

1.5. Принцип связанности
Сравнительно недавно считалось, что создание автоматического промышленного предприятия, функционирующего без прямого участия людей, практически неосуществимо, так как число нужных связей для организации его работы измеряется астрономическими цифрами. Формально это так. Любой из рассматриваемых компонентов производства является подсистемой иерархически более высокой системы, в которую он входит составной частью. Эта старшая система ставит ему цель функционирования, а для нее цель формирует система еще более высокого уровня. Цепочку целеполагания можно продолжить и далее. Поэтому формально ни для одной конкретной системы нельзя точно и строго сформулировать задачу управления, не поднимаясь при этом до самого высокого уровня, требующего вводить в рассмотрение социально-экономические факторы глобального масштаба. Так проявляется один из концептуальных признаков большой системы — связанность систем (подсистем), требующая при рассмотрении конкретной системы или управляемого контура, которым она может быть представлена при описании в виде иерархии управляемых контуров, учитывать все связи ее с другими системами (контурами).
В то же время в соответствии со вторым (ПСП) любая из подсистем может рассматриваться и как самостоятельная система. Именно с таких позиций элемент ГАП (например, система для производства крепежа) должен проектироваться и разрабатываться, а в последующем функционировать в составе большой системы как самостоя-
ельный
элемент. Для правильного проектирования,
построения и атем гармоничного включения
в общую структуру старшей системы акого
элемента необходимо уметь «вынимать»
управляющий контур
-Л '
Определяется четвертым принципом системного подхода — принципом связанности:
Система, выделенная для самостоятельного исследования^ должна быть управляемой по отношению к старшим и управляющей по отношению к младшим в иерархическом отношении системам.
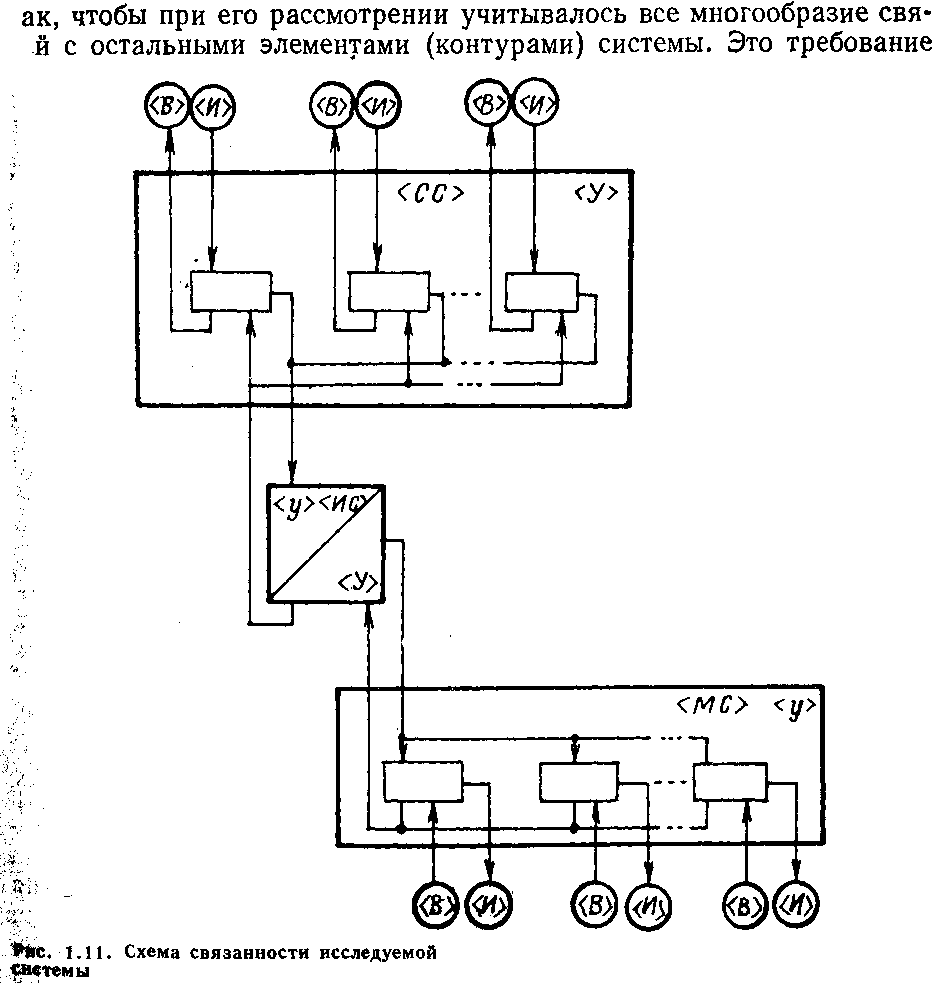
Это означает, что выбранную для исследования систему необходимо рассматривать так, чтобы все связанные с ней системы были группированы в два уровня: старший и младший (рис. 1.11). Со бороны старшего уровня от всех связанных с (ИС) систем поступают параметры целеполагания. В свою очередь, исследуемая система должна вырабатывать для всех младших систем параметры целепсь лагания и контролировать правильность и своевременность их pea. лизации. Таким образом, для самостоятельного рассмотрения системы в ней должен выделяться механизм связанности.
реализация первого концептуального свойства кибернетической системы — управляемости — требует умения выделять механизм управления в виде управляющего контура (см. следствие 6 и рис. 1.6). Для реализации второго концептуального свойства — связанности системы — необходимо уметь выделять механизм связанности, который определяется восьмым следствием:
J Следствие 8. В системе, выделенной для самостоятельного исследования, должен присутствовать механизм связанности в виде совокупности трех частей: старшей системы, исследуемой системы и младшей системы, соединенных линиями прямой и обратной связи.
Третьим ПСП и его следствиями установлено, что для изучения конкретного процесса управления необходимо уметь представ- дять его в виде иерархии управляемых контуров (см. рис. 1.6). Чтобы этот процесс изучать не изолированно, а в тесном взаимодействии с другими контурами всей иерархической структуры, из которой он выделен, в нем наряду с механизмом управления должен присутствовать механизм связанности. Следовательно, в модуле, предназначенном для описания управляемых систем, которые выделяются для самостоятельного изучения, эти два механизма должны быть гармонично объединены. Такое объединение приводит к понятию модуля единичного контура управления ((ЕКУ)), представленного на рис. 1.12. В общем случае в схеме функционирования (ЕКУ) старшая, исследуемая и младшая части сами последовательно становятся то управляемой*(у), то управляющей (У) частями соответствующего контура управления (рис. 1.12,fa).
Щ Для самостоятельного рассмотрения конкретного единичного процесса структуру (ЕКУ) можно упростить, распространяя условия перехода из управляемого состояния в управляющее только на (ИС). В|этом случае все системы старшего иерархического уровня можно представить в виде обобщенной системы (СС), которая для данной (ИС) всегда является управляющей (У), задающей в течение всего цикла функционирования параметры целеполагания (рис. 1.12, б). Параметры целеполагания от всех подсистем, входящих в старший иерархический уровень, объединяются в обобщенный ПИД исследуемой системы и выполняются как единое производственное задание.
Исследуемая система является старшей для всех младших подсистем, которые также можно представить в виде обобщенной системы (МС), являющейся по отношению к (ИС) всегда управляемой (у). Вырабатываемые (ИС) параметры целеполагания для младших систем объединяются в общий ПВД и рассылаются в процессе фактического функционирования по принадлежности конкретным подсистемам.
Представление (ИС) в виде (ЕКУ) наиболее полно реализует требование организации управления по вертикали путем формиро-
всех управляющих воздействий, приходящих он старших , в едином для (ИС) перечне исходных данных, а всех выхо- х управляющих воздействий для младших в иерархическом *ии систем — в едином для (ИС) перечне выходных данных. >именительно к ГАП программного продукта объединение вхо- :х и выходящих управляемых воздействий в единых исходном ) и выходном (ПВД) формулярах позволяет реализовать одно ущественных требований построения структуры системы по мо-