует последовательность
определения момента силы ![]() относительно оси Z.
Если задана сила и выбрана (или задана)
ось, то: а) перпендикулярно оси выбирают
плоскость (плоскость ХОУ); б) силу F
проецируют на эту плоскость и определяют
модуль
относительно оси Z.
Если задана сила и выбрана (или задана)
ось, то: а) перпендикулярно оси выбирают
плоскость (плоскость ХОУ); б) силу F
проецируют на эту плоскость и определяют
модуль ![]() этой проекции; в) из точки 0 пересечения
оси с плоскостью опускают перпендикуляр
ОС к проекции
этой проекции; в) из точки 0 пересечения
оси с плоскостью опускают перпендикуляр
ОС к проекции ![]() и определяют плечо l
= ОС; г) глядя на плоскость ХОУ со стороны
положительного направления оси Z
(т.е. в данном случае сверху), видим, что
ОС поворачивается вектором
и определяют плечо l
= ОС; г) глядя на плоскость ХОУ со стороны
положительного направления оси Z
(т.е. в данном случае сверху), видим, что
ОС поворачивается вектором ![]() против
хода стрелки часов, значит
против
хода стрелки часов, значит
![]()
Момент
силы относительно оси равен нулю, если
сила и ось лежат в одной плоскости: а)
сила ![]() пересекает ось (в этом случае l
= 0);
пересекает ось (в этом случае l
= 0);

б) сила
![]() параллельна оси (
параллельна оси (![]() );
);
в)
сила ![]() действует вдоль оси (l=0
и
действует вдоль оси (l=0
и
![]() ).
).