

1.7. Принцип симбиозности
Основным свойством кибернетических систем является управляемость. Это означает, что система под влиянием управляющих воздействий должна принимать лучшее в определенном смысле состояние, чем она приняла бы при отсутствии этих воздействий. Понятие «лучшее» определяется по внутренним или внешним критериям, в частности по типовому внешнему критерию w в форме (1.1) или (1.2)» установленному человеком. Поскольку в ГАП идет речь об искусственно создаваемых человеком системах, понятие «лучшее» определяется их создателем и означает, что совокупность управляющий действий должна обеспечить достижение поставленной цели при нимальных затратах усилий. Для сложных систем количественный итерий лучшего поведения с помощью функций вида (1.1) и лю- X других функций автоматически применять практически не пред- вляется возможным. Это прежде всего связано с неполнотой мате- ических моделей: отразить в функциональных зависимостях моей и в выражениях для критериев все факторы, влияющие на оцесс, практически невозможно. Кроме того, процесс подвержен иянию случайных факторов, необходимость пробивается сквозь ь случайностей, всего многообразия и характеристик которых же предусмотреть невозможно. По этой причине, как уже отме- лось, и появилось понятие большой системы, в которой на опре- ~енных иерархических уровнях присутствует человек как элемент стемы, выполняющий самую важную функцию: коррекцию управ- ющих воздействий в зависимости от условий конкретно сложив- йся обстановки. Следовательно, в механизм управления, опреде- ный следствием 6, должен органически включаться че- в е к.
От всех других элементов естественных и искусственных у правимых систем человека отличает прежде всего наличие механизма авления своим поведением в виде разума, или интеллекта. Чтобы ^вдаваться в подробные философские исследования существа этого ханизма, приведем словарные определения, которые дадут воз- жность читателю самому поразмыслить над этим предметом: разум — способность логически и творчески мыслить, высшая упень познавательной деятельности человека — ум, интеллект; интеллект — мыслительная способность, умственное начало; мысль или, что то же самое, мышление — способность человека ссуждать, представляющая собой процесс отражения объективной "ствительности в представлениях, суждениях, понятиях. „ Из этих определений следует, что целью процесса мышления (ин- лектуальной деятельности) является не выработка плана поведе- я, т. е. целенаправленная деятельность, а лишь отражение объек- , ной действительности (в нашем случае — процесса, которым ^дстоит управлять), в представлениях, суждениях, понятиях. Если ^местить два определения — интеллекта и деятельности (деятель- "ть — занятие, труд, работа каких-то органов), тоинтеллек- !альная деятельность с этих позиций будет представ- ь не что иное, как мыслительное занятие, труд, в результате кото- /-"0 объективная действительность будет отражена в представле- ;ях, суждениях, понятиях.
" •Представление объективной действительности, т. е. исследуемого ГЦесса, в виде взаимосвязанной и взаимообусловленной совокупен понятий — необходимый этап интеллектуальной деятель- Но это лишь подготовка исходной информации для более Шяого этапа — принятия решения на основании выработанной формации. Исходная информация представляет по своей сути ва- Знты возможного поведения системы, а принятие решения — акт
-уОра из этих вариантов описания процесса одного из них в каче-
«"
I. 71
стве
основного для реализации в последующей
деятельности. Более подробно этот вопрос
рассмотрен в гл. 2. В данном случае
необходимо уяснить, что
в большой системе является источником
управления, т. е. органом выработки
целеполагания, и к а к это целепо- лагание
вырабатывается.
Таким образом, мыслительная (интеллектуальная) деятельность— это поиск информации (представлений, суждений, понятий) о процессе в целях получения объективного на данный момент заключения, годного к использованию вфизичес- кой деятельности, совершаемой мышцами (машинными исполнительными механизмами). Источником таких решений, представляемых в форме управляющих воздействий, является мозг человека.
Но ведь и математическая модель функционирует в таких же целях и по таким же общим правилам. Она описывает (моделирует) исследуемый процесс. В ней ПИД должен характеризовать исходные состояния, отражающие взаимосвязи данного процесса с другими подпроцессами, входящими в более общий иерархически старший процесс. При реализации модели в вычислительной среде вырабатывается ПВД, характеризующий результат поведения системы, который может быть получен как следствие реального процесса. При изменении условий, т. е. ПИД, изменяется и ПВД — результат, конечное состояние системы. Выбор лучшего поведения, т. е. выбор из всех альтернативных вариантов поведения системы одного в качестве основного для дальнейшей реализации осуществляется с использованием внешнего критерия, установленного человеком.
Следовательно, человек в процессе интеллектуальной деятельности и математическая модель имеют в общем одинаковые функции и взаимодействуют во имя достижения одной конечной цели. Налицо взаимодействие естественного и искусственного интеллектов, т. е. партнерство, «сожительство» двух различных видов систем. Это явилось основанием назвать шестой (ПСП), определяющий необходимость включения в любую большую систему человека, принципом симбиозности:
Управляемые системы должны строиться с применением таких концепций, которые позволяют рассматривать человека как звено системы управления.
При этом человек имеет по отношению к любому уровню моделей старшую в иерархическом отношении роль: он и создает модели, и оценивает качество и характер их поведения.
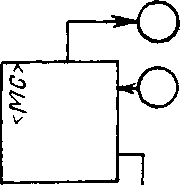
Поскольку основным базовым звеном (модулем) управляемой системы является управляемый контур (см. рис. 1.6), рассмотрим, как человек должен в него включаться (вписываться). Основным требованием является обеспечение условий объединения элементов естественного и искусственного интеллектов при участии человека в процессе управления [21 ]. Из простейшей схемы такого объединения (рис. 1.17) видно следующее. Несмотря на то что человек изображен как старшее в иерархическом отношении звено контура управления, звенья взаимодействуют как равноправные партнеры.
математической модели (ММ), являющейся элементом СМОУ ЮУ)), ПИД можно рассматривать как управляющую часть по шению к ПВД, который является управляемой (зависимой) ью. Однако само тело (ММ) в процессе ее функционирования едовательно меняет свою роль. В начальный момент ПИД по аению к телу (ММ) является управляющей частью. По мере работки исходной информации (ММ) становится управляющей ью по отношению к ПВД, содержание которого она определяет, . задает. На первом этапе человек (как управляющая часть) фор- ует ПИД, который в этот ент являехся по отношению му управляемой, подчинен- частью. После завершения мирования ПИД становится бы независимым от чело- т. е. сам становится упра- щим элементом, задающим функционирования телу "). На этом этапе как бы диняются замысел че- ,века и математи- кая модель. 3 период, когда вырабаты- ся ПВД, он по отношению елу (ММ) является подчи- ым (зависимым). Когда он аботан, он становится по ошенЦю к человеку управ- щей частью. В период, человек анализирует ин- мацию, полученную в ре- тате функционирования
}, он является по отношению к ней управляемой частью, этом этапе как бы объединяются замысел, «в ы- б о т а н н ы й» ММ, с творческим замыслом ч е - в е к а.
I
|
- управляющая часть контура*у> • |
—упра§лян)1Ц01л часть контура <у>
Рис.
1.17. Принципиальная схема объединения
элементов естественного и
искусственного интеллектов в рамках
(ЕКУ)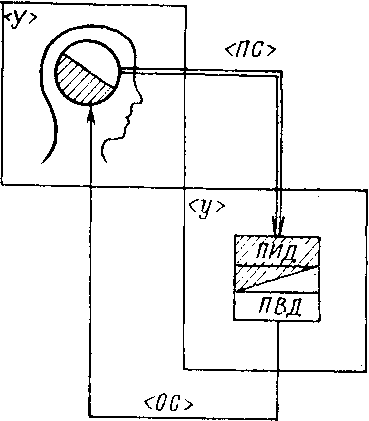
нужен новый советчик (партнер) в виде (ЭСМОУ-2), и процесс объединения элементов естественного и искусственного интеллектов повторяется "по форме с новым содержанием.
Так,
в примере с организацией функционирования
ГАП крепежной системы на I и II этапах
(рис. 1.18) в зависимости от потребностей
и номенклатуры изделий, складских и
транспортных возможностей вырабатывается
с использованием (ЭСМОУ-1) решение об
организации режима функционирования
участка (круглосуточно, через смену или
интервально с заданным шагом работы и
остановки участка). На III этапе с
использованием (ЭСМОУ-2) в зависимости
от заданных требований к крепеж- ной
системе определяется технологический
режим работы исполнительных механизмов
(роботизированных станков) участка.
интеллектов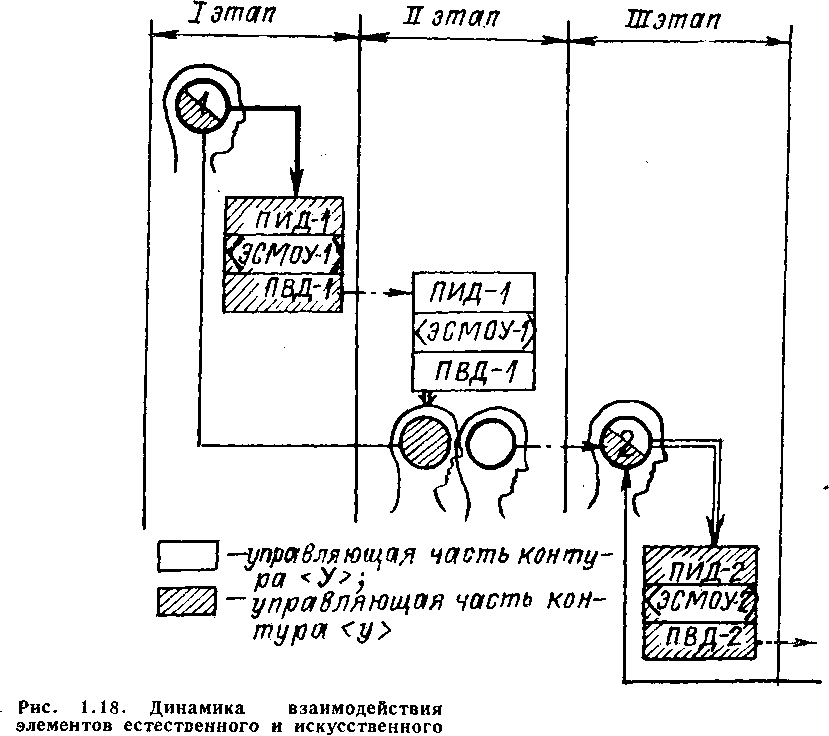
Таким образом, важнейшей прогрессивной тенденцией построения управляемых систем, в которых человек с его главенствующей ролью выступает в то же время как равноценное звено системы управления, является концепция объединения элементов естественного и искусственного интеллектов в процессе управления.
Требование объединения в процессе функционирования управляемых контуров формального замысла, «предлагаемого» (ЭСМОУ), и творческого, выработанного человеком, определяется двенадцатым следствием:
Следствие 12 .В управляемой системе должен присутствовать механизм корреляции в виде дополнительного третьего контура
У), обеспечивающего заданную корреляцию циркулирующих овных контурах параметров под влиянием управляющих воздей- хйэлеме тов естественного (человека) и искусственного ((ЭСМОУ)) "ллектов.
Реализация следствия 12 приводит к необходимости изменения овой структуры модуля (ЕКУ) (рис. 1.19). Основные контуры } (/ и 2) «прерываются» контуром 5, который реализует меха- м объединения естественного и искусственного интеллектов, по- анных на рис. 1.17 и 1.18.
В полном виде схема модуля (ЕКУ) с механизмом корреляции доставлена на рис. 1.20. В этом модуле дополнительно предусмо- нмеханизм утверждения решения, выработан- о (ИС) для (МС), т. е. со стороны старшей в иерархическом отноше- системы (механизм Ф). Ясно, что такое требование приводит к не- одимости включения в базовую схему (ЕКУ), помимо контуров 3, еще одного, четвертого контура управления — 4 для реализа- функции утверждения решения, выработанного (МС) для ниже- ящего звена, не обозначенного на схеме, со стороны (ИС), кото- по отношению к этому элементу в структуре (ЕКУ) является ршей иерархической системой. Взаимодействие человека с (ЭСМОУ) в процессе функциониро- ия системы управления организуется посредством задания и ана- параметров, содержащихся в таблицах ПИД/ПВД. Каждый раметр ПИД/ПВД представляет собой символ, задаваемый в алфа- но-цифровой форме. Каждому символу соответствует определен- функциональное толкование, функция, для реализации которой "ользуется формализованный элемент реальной обстановки в виде емента математической модели (ЭСМОУ). Оперативные элементы и символы формируются в вектор последовательности реализации ментов математической модели, составляя предложения, абзацы, аницы, и т. п. Операция с символами ведется в диалоговом ре- име: человек задает набор параметров в ПИД, модуль выдает резуль- т их преобразования в виде ПВД. Человек может снова изменить ачения параметров — модель реагирует на это изменение. Такой способ общения с моделями, реализованными в ЭВМ, в на- ящее время именуется языком управления зада- я м и. Для каждой конкретной операции, реализуемой в рамках КУ), такой язык являетсл уникальным, присущим данной опе- ции. Однако анализ множества подобных языков в случае их реа- зации в рамках (ЕКУ) показывает, что они имеют единую функ- ональную структуру, позволяющую все символы, входящие в их фавит, разделить на семь основных групп (см. рис. 1.20):
— параметры целеполагания (ПЦ);
— параметры управления (ПУ);
— параметры коррекции (ПК);
— параметры оценки эффективности (ПОЭ); (1.4)
— информация состояния (ИнС);
— сигнальные признаки обращения (СПО);
—
сигнальные
признаки подсказки (СПП).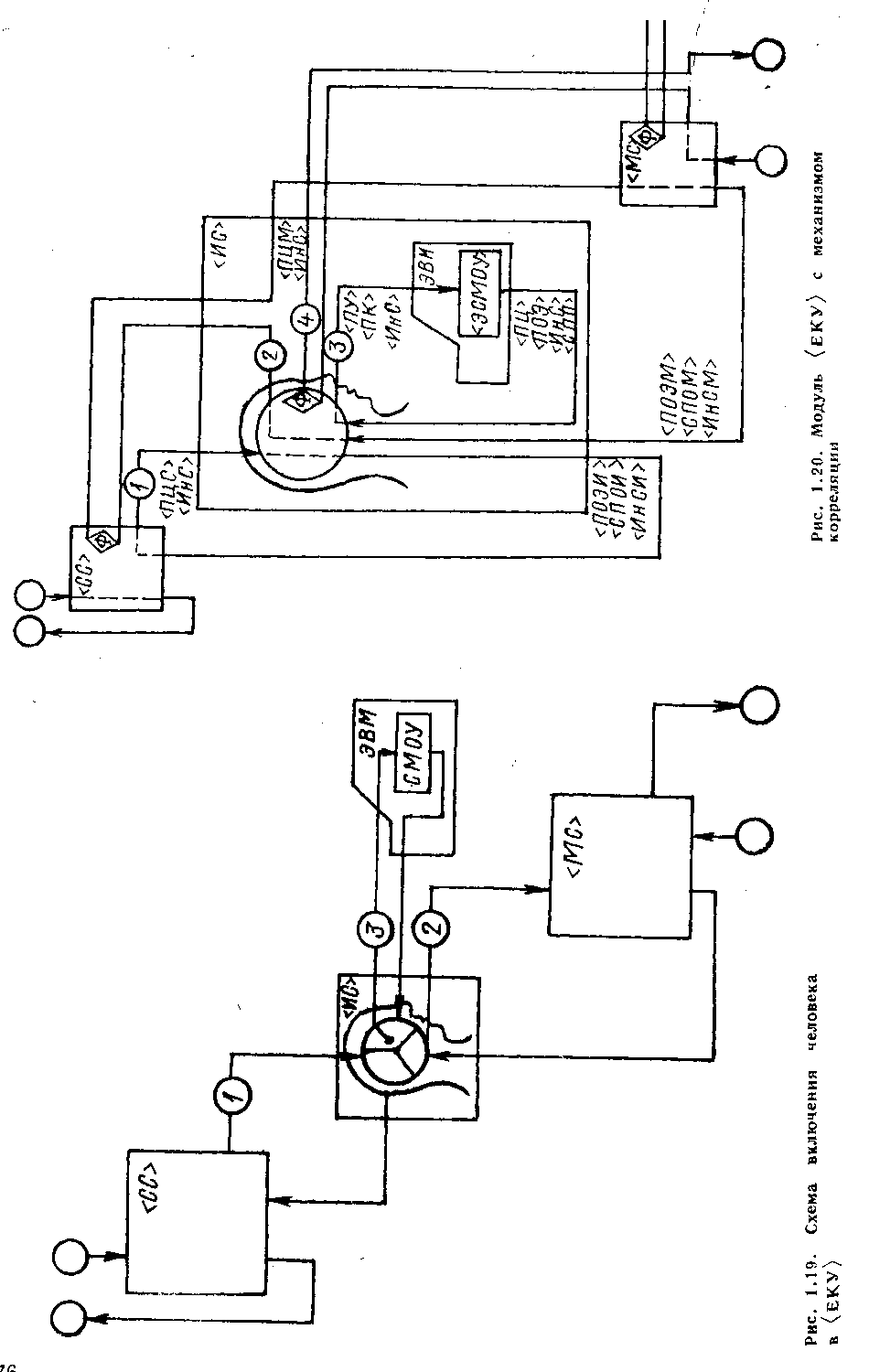
1 Парам^пры целеполагания (ПЦ) определяют цель функциониро- ния управляемых подсистем. Они циркулируют по линиям прямой язи во всех основных контурах иерархической структуры (ЕКУ). Параметры управления (ПУ) образуют специальный вектор, тавляющие которого определяют алгоритм управления реализа- ей модулей при задании конкретного варианта моделирования, "ачения составляющих этого вектора используются правилами рождающей грамматики языка диалога для формирования нужной следовательности модулей СМОУ. Параметры управления цирку- руют только в третьем дополнительном контуре (ЕКУ). Параметры коррекции (ПК) обеспечивают возможность человеку менять не* только исходную информацию, содержащуюся в ПИД, и любой из параметров, входящий в ПВД. Это множество параме- ов используется при объединении творческого, вырабатываемого ~овеком, и формального, вырабатываемого (ЭСМОУ), вариантов стижения конечной цели функционирования системы. Параметры ррекции циркулируют только в третьем дополнительном контуре и ществуют («живут») только в период выработки количественно снованного решения на управление. Параметры оценки эффективности (ПОЭ) представляют собой утренние и внешние критерии, значения которых позволяют че- веку (или автомату), принимающему окончательное решение, ичественно сравнивать между собой альтернативные варианты, араметры этого множества циркулируют в линиях обратной связи ех основных и дополнительных контуров (ЕКУ), но существуют ивут») только как вспомогательная информация, необходимая для инятия решения.
Информация состояния (ИнС) количественно характеризует ста- ческий вариант состояния объекта на заданный момент времени, нформация состояния циркулирует постоянно в линиях прямой и ратной связи всех контуров (ЕКУ) и является основой для орга- ^зации процесса моделирования и управления. В линиях прямой язи (ИнС) может быть самой разнообразной, в линиях обратной язи — только такой, которая необходима старшей системе, чтобы нять, почему та или иная младшая система не справляется с заднем или предлагает свой вариант выполнения задания, являю- " йся с ее точки зрения более эффективным.
В последнем случае вырабатываются значения параметров из спе- ~~льного множества сигнальных признаков обращения (СПО). Они гнализируют старшей системе о необходимости пересмотреть (пробить) задание соответствующей младшей системе, зафиксирован- Ъ в значениях параметров множества (ПЦ). Признаки обращения ркулируют только в линиях обратных связей основных контуров
КУ).
Сигнальные признаки подсказки (СПП) представляют собой зву- >ые, световые или комбинированные сигналы, содержащие бук- ,'но-цифровую или образную информацию, выдаваемую на оконеч- ~е устройства в целях повышения оперативности понимания чело- ком отдельных (как правило, критических или важных) вариантов состояния, которые приняла или может принять при определенных условиях система. Эти параметры циркулируют толькЬ в линии обратной связи третьего дополнительного контура. {
Для обозначения принадлежности того или иного (компонента множества (1.4) к конкретному элементу системы в состав его аббревиатуры вводятся дополнительные символы: С — для старшей системы, И — для исследуемой, М — для младшей.
Анализ особенностей множества (1.4) показывает, во-первых, что подмножества (ПЦ), (ПУ), (ПК), (ПОЭ), (ИнС) и (СПО) характеризуют необходимые функции рассматриваемого типового языка, так как без них невозможно обеспечить реализацию задач моделирования и управления ГАП. В настоящее время нет общих методов [50], позволяющих оценить достаточность (полноту) функций языка. Включение в (1.4) подмножества (СПП), которое обеспечивает уменьшение степени неоднозначности понимания человека в процессе диалогового общения в линии (ЭСМОУ) ->- человек, позволяет постоянно расширять возможности языка, поскольку (СПП) является самым динамичным его элементом.
Во-вторых, язык, описываемый множеством (1.4), относится к самостоятельному классу специализированных операционных диалоговых языков (СОДЯ), обеспечивающих главенствующую роль человека при объединении элементов естественного и искусственного интеллектов в процессе функционирования управляемых систем. Этот факт подчеркивается тринадцатым следствием:
Следствие 13. Главенствующая роль человека в управляемой системе обеспечивается механизмом общения элементов естественного (человека) и искусственного ((ЭСМОУ)) интеллектов в виде специализированного операционного диалогового языка (СОДЯ).
Реализация следствия 13 является важным условием обеспечения высокой эффективности функционирования ГАП. Разработка СОДЯ должна вестись опережающими темпами при создании СМОУ ГАП. При этом в составе СОДЯ необходимо предусмотреть наличие всех семи охарактеризованных выше функциональных групп.
Так,
в состав СОДЯ для рассматриваемой нами
в виде сквозного примера системы
крепления можно включить следующие
параметры: множество (ПЦ) — задание на
функционирование элемента ГАП,
содержащееся в табл. 1.2; множество (ПУ)
— параметры, характеризующие режимы
обработки деталей крепежной системы;
множество (ПК) — конкретные скорости
выполнения операций роботизированными
элементами участка ГАП множество (ПОЭ)
— параметры, характеризующие степень
снижения стоимости производства
конечного продукта, экономию электроэнергии
и т. п.; множество (ИнС)— параметры,
характеризующие текущее состояние
режима функционирования линии ГАП;
множество (СПО) — параметры,
1
Как правило, модель вырабатывает
параметры для организации режима
функционирования роботизированных
элементов линии ГАП. Однако человек
может попробовать (пожелать) их
изменить, например ускорить, как было,
скажем, при увеличении отдельными
токарями скорости работы токарных
станков. Система должна позволить это
реализовать, но при этом должны быть
количественно оценены временная
выгода (повышение производительности)
и долговременные убытки от преждевременного
изнашивания станков или уменьшения
сроков периодичности профилактических
и ремонтных работ.
\
нализируюкие
старшей системе, что заданная средняя
производительность вы- а деталей не
может быть обеспечена без, например,
введения в работу дополни- ьного станка,
находящегося в резерве (ремонте);
множество (СПП) — сигнал, ример, о там,
что заклинило транспортную линию.
\ Принцип оперативности
По мере совершенствования техники управления участие чело- ка в процессе управления становится все менее непосредственным, рвоначально человек освободился от функции непосредствен- о воздействия на органы управления, передав эти функции ис- нительному техническому устройству, для которого он выраба- вает управляющие сигналы. Например, так произошло с рулевым, гда непосредственную перекладку руля стала осуществлять руле- я машина. Затем человек освободился от формирования сигналов равления, также передав эту функцию техническому устройству, горому он задал значения управляемых величин. Например, курс раб ля или самолета выдерживает авторулевой, вырабатывая кор- ктирующие сигналы для управления рулевой машиной. Дальней- развитие системы может освободить человека от функции опре- тения задания. Это также доступно техническому устройству на яовании цели, установленной человеком. Например, в навигацион- й системе устанавливаются конечная точка, в которую должен ибыть корабль или самолет, и необходимое время прибытия, стема сама рассчитывает курс и скорость с учетом оптимизации щих затрат ресурсов, обеспечивает навигационную безопасность, шает задачи расхождения со встречными объектами и т. п., преду- атривая изменение режима движения так, чтобы независимо от ешних условий прибыть в заданную точку в заданный срок.- Все это простейшие фазы участия человека в системах управления, где его роль в основном сводится к выполнению функций одного исполнительных механизмов системы управления. Такие функции еловек выполнял и будет выполнять в том или ином объеме в зави- ймости от степени автоматизации системы управления. Даже в полостью автоматических системах, работающих без участия человека, стема рано или поздно отклонится от необходимого режима функ- "онирования. Причинами отклонений являются неизбежное старе- и изнашивание элементов системы, изменение условий окружа- д,ей среды или целей человека, создавшего систему. Изменения гут иметь различные временные периоды. Но независимо от их ~одолжительности любую управляемую систему нельзя рассматри- ать как статическую. Даже для реализации фиксированной цели, говоря уже о возможном ее изменении, систему необходимо рас- атривать в непрерывном развитии и совершенствовании, т. е. динамике.
Динамичность управляемых систем приводит к необходимости читывать в концепциях их построения проявление фактора времени, аиболее существенным здесь является то, что управляющие воздей- вия, обеспечивающие гомеостатическое следование постоянным
или переменным целям системы, должны вырабатываться/в реальном масштабе времени. Раньше это определялось лишь временными характеристиками индивидуальных реакций человека, осуществляющего управление (рулевого, руководителе, предприятия и т. п.). Теперь время реализации корректирующей реакции зависит как от быстродействия (ЭСМОУ), моделирующего процесс управления, так и от времени взаимодействия элементов естественного и искусственного интеллектов при разрешении повседневных и критических ситуаций.
Определяющим при этом является факт своевременной выработки управляющих воздействий так, чтобы они могли быть использованы в процессе движения (функционирования) системы. Эта закономерность определяется седьмым (ПСП), называемым принципом оперативности:
Изменения движения управляемой системы под влиянием различных воздействий должны происходить своевременно, m. е. в реальном масштабе времени.
В общем случае для управляемых систем временные ограничения являются абсолютными. Они могут носить различный характер в зависимости от решаемой задачи, но всегда играют жизненно важную роль для системы в целом, накладывая особые требования на выбор аппаратуры, качество и надежность (ЭСМОУ).
Функционирование в реальном масштабе времени означает, что время реакции системы на управляющие воздействия старших систем или данные информации состояния, обычно поступающие произвольно, должно укладываться во временные ограничения, определяемые внешними условиями. Например, для выдачи команд, корректирующих полет ракеты, временные ограничения измеряются долями секунды. Сигнал, выработанный и исполненный позже, чем этого требует временное ограничение, теряет смысл (решение задачи будет сорвано).
Временные ограничения не всегда бывают столь жесткими. Например, при запросе момента точного времени по телефону время ожидания абонента не является жестко фиксированным. Ответ, полученный и позже установленного предельного срока, не теряет смысла для терпеливого клиента. Для такого рода задач характерно, что за пределами установленного временного порога эффективность реакции системы не падает резко до нуля, как в случае с ракетой, а постепенно уменьшается.
Для других задач время реакции не должно превышать нескольких часов, одного или нескольких дней. Это имеет место при решении вопросов управления различными участками ГАП.
На
рис. 1.20 представлена схема циркуляции
информационных параметров в исследуемой
системе без учета требования
функционирования в реальном масштабе
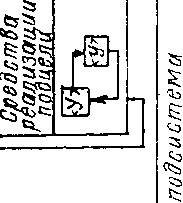
времени. Рассмотрим, как протекает
процесс в (ИС) после получения ею заданной
(СС) цели функционирования. Систему
можно представить в виде двух подсистем:
управляющей и реализующей (рис.
1.21).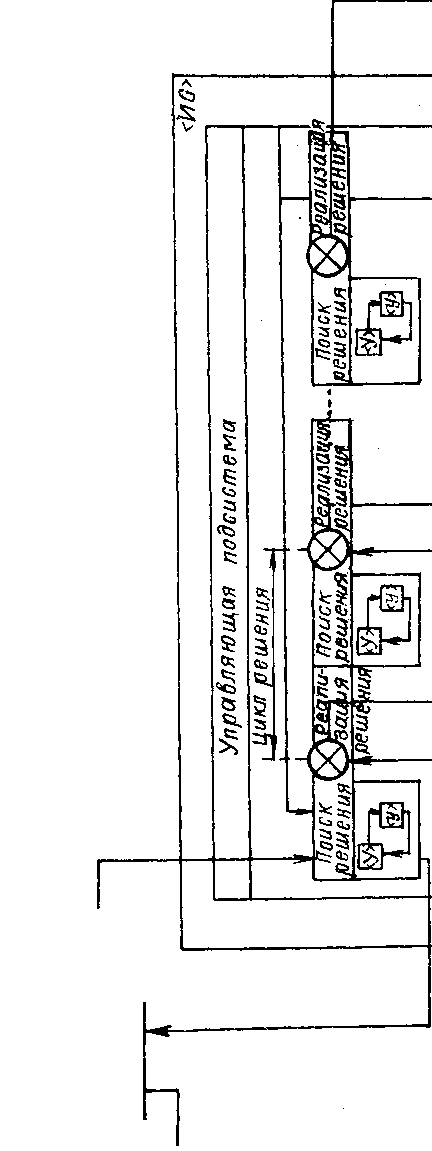
о.
2
|
ticotti |
3 |
|
- ..if*... |
|
/
/
В управляющей подсистеме с момента получения (фх) от старшей системы начинается анализ возможности их выполнения --- этап поиска решения. В результате принимается решейие по схеме, показанной на рис. 1.22. Задается вариант решения (I этап), т. е. формируется ПИД-1 соответствующего (ЭСМОУ-1). Реализуется в вычислительном комплексе (ЭСМОУ-1) (II этап) и формируется ПВД-1, который анализируется на III этапе (анализа .вариантов). При этом нижняя часть рис. 1.22 представляет собой развернутую на более низком иерархическом уровне динамику функционирования (ЕКУ), представленного на рис. 1.18. В момент принятия решения вырабатываются (ПЦ) для реализующей подсистемы, которые передаются в ее управляющую часть (У), осуществляющую управление оконечным роботизированным элементом (у).
Процесс реализации цели, заданной старшей системой, в управляющей подсистеме расчленяется на технологические операции, каждая из которых имеет этапы поиска и реализации решения, разделенные точками принятия решения. Как видно из рис. 1.22, в этих точках решения могут приниматься автоматом или вырабатываться в результате взаимодействия элементов естественного и искусственного интеллектов.
В общем случае в процессе управления участвуют две категории специалистов: лица, обосновывающие решения (ЛОР), к лица, принимающие решения (ЛПР). Первую группу в зависимости от характера решаемой задачи составляют специалисты плановых отделов, отделов главного технолога, главного инженера и т. п. Лица, принимающие решения, — это, как правило, руководители предприятий или отдельных его подразделений, главные конструкторы, главные технологи и т. п.
На этапе проектирования, например, участков ГАП в процессе обоснования анализируются альтернативные варианты конструктивных, технологических, организационных решений и т. п. На этапе фактического функционирования линий ГАП обоснованию подлежат варианты организации производственных процессов, режимов работы роботизированных механизмов, сменность профилактических осмотров и текущих ремонтных работ и т. п. Альтернативные варианты этих решений (обозначим число их через тш. ф) рассчитывают с использованием в заданные моменты времени соответствующих (ЭСМОУ) либо один человек, именуемый ЛОР, либо группы лиц, в состав которых в зависимости от сложности решаемой задачи входят специалисты разной квалификации (в масштабе от сектора до специализированного J НИИ).
По
окончании работы планирующий орган
(ЛОР) представляет лицу, принимающему
решение (ЛПР), в виде основного (базового)
вариант, рекомендуемый в качестве
проекта будущего рабочего решения.
Число всех исследованных при этом
вариантов, равно как и степень охвата
в их характеристиках диапазона условий
функционирования системы, характеризуют
степень обоснованности предлагаемого
ЛОР проекта и количественно определяют
глубину его проработки.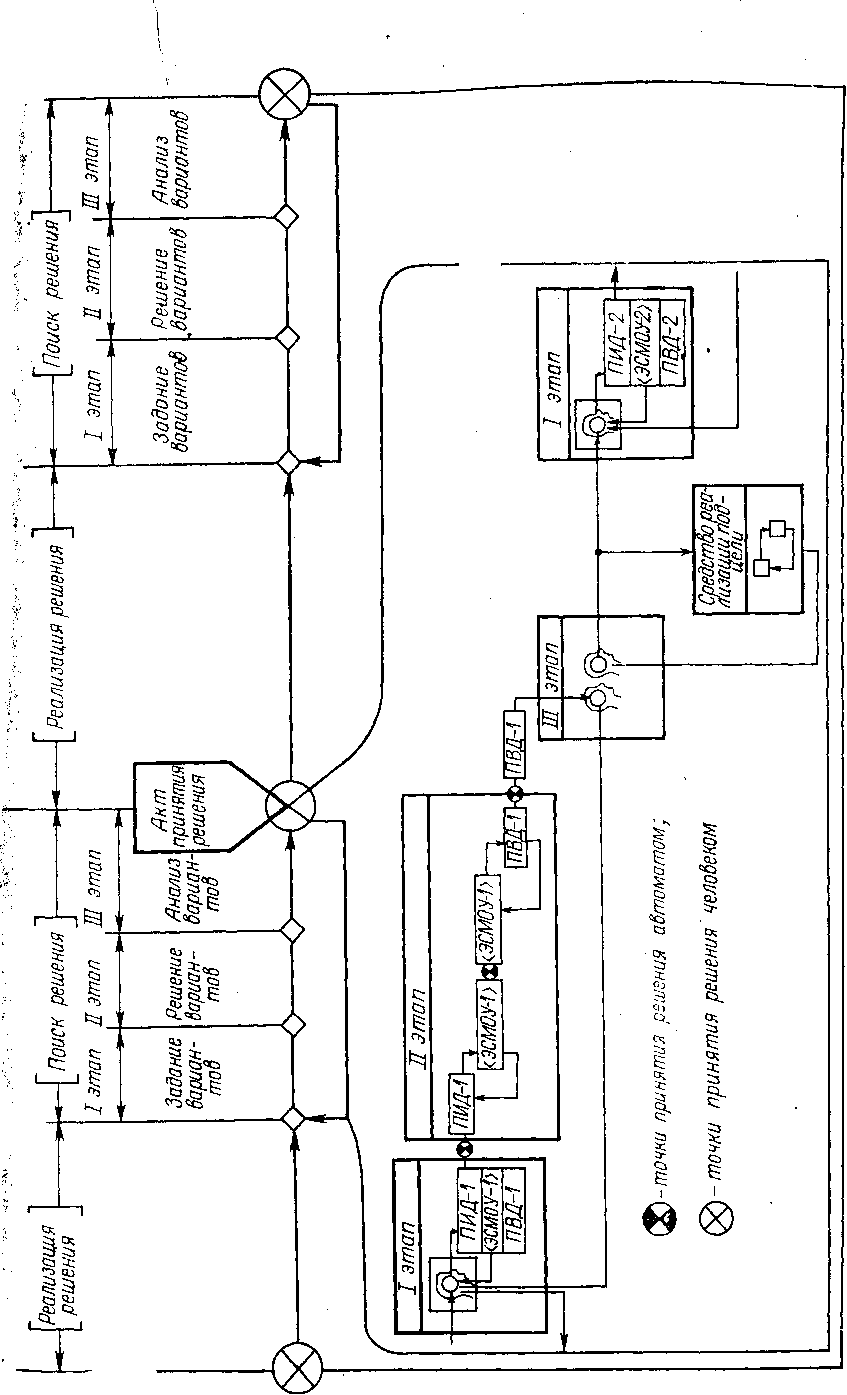
>
о
*
S
ш
5
«
X
Oi
S
a
И
О.
«Н
Я
5
о
я
*
*
2 S
и
еС
g
ей о
SS &
о а
К о
и а.
6*
ЛПР может утвердить предлагаемый основной вфиант, может рассмотреть остальные альтернативные варианты, подготовленные ЛОР, и выбрать из них тот, который, по его мнению, в наибольшей степени удовлетворяет поставленной дели, а может корректировать (вносить дополнительные изменения) предложенный ЛОР основной вариант (число рассмотренных ЛПР вариантов обозначим тк,ф).
При рассмотрении каждого из тш. ф и тк.ф вариантов затрачивается соответствующее время: А^ — на подготовку варианта к решению; А/2 — на решение варианта в вычислительном комплексе или модуле микропроцессора; А/3 — на анализ полученного результата решения.
Для организации этой работы в реальном масштабе времени необходимо: чтобы она закончилась к некоторому сроку рек, установленному планом-графиком (вариант I); чтобы период ее выполнения не превышал некоторого значения АТзад, количественно выражающего ограничения, накладываемые на процесс внешними условиями (вариант II). Первый способ ограничения имеет место, как правило, при проектировании, разработке, планировании работ и и т. п.; второй — в процессе фактического функционирования системы.
Условиями функционирования системы в реальном масштабе времени являются (рис. 1.23):
t -j- А/ < РеК — для I варианта; | At < АТзад — для II варианта, }
где А* = ][] I 2] ДЦ (Ц = ш> к); t — текущее реальное время.
Ц \/=1 /
Формально условия (1.5) для I и II вариантов эквивалентны, поскольку можно считать, что АГзад = рек — t. Фактически (в зависимости от организации работ) эти варианты могут различаться, чем и вызвана раздельная запись для них условий (1.5).
Для построения плана работы необходимо задать значения тш. зад и зад- В зависимости от этого строится график функционирования человека (ЛОР и ЛПР) в системе как органически присущего ей элемента. При этом строго по времени регламентируется творческая работа человека в составе системы. Графики загруженности ЛОР и ЛПР выдаются на печать в виде, показанном на рис. 1.23, и выводятся на световое табло, а моменты начала этапов дублируются звуковыми и световыми сигналами, вырабатываемыми в соответствии с параметрами (СПП) множества (1.4). Для реализации этой функции в составе любой управляемой системы должен присутствовать специализированный механизм регулирования, организующий и контролирующий ее функционирование, в виде контрольно- организующей системы ((КОС)), обеспечивающей выполнение условий (1.5). Это требование определено четырнадцатым следствием:
^Следствие
14
.В управляемой системе должен
присутствовать механизм регулирования
работы в реальном масштабе времени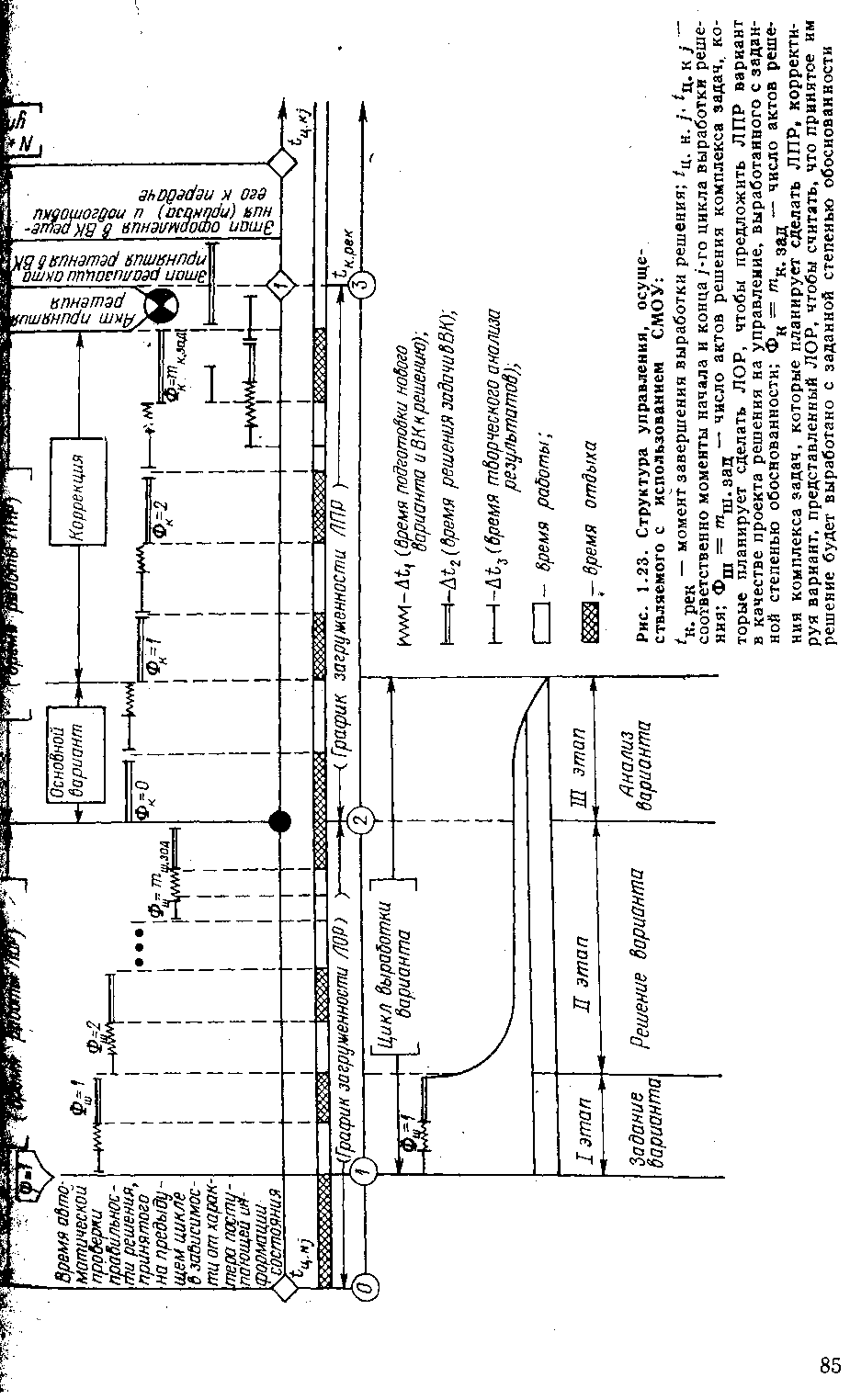
в виде специализированной контрольно-организующей системы «КОС)).
Одним из результатов функционирования (КОС) является вывод на отображающие устройства графиков организации работы ЛОР и ЛПР (рис. 1.23). В этом случае должен осуществляться обмен информацией в линии ЭВМ-^человек. Выбор^языка для осуществления обмена информацией между человеком и машиной — (ЭСМОУ) (другими словами, выбор способов кодирования этой информации) является важной и сложной задачей, от правильного решения которой существенно зависит успех совместного участия человека и машины в решении задач управления ГАП. Для этих целей лучше всего подошел бы язык устного и письменного общения между людьми, в меньшей степени — язык математических символов и геометрических фигур.
Использование естественных языков во многом зависит от возможностей технических средств и математических методов обработки информации. В настоящее время такие работы успешно ведутся, но внедрение их в практику потребует определенного времени.
Язык математических символов и геометрических фигур (образов) — менее удобная форма общения, чем устная речь и письмо. Эта форма общения требует от человека выполнения дополнительной операции декодирования сигналов-символов, т. е. перевода их в представления реальной обстановки. Операция декодирования сигналов- символов является одним из труднейших умственных действий, при которых человек может совершать серьезные ошибки [12, 49]. Тем не менее при существующих технических средствах и математическом обеспечении эта форма общения является основной.
При создании для такого общения СОДЯ первоначально необходимо расчленить исследуемый процесс на операционные элементы, с помощью которых человек создает в процессе управления варианты реальной обстановки, в виде так называемых информационны х м о д е л е й [21 ].
Операционные элементы, из которых формируется информационная модель, представляют собой целостные группы сигналов-символов, несущих информацию для принятия решений о состоянии реальной обстановки, эффективности функционирования автоматизированной системы, качестве работы ГАП и т. п. Эти элементы составляют операционный алфавит СОДЯ. Условные символы операционного алфавита, каждому из которых соответствует определенное содержание (функция), формализуются программно реализуемыми в вычислительной среде модулями (ЭСМОУ). Совокупности модулей (ЭСМОУ), сформированные по правилам общей математической теории контекстно-свободных языков [24], составляют предложения, абзацы, страницы ит. п., однозначно воспринимаемые ЭВМ.
Сигналы, выдаваемые машиной человеку, обладают несколькими признаками разной степени различимости и могут неоднозначно воспринимаются как единое целое. Как правило, из всего множества сигналов выделяются основные, так называемые опознавательные признаки, которые человек способен воспринять опера-
но. Только в случае ухудшения условий восприятия опознава- ьных признаков человек рассматривает сигнал более детально и -сторонне. Вследствие этого человек в различных условиях может '-разному воспринимать одну и ту же совокупность сигналов. При кой форме общения степень понимания человеком результатов, лученных от ЭВМ, т. е. качество общения в канале ЭВМ ->че- век, в настоящее время практически оценить не представляется зможным [12].
г Вместе с тем для уменьшения времени доклада обстановки (аль- нативного варианта) ЛОР необходимо эти сигналы-символы едставить в виде сигналов-изображений. В проектной работе — о чертежи, в военном деле — карты обстановки. Общая форма ких представлений информации называется графически-стовесными мам и (ГСС).
: Такая форма представления выбрана не случайно. Пропускная особность зрительного канала примерно в 10 ООО раз выше, чем ухового. Фонетизация накладывает ограничения на скорость -реработки информации, которая не превышает 120—150 слов в ми- ту. Неэкономичной является и запись информации. Например, и текст, записанный математическими символами, занимает одну раницу, то словесное_изложение его, как правило, занимает детки страниц.
В свою очередь, значительно большей эффективностью по сравнена с символической записью обладает запись с помощью картин, ем, карт обстановки, при которой вслед за зрительным восприя- ем почти молниеносно появляются внутренние умозаключения. ■~е великий позиограф Лейбниц завещал создание универсального иного и понятного для всех «картинного письма».
В настоящее время эта идея реализуется как один из способов шода/ввода информации с помощью светового пера графических сплеев, и методов новой иероглифики. Как следует из обзора стояния и перспектив развития ЭВМ, наиболее перспективным ляется позиграфический метод общения человека с машиной, при отором ввод и вывод информации будут осуществляться с помощью афических представлений. Предполагается, что в 80-е годы обще- ие в^каналах человек-^-ЭВМ на 90 % сведется к обмену образами и "мволами и лишь на 5 % — речевой сигнализации.
Картинное изображение, являясь многомерным сигналом, может 1ть насыщено значительным объемом информации. Оно позволяет ередавать человеку достаточно полное описание реальных объектов аиболее экономичным и оперативным способом. Благодаря связям жду элементами изображения общей информационной модели как руктурного целого, автоматически создается избыточность, повы- ающая надежность и обеспечивающая высокую помехоустойчивость информации.
* Однако графический способ представления информации имеет раницы применения. Это прежде всего зависит от точности оценки "гулируемых величин при воспроизведении и восприятия изобра- ения, ограниченной техническими возможностями конкретных
устройств. Как правило, в процессе управления требуется точное знание конкретных величин. Картинное изображение обстановки должно дополняться цифровыми значениями установленной точности.
Следовательно, для повышения оперативности, надежности и качества общения в линии ЭВМ->-человек информация, получаемая в (ЭСМОУ), должна выдаваться в двух формах:
позиграфический в виде ГСС на данный момент времени, обеспечивающей оперативность восприятия информации;
буквенно-цифровой в виде таблиц ПИД/ПВД, обеспечивающей точность восприятия информации.
Эти требования определяются пятнадцатым следствием:
С л е Дрс т в и е 15. Информация в линии ЭВМ->-человек должна выдаваться в двух формах — позиграфической и буквенно-цифровой, обеспечивающих соответственно оперативность и точность восприятия.
Примером вывода информации в позиграфическом виде являются графики загруженности ЛОР и ЛПР. С точностью до минут по ним трудно регламентировать работу, поэтому графики должны дополняться таблицами, содержащими, с нужной точностью временные интервалы.
Очевидно, что каждое нарушение человеком или автоматом условия (1.5), установленного требованием организации работы в реальном масштабе времени, нарушит ритм или снизит качество функционирования работы системы. При этом будет строго зафиксировано, в какой момент и по какой причине допущен сбой (брак), и выведена на оконечное печатающее устройство справка. Математическая модель (СМОУ) спрогнозирует и количественно оценит ущерб, связанный с допущенной ошибкой (браком).
Разработке математического аппарата, позволяющего количественно оценивать эффективность функционирования в реальном масштабе времени систем различного назначения (и прежде всего ГАП) в зависимости от соблюдения (нарушения) установленного режима, и посвящена настоящая книга.
Выводы
1. На современном этапе развития науки и техники невозможно рассматривать создаваемые аппараты, механизмы, формирования и другие структуры изолированно, как самостоятельные изделия.
Успех создания практически любого изделия, каким бы простым на первый взгляд оно ни казалось, зависит от рассмотрения его как системы в рамках системного подхода. Использование этой концепции! потребовало коренного изменения взглядов на организацию производства и разработку!новой техники.
|
Исходными при создании новой техники стали не средств а, а ц е л и, для достижения которых начали разрабатывать комплексы определенным образом сформированных элементов, т. е. с и с т е м ы. Таким образом, основой разработок являются системы, а не отдель- |
|
|
| ||||
|
Принцип системного подхода |
Следствие | ||||||
|
Номер и наименование |
Обозначение |
Формулировка |
Номер |
Обозначение |
" « Формулировка | ||
|
'■ J^Z* ^Лл. . Первый — целеобу- словленности |
|
|
|
|
| ||
|
Второй — относительности |
|
|
|
|
| ||
|
Принцип системного подхода |
Следствие | |||||
|
Номер и наименовани |
е Обозначени |
е Формулировка |
Номе |
Обозна- ;Р чение |
Формулировка | |
|
Третий — управляемости |
|
|
|
|
| |
|
Четвертый — связанности |
|
|
|
|
| |
|
| ||||||
|
Пятый — моделируемо сти |
]
|
Управл¥ейТ^5стема доМна
|
|
] |
| |
|
Шестой — симбиоз - ности |
|
|
|
|
| |
|
Седьмой — оперативности |
|
|
|
|
| |
|
CD О Продолжение табл. 1.4 Таблица 1,5 Типовой спецификатор работ при проектировании системы № п/п |
Содержание (этап) работы |
Используемый < ПСП > или следствие |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
4 |
|
|
|
5 |
|
|
|
6 |
|
|
|
7 |
|
|
|
|
|
|
|
9 |
|
|
|
10 |
|
|
|
11 |
|
|
|
12 |
|
|
|
13 |
|
|
|
14 |
Дублируется |
|
изделия, входящие в них. Даже детали (компоненты) аппара- ы рассматриваются как своеобразные микросистемы. Экономические оценки производятся теперь только на уровне ем, а по отдельным изделиям — в рамках системы. Структура промышленных организаций должна строиться по инципу подсистем, особенно это касается систем ГАП. Прикладные инженерные дисциплины рассматриваются как эле- нты, нанизанные на каркас, создаваемый системным подходом. Появились специалисты новой профессии — системотехники, они собны организовывать работу коллективов разнородных специа- стов и использовать для решения сложных системных задач зна- я из многих -отраслей науки и техники.
Концентрированным выражением свойств кибернетических тем и одновременно набором руководящих правил для их иссле- ания и проектирования являются принципы систем- го подхода,
Существует обширная литература, посвященная их изложению нализу. Однако общепринятая классификация принципов отсут- ует. Задача сравнительного анализа всех известных определений ставилась. Предложены формулировки принципов системного хода как законов, проявляющихся в форме операционных пра- и отражающих накопленнный опыт. Для удобства использова- я принципы и следствия из них объединены в табл. 1.4.
Совокупность принципов и следствий из них сформулирована ерархически упорядоченной последовательности, следуя которой работчик может построить систему, удовлетворяющую требовала системного подхода.
Последовательность этих действий может быть объединена в ти- вой спецификатор работ, используемый как ин- умент для определения соответствия элементов и в целом системы П требованиям необходимых и достаточных условий построения ременных гибко управляемых систем. Степень подробности спе- икатора работ зависит от иерархического уровня епгпринадлеж- ти. Разработчику или руководителю работ в качестве базо- г о может быть рекомендован спецификатор, представленный абл. 1.5.