

TOEIsaev
.pdf2. По оси x |
в масштабе тока M I [ А/ см] откладываем значение тока в |
||||
цепи I . Затем, относительно тока строим топографическую диаграмму |
|||||
i(t) |
|
M |
|
|
напряжений. Напряжение откла- |
|
|
L2 |
|
дываем в масштабе напряжения |
|
U(t) |
L1 |
R1 |
R2 |
MU [В / см]. Напряжение UR1 сов- |
|
|
|
|
|
|
падает по фазе с током I . Напря- |
|
|
|
|
|
жение UL1 опережает ток на 90 |
|
|
градусов. Затем напряжение вза- |
|||
|
UM |
имной индукции UM отстает от |
|||
|
|
тока на 90 градусов, потому что |
|||
|
|
мы имеем встречное включение, |
|||
UM |
UL2 |
при этом взаимные потоки вычи- |
|||
UR2 |
таются. Далее откладываем на- |
||||
|
UL1 |
пряжение UR2 на сопротивлении |
|||
|
|
R2 |
совпадающее по фазе с током |
||
UR1 |
I |
I . |
Затем |
откладываем напряже- |
|
ние UL2 |
опережающее ток на 90 |
||||
|
|
||||
|
|
градусов. И наконец, откладываем |
|||
|
Рис. 2.21 |
напряжение взаимной индуктив- |
|||
|
ности UM , отстающее от тока на |
||||
|
|
||||
|
|
90 градусов. |
|||
§2.8. Расчет цепи с магнитно-связанными индуктивностями
Рассмотрим цепь с магнитно-связанными катушками индуктивности. Данные цепи таковы:
e(t) = 40 |
2 |
sin(wt + 45 )В, |
f = 50Гц, R = 20 Ом, |
|
M = 0,1Гн, L1 = 0, 2Гн, |
L2 = 0,15Гн, |
|||
C = 60 ×10−6 мкФ. |
|
|
||
Определим величины X L1, |
X L2 , |
X M , X C , E |
||
61

X M = ωM = 31, 416 Ом, X L1 = ωL1 = 62,832 Ом, |
|
||||
X |
L2 |
= ωL = 47,124 Ом, X |
C |
= 53,052 Ом, E = 40e j 45 |
В. |
|
2 |
|
|
||
R |
I1 |
I2 |
L2 |
L1 M
E C 
 2R R I3
2R R I3
Рис. 2.22
Запишем законы Кирхгофа, с помощью которых определяются токи и напряжения в цепи. Запишем эти уравнения для мгновенных значений токов и напряжений, а затем перепишем их для комплексных - действующих значений.
В соответствии с представленной схемой имеем. i1 − i2 − i3 = 0;
i R + L |
di2 |
|
− M |
di3 |
+ i 2R = e(t); |
|
|
|
|||||||
|
|
|
|
|
|
||||||||||
1 |
|
1 dt |
|
|
|
dt |
|
|
2 |
|
|
|
|
||
|
di3 |
|
|
|
di2 |
1 |
∫i |
|
di2 |
|
di3 |
|
|||
L2 |
|
− M |
|
|
+ |
|
3dt + i3R − i2 2R − L1 |
|
+ M |
|
= 0. |
||||
dt |
|
dt |
C |
dt |
dt |
||||||||||
Перепишем это уравнение в символической форме:
I1 − I 2 − I 3 = 0;
I1R + jX L1 I 2 − jX M I 3 + I 2 2R = E;
jX L2 I 3 − jX M I 2 − jX C I 3 + I 3R − I 2 2R − jX L1 I 2 + jX M I 3 = 0.
Приведем подобные члены и упорядочим в матричном виде:
I1 − I 2 − I 3 = 0;
I1R + (2R + jX L1 ) I 2 − jX M I 3 = E;
(−2R − jX L1 − jX M ) I 2 + (R + jX L2 + jX M − jXC ) I 3 = 0.
Теперь можно записать матричное уравнение |
|
|
|
|
|
||||||||||||
1 |
−1 |
|
|
|
|
|
|
−1 |
|
|
|
|
|
|
|
0 |
|
R |
2R + jX |
|
|
|
|
|
|
− jX |
|
|
|
|
|
|
|
||
A = |
|
L1 |
|
|
|
|
|
M |
|
|
|
|
|
, B = E . |
|||
0 − 2R − j ( X |
|
+ X |
|
) |
R + j ( X |
|
+ X |
|
− X |
|
) |
|
|
||||
|
|
|
L1 |
|
|
M |
|
|
|
L2 |
|
M |
|
C |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поставим данные и получим |
|
|
|
|
|
|
|
|
|
|
|||||||
1 |
−1 |
|
|
|
|
−1 |
|
|
|
|
0 |
|
|
|
|
|
|
A = 20 |
40 + 62,832 j |
|
− 31, 416 j |
, |
Β = 28, 284 + 28, 284 j . |
||||||||||||
|
− 40 − 94, 248 j |
20 + |
|
|
|
|
|
|
|
|
|
|
|||||
0 |
25, 488 j |
|
|
0 |
|
|
|
|
|
||||||||
62
|
|
|
0,509 + 0,996 j |
|
1,118e j62,921 |
|
|
AI = B → I = A |
−1 |
|
|
|
0, 271e |
j51,416 |
|
B = |
|
0,169 + 0, 211 j |
= |
|
. |
||
|
|
|
0,34 + 0,784 j |
|
0,855e j66,539 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
По полученным результатам запишем мгновенное значения токов в ветвях
i1(t) = 1,11
 2 sin(ωt + 62,921)A, i2 (t) = 0, 271
2 sin(ωt + 62,921)A, i2 (t) = 0, 271
 2 sin(ωt + 51, 416)A,
2 sin(ωt + 51, 416)A,
i3 (t) = 0,855
 2 sin(ωt + 66,539)A.
2 sin(ωt + 66,539)A.
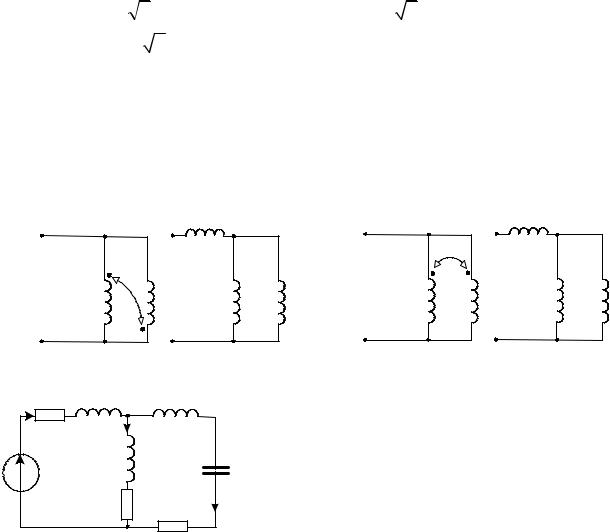
Использование других методов расчета таких как метод узловых потенциалов, метод контурных токов затрудняется из-за наличия индуктивной связи, поэтому исходную схему упрощают, производя развязку индуктивной связи. Пример развязки индуктивной связи приведен на рисунке. Следует обратить внимание на то, что на рисунке нет направлений токов поэтому нет смысла говорить о встречном или согласном соединении.
|
|
|
|
|
-M |
|
|
|
M |
|
|
|
|
L1 |
L2 |
|
|
|
|
M |
|
|
|
|
|
|
L1+M |
L2+M |
L1 |
L2 |
L -M |
L -M |
|||
|
|
|
M |
|
|
|
1 |
2 |
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Рис. 2.23 |
|
|
|
|
|
I |
R |
-M |
I2 |
L +M |
В нашем случае схема развяжется |
||||||
как указанно на рисунке. Теперь мож- |
|||||||||||
1 |
|
|
|
2 |
|
||||||
|
E |
L1+M |
|
C |
но использовать любой известный ме- |
||||||
|
|
|
|
тод расчета. Наиболее рациональным |
|||||||
|
|
|
2R |
R |
I3 |
методом расчета в данном случае бу- |
|||||
|
|
|
дет метод узловых потенциалов. Оп- |
||||||||
|
|
|
|
|
|
||||||
|
|
Рис. 2.24 |
|
|
ределим |
эквивалентные |
сопротивле- |
||||
|
|
|
|
ния ветвей схемы. |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
Z1 = R − jX M = 20 − 31, 416 j Ом, |
|
|
|
|||||
|
|
|
Z 2 = 2R + j ( X L1 + X M ) = 40 + 94, 248 j Ом, |
|
|
||||||
|
|
|
Z 3 = R + j ( X L2 + X M − XC ) = 20 + 25, 488 j Ом. |
|
|
||||||
63
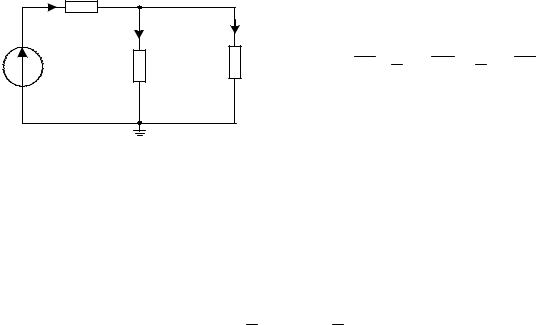
Перерисуем схему замещения и запишем уравнения для потенциа- |
|||||||||||||
|
|
|
|
1 |
лов |
методом |
узловых напряжений. |
||||||
I1 |
Z |
|
|
Находим проводимости ветвей |
|
||||||||
|
|
I2 |
|
||||||||||
|
|
1 |
|
I3 |
|
|
= 1 , Y |
|
= 1 , Y |
|
= 1 |
|
|
|
|
|
Z |
|
Z3 |
Y |
1 |
2 |
3 |
, |
|||
E |
|
|
2 |
|
Z1 |
Z 2 |
Z 3 |
|
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
а затем потенциал первого узла: |
|
|||||||
2
Рис. 2.25
ϕ |
(Y |
1 + |
Y |
2 + |
Y |
3 ) = |
E |
Y 1, |
|||||||||
1 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ = |
|
|
|
|
E |
Y 1 |
= −13,183 + 24,363 j = 27,701 e j118,419 B. |
||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
||||||||||
1 |
|
|
Y |
1 + |
Y |
2 + |
Y |
3 |
|
|
|
||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
||||||||||
При известном потенциале можем определить токи во всех ветвях
I1 = (E − ϕ1 )Y 1, I 2 = ϕ1Y 2 , I1 = ϕ1Y 3
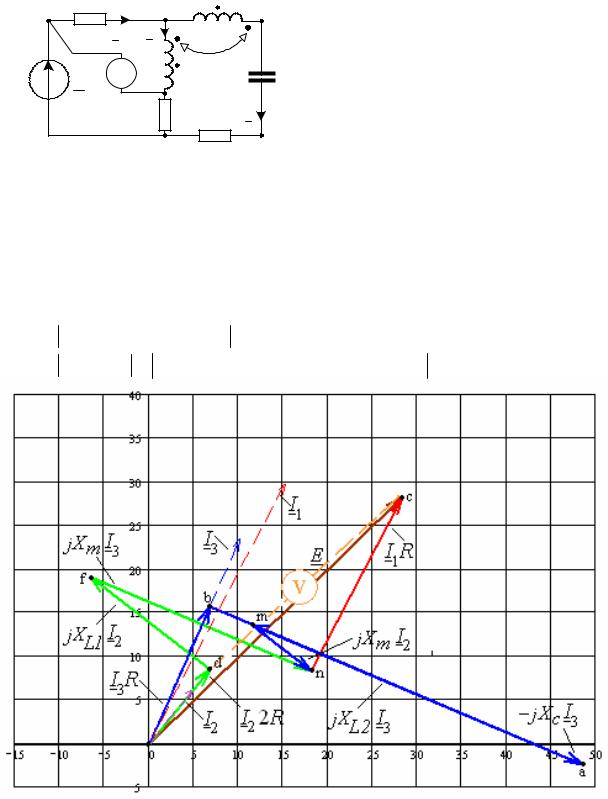
§2.9. Построение векторной диаграммы
Для построения векторной диаграммы в первую очередь нужно задаться масштабом тока и напряжения. Следующим этапом строится лучевая диаграмма токов, а затем по отношению к ней строится топографическая диаграмма напряжений. Учитывая, что ток и напряжение на активном сопротивлении находятся в фазе, векторы напряжения и тока на диаграмме следует откладывать параллельно друг другу, и направленными в одну сторону. Напряжение на индуктивности опережает ток индуктивности на 90 градусов, следовательно, вектор напряжения откладывается перпендикулярно вектору тока с опережением (откладывается против часовой стрелки). Напряжение на емкости отстает от тока емкости на 90 градусов, следовательно, вектор напряжения откладывается перпендикулярно вектору тока с отставанием (откладывается по
часовой стрелке).
Приведем пример построения диаграммы для нашей схемы. От-
кладываем в масштабе токи и напряжения M |
|
= |
1 |
А/см, M |
|
= В/см |
I |
|
U |
||||
|
30 |
|
|
|||
|
|
|
|
|
||
(см. диаграмму). Вычислим необходимые значения напряжений на элементах.
64
|
E = 40e j45 = 28, 28 + j28, 28; |
|
UR1 = I1R = 22,369B; |
|
UL1 = I2 X L1 = 17B; |
|
UR2 = I2 2R = 10,822B; |
|
UM 2 = I3 X M = 26,861B; |
|
UR3 = I3R = 17,1B; |
Рис. 2.26 |
UC = I3 X C = 45,36B; |
|
UR2 = I2 2R = 10,822B; |
|
UM 2 = I3 X M = 26,861B; |
|
UL2 = I3 X L2 = 40, 292B; |
|
UM 1 = I2 X M = 8,5B. |
Определим показания вольтметра: |
|
V = I1R + I 2 jX L1 − I 3 jX M |
или |
V = E − I2 2R = 28.28 + j28.28 − (0,169 + j0, 211) 40 = 29.27B
Рис. 2.27
65
§2.10. Мощность в цепи переменного тока с взаимной индуктивностью
Полная мощность, как и прежде, определяется выражением
N |
|
|
|
|
|
|
|
S = ∑ ±Ek I *k |
= P + jQ, S = P2 + Q2 , |
||
k =1 |
|
|
|
P - активная мощность, Q - реактивная мощность.
Потребляемая активная и реактивная мощности определяются соотношениями соответственно:
P = |
N |
R I 2 |
, Q = |
N |
|
I 2 |
M |
|
|
|
2 |
± 2I |
|
I |
|
X |
|
cos(ϕ − ϕ ) . |
∑ |
∑ X |
Lk |
− ∑ |
X |
Ck |
I |
|
|
|
|||||||||
|
k =1 |
k k |
|
k =1 |
k |
k =1 |
|
|
k |
|
1 |
|
1 |
|
M |
1 2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь токи I1e jϕ1 , I2e jϕ2 ветвей, в которых находится индуктивности. Знак плюс выбирается, когда в цепи согласное включение катушек. В противном случае выбирается знак минус.
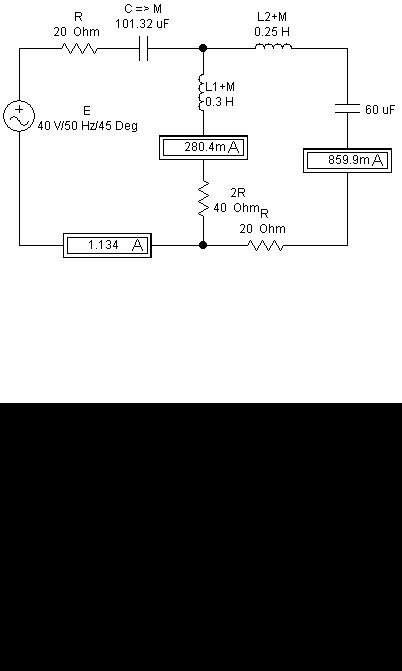
Ниже приводится электрическая схема, собранная в программноинтегрированной среде ElectronicsWorkbench с развязкой индуктивной связи. При развязке индуктивной связи получается отрицательная индуктивность. В место отрицательной индуктивности можно поставить эквивалентную емкость, которая определяется выражением
C = 1/ ω2 M .
Приведем схему рассмотренной задачи собранную в среде ElectronicsWorkbench.
Рис. 2.28
Ниже приводится программа вычисления в программно-интегрированной среде MathCAD.
66
Магнитносвязанные катушки
|
|
|
|
|
|
1.118 |
62.921 |
|
|
|
0.271 |
|
51.416 |
|
|
|
|
|
0.855 |
66.539 |
|||||||||||||||||
com(I1) = |
0.509 |
0.996 |
com(I2) |
= 0.169 |
|
0.211 |
com(I3) = |
0.34 |
0.784 |
||||||||||||||||||||||||||||
S := E×I1 |
S = 42.567- 13.766i |
P := ( |
|
I1 |
|
)2×R + ( |
|
|
|
I2 |
|
)2×R×2 + ( |
|
I3 |
|
)2×R P = 42.567 |
|||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Q := ( |
|
I2 |
|
)2× XL1 + ( |
|
I3 |
|
)2×( XL2 - Xc) - Xm×2× |
|
I2 |
|
× |
|
I3 |
|
×cos (arg(I2) - arg(I3)) Q = -13.766 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
i1 := V(I1, 0.5) |
i2 := V(I2, 0.5) |
i3 |
:= V(I3, 0.5) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
u1 |
:= V(E, 20) |
u11 := I2×R×2 + I2×j× XL1 - I3×j× Xm + V(I1×R, 20) |
|
|
|||||||||||||||||||||||||||||||||
u2 |
:= V(I2×R×2, 20) |
u22 := I2×R×2 |
+ V(I2×j× XL1, 20) |
|
|
|
u23 := I2×R×2 + I2×j× XL1 + |
V(-I3×j× Xm, 20) |
|||||||||||||||||||||||||||||
u3 := V(I3×R, 20) |
u32 := I3×R + V(-I3×j× Xc, 20) |
u33 := I3×R - I3×j× Xc + V(I3×j× XL2, 20) |
|||||||||||||||||||||||||||||||||||
u34 := I3×R - I3×j× Xc + I3×j× XL2 + V(-I2×j× Xm, 20) |
|
|
|
i1 := V(I1, 0.5)×30 |
i2 := V(I2, 0.5)×30 i3 := V(I3, 0.5)×30 |
||||||||||||||||||||||||||||||||
Лекция № 7
§2.11. Трансформатор
Электрическая цепь состоит из контуров различного назначения. Может оказаться, что для различных контуров цепи требуется отличающиеся по величине напряжения. Для преобразования переменного напряжения и для перераспределения энергии между контурами цепи, широко применяется такое устройство как трансформатор.
Функциональные и конструктивные особенности трансформаторов весьма разнообразны. Мы рассмотрим линейный трансформатор, в котором отсутствуют нелинейные эффекты. Воздушные трансформаторы являются линейными.
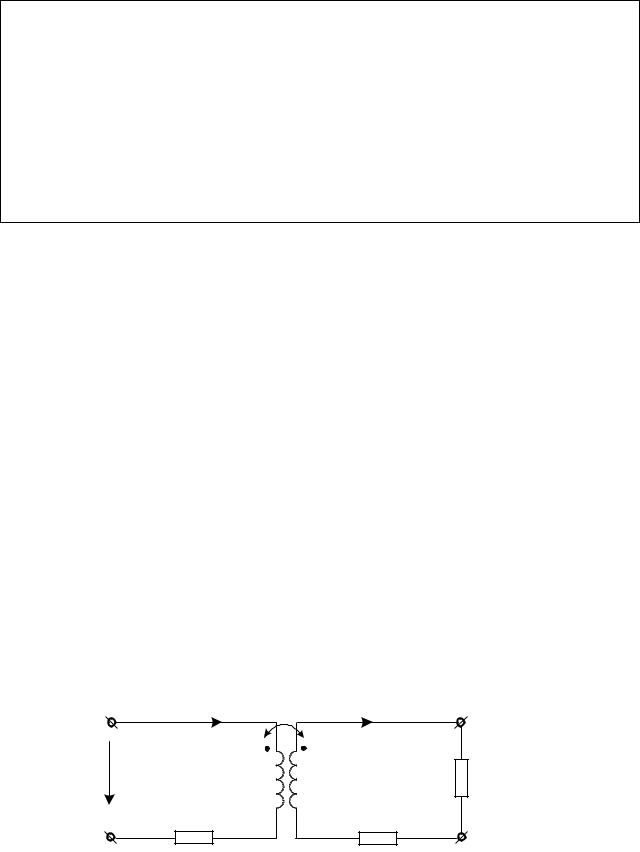
Трансформатор состоит из двух или нескольких индуктивно связанных катушек. Рассмотрим простой двухобмоточный трансформатор.
Двухобмоточный трансформатор состоит из двух обмоток – первичной и вторичной. К первичной обмотке подводится питание а ко вторичной подсоединяется нагрузка– потребитель энергии. Токи и напряжения, относящиеся к первичной и вторичной обмоткам называются первичными и вторичными соответственно.
Рис. 2.29. Трансформатор
67
Для усиления магнитной связи используют ферромагнитные сердечники вокруг, которых наматываются обмотки трансформатора (но при этом трансформатор становится нелинейным).
Запишем второй закон Кирхгофа для трансформатора, введя обозначения элементов первичной и вторичной обмоток:
X1 = X L2 , R22 = R2 + RН , X 22 = X L2 + X Н; |
|
|||||||||
I |
1 ( |
R + jX |
1 ) |
− I |
2 |
jX |
M |
= E; |
(50) |
|
|
1 |
|
|
|
|
|||||
−I jX + I |
(R + jX |
|
) = 0 . |
|
||||||
|
1 |
M 2 |
22 |
|
|
|
22 |
|
|
|
|
|
|
|
|
|
|||||
Умножим первое уравнение на (R22 + jX 22 ) , а второе уравнение на jX M и
затем сложим. В результате получим выражение тока первичной обмотки через входное напряжение и сопротивления, вносимые вторичной обмоткой Rвн, X вн :
|
I1 = |
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
= |
|||
|
|
|
|
|
R22 |
2 |
|
|
|
|
|
X 22 |
|
|
2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
R1 |
+ |
|
|
X M |
+ j X1 |
− |
|
|
|
X M |
|
|
|
|||||||
|
R222 |
+ X 222 |
R222 + X 222 |
(51) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
E |
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
R + R + j ( X |
1 |
+ X |
вн |
) |
|||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
вн |
|
|
|
|||||
где Rвн = |
R22 |
|
|
|
2 |
|
= − |
X 22 |
|
|
|
2 |
|
|
|
|
|
|
|
|||
|
|
|
X M |
, X вн |
|
|
|
|
|
X M . |
|
|
|
|
|
|
|
|||||
R2 + X |
|
2 |
R2 |
+ X |
|
2 |
|
|
|
|
|
|
|
|
||||||||
|
22 |
|
22 |
|
|
|
|
22 |
|
|
22 |
|
|
|
|
|
|
|
|
|
||
Это выражение называется приведение сопротивлений вторичной обмотки к сопротивлениям первичной обмотки. Из этого выражения вытекает следующее. Для того, что бы трансформатор передавал максимальную мощность во вторичную обмотку необходимо, чтобы выполнялось соотношение:
R1 = |
|
R22 |
2 |
|
X1 = |
|
X 22 |
2 |
|
||||
|
|
|
|
X M |
, |
|
|
|
|
X M . |
(52) |
||
R2 |
|
+ X |
2 |
R2 |
|
+ X |
2 |
||||||
|
22 |
|
22 |
|
|
|
22 |
|
22 |
|
|
||
Построим качественно векторные диаграммы для трансформатора при различных нагрузках:
68

|
|
|
|
-I1 jXM |
|
|
|
|
|
|
I2 jXL2 |
-I1 jXM |
I2 jXL2 |
|
|
I2RН |
I2 |
I2R2 |
|
|
|
-I2 jXН |
|
|
|
|
|
||
|
|
|
|
I1 jXL1 |
|
|
I2 jXН |
|
-I2 jXM |
|
|
I2RН |
I1 jXL1 |
I1R1 |
I2R2 |
||
I2 |
|
|
-I2 jXM |
||
|
|
|
|
|
I1R1 |
U1 |
U1 |
I1
I1
а б Рис. 2.30. Векторная диаграмма напряжений трансформатора при нагрузках:
а) Z Н = RН + jXН и б) Z Н = RН − jXН
Что бы добиться выполнения соотношение (52) в первичную и во вторичную цепи трансформатора включаются переменные емкости, что позволяет варьировать реактивные составляющие сопротивлений первичной и вторичной цепях, рис. 2.31.
Рис. 2.31.
Для приведенной схемы реактивные составляющие будут определятся выражениями:
X1 = X M − 1 ωC1 , X 22 = X M + X Н −1
ωC1 , X 22 = X M + X Н −1 ωC2 .
ωC2 .
Если разрешить первое выражение (52) относительно X 22 , то можно получить:
69
|
22 = |
X |
2 |
R |
− R R2 |
|
X |
|
M |
22 |
1 22 |
. |
|
|
|
|
|
|||
|
|
|
|
R1 |
||
Последнее выражение показывает, что при выполнении неравенст-
ва:
X 2 < R R → M < |
R1R22 |
. |
|
||
M 1 22 |
ω |
|
|
|
|
Невозможно получить максимальную мощность во внесенном сопротивлении Rвн .
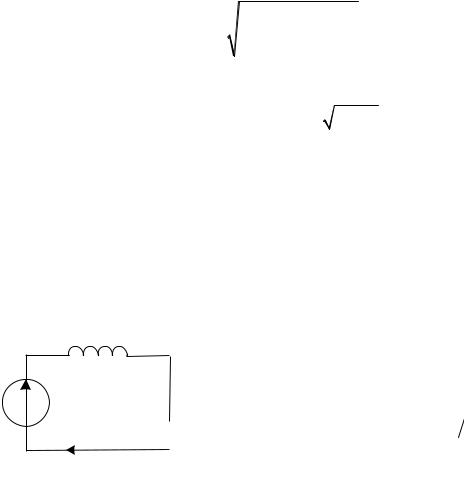
§2.12. Резонанс напряжений
|
|
|
|
|
|
Рассмотрим схему, в которой по- |
|
|
|
|
|
|
|
следовательно |
соединены индуктив- |
|
|
|
|
|
|
ность емкость сопротивление и источ- |
|
|
|
|
|
|
|
ник напряжения. Индуктивное и емко- |
|
|
|
|
|
|
|
стное сопротивления зависят от часто- |
|
|
|
|
|
|
|||
|
|
|
|
|
|
ты X L (ω) = ωL, |
X C (ω) = 1 ωC . С уве- |
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
личением частоты индуктивное сопро- |
|
|
|
|
|
|
|
||
Рис. 2.32 |
|
|
|
тивление X L (ω) = ωL увеличивается, и |
|||
|
|
|
ток в цепи с индуктивностью умень- |
||||
шается. При уменьшении частоты емкостное сопротивление уменьшается, и ток в цепи с емкостью увеличивается. Графическая зависимость индуктивного сопротивления X L (ω) от частоты приведена на рисунке, она линейна.
70