

I Принцип моделируемости
принципы системного подхода распространяются только на вляемые системы, т. е. системы, способные изменять свою ктуру и характер поведения в зависимости от изменения задан- цели. При этом изменение системы должно происходить так, конечный результат достигался при оптимальных или хотя бы эобразных затратах ресурсов, т. е. наименьшими усилиями, требование наиболее полно характеризует цель создания ГАП. ' эсть подразумевает изменение, и не просто изменение, а только ^которое наилучшим образом удовлетворяет условиям сложивши обстановки. ^
|о&никает следующий вопрос: как выбирать поведение (измене- ^ которое приводило бы к желаемой цели с минимальными затра- усилий в нужный момент времени. Такой выбор осуществим io в случае, если можно моделировать характер поведения си- прогнозируя и количественно оценивая альтернативные |нты достижения конечной цели. Сравнение эффективности аль- явных вариантов позволяет выбирать для практической реа- тот из них, который в заданный срок обеспечивает достиже- т при минимальных (оптимальных) затратах ресурсов. Это 1ет, что в структуре любой системы, которой предполагается ' занно управлять, необходимо иметь механизм пробирования (моделирования) характера ее поведения 1йчных условиях обстановки. Таким механизмом является мо- fr системы. Модель^может^существовать в самых различных фор-
^пример,
у водителя автомобиля модель закодирована
в виде некоторого на- j
осознанных
и интуитивных представлений. Опытный
водитель, сам того не правая, непрерывно
и многократно моделирует дорожную
обстановку и выраба- характер своего
поведения по управлению автомобилем
так, чтобы обеспе- :
безопасность движения. При этом
минимизация затрат ресурсов проявляется
'"иональности числа его управляющих
воздействий, необходимых для разре- йя
дорожной ситуации. В простейших условиях
такое управление происходит Лектор но.
Однако, если спросить водителя,
благополучно разрешившего дорожную
ситуацию, почему его поведение было
таким, а не иным, он строго обоснует свое
поведение.
На
кораблях, самолетах и других объектах
с ярко выраженным характером управления
моделирование поведения системы
осуществляется особой службой. Например,
штурман корабля делает предварительную
прокладку курса следования задолго до
выхода в море. Он оценивает различные
варианты и выбирает наилучший. В процессе
фактического плавания он продолжает
моделировать (прогнозировать) характер
движения корабля. При этом штурман
оценивает, как реализуется заданная
цель (например, заданный срок прибытия
в порт назначения при минимальном рас-
ходе топлива), и в зависимости от условий
плавания (штормовой, ледовой обстановки
и т. п.) производит прогнозирование
характера поведения корабля на оставшемся
участке плавания. Без такого непрерывного
прогнозирования (моделирования) ни один
начальник не разрешит плавание, ни один
капитан не рискнет в него отправиться.
В данном случае модели могут быть
реализованы в совокупности технических
средств, в том числе в специализированных
ЭВМ.
Специальный механизм прогнозирования необходимо иметь практически в любой управляемой системе. Если руководители отдельных предприятий пока еще обходятся без него, полагаясь на свой опыт и интуицию, то ГАП без прогнозирования будет нерентабельно.
Эти требования определяет пятый принцип системного подхода, называемый принципом моделируемости:
Управляемая система должна содержать в своей структуре модель прогнозирования во времени состояний для выбора наилучшего поведения, обеспечивающего достижение заданной цели при минимальных затратах ресурсов.
Механизмом прогнозирования является модель управляемого процесса, протекающего в определенных условиях, которые задаются внешней средой. В общем случае модель может отличаться от оригинала масштабом или темпом протекания процессов. Она может быть иной физической природы и опираться на формальное сходство, например, уравнений, описывающих управляемый процесс оригинала и модели. Модель может быть и весьма упрощенной, позволяя тем не менее изучать очень сложные объекты и системы, поскольку в ней сохранены те черты оригинала, которые существенны для круга изучаемых явлений (принцип минимаксного построения моделей). Так как в современных условиях управление, как правило, осуществляется с помощью электронных вычислительных средств, типичным является использование математических моделей, особенности построения и применения которых описаны в работе [21 ].
СМОУ должно включать в себя такие математические модели, которые обеспечивают выработку альтернативных вариантов достижения заданной цели при оптимальных затратах ресурсов. Это требование определяется одиннадцатым следствием:
Следствие 11. В управляемой системе должен присутствовать механизм моделирования в виде математической модели, обеспечивающий выработку рекомендаций для оптимизации достижения заданной цели.
ятый
(ПСП) и следствие 11 подчеркивают важнейшее
значение рления и изучения внутренних
и внешних
противоречий
системы ее моделировании и
оптимизации
как средства их разрешения, кт оптимизации
составляют структура и поведение
системы. ш отношении можно считать, что
на втором этапе проектирова- и исследования
системы (при применении второго (ПСП))
формуются лишь допустимые варианты
структуры. Выбор целесооб- ого из них
требует оптимизации, для чего тщательно
должны проанализированы внутренние и
внешние противоречия си- на этой основе
сформулированы соответствующие
математиче- е модели и решен комплекс
оптимизационных задач. Аналогично шие
в управляемой системе моделей
прогнозирования позволяет изовать
опёрежающую оптимизацию, когда содержание
управля- х воздействий учитывает не
только фиксируемое, но и прогнозное
состояние системы и среды, в которой
она функционирует, онец, на разных
этапах жизненного цикла могут решаться
разные оптимизационные задачи, что
также должно быть преду- зено при
разработке комплекса математических
моделей системы, кедствие 11 было
предопределено еще первым (ПСП) (след-
е 2). Действительно, обеспечить контроль
за ходом процесса мощью функции вида
(1.1) невозможно без использования мате-
ических моделей, реализованных в
управляющей ЭВМ. Виды матических моделей
весьма разнообразны. Они могут представ-
Jb
собой
функциональные зависимости, графики
или уравнения определения характеристик
процессов, протекающих в системах, "ицы
переходов систем из одних состояний в
другие и т. п. По- оение математических
моделей в рамках предлагаемых операцион-
правил системного подхода существенно
упорядочивается за выделения элементов
системы методом (ЕКУ). Каждая система
"система), выделенная в рамках (ЕКУ),
имеет один обобщенный в виде ПИД и один
обобщенный выход в виде ПВД. Цель про-
I, заданная в ПИД значениями параметров
целеполагания, пре- "зуется
математической моделью в результат
(продукт), форма- ванный спецификатором
в форме ПВД. Математическая модель
процесса в целом должна строиться по
тому же иерархическому Зципу, в
соответствии с которым система
расчленяется на эле- ы для самостоятельного
изучения и проектирования в виде
Элементы этой модели (модули) должны
обеспечивать преоб- эвание во времени
исходных параметров, заданных ПИД, в
вы- дные, определенные в ПВД. 1; В работе
[21 ] обосновывается понятие СМОУ и
показывается, Фо не всякая математическая
модель может рассматриваться как ^го
элемент. Это с очевидностью вытекает
из следующего развернутого определения:
СМОУ —
совокупность правил формальной и
№орческой переработки информации,
накопленных обществом в «Йде алгоритмов
и программ, реализованных в вычислительном
комиксе, отражающих объективные
законы развития реальных провесов
и достижений науки, представленных в
форме, позволяющей ^Каждому конкретному
индивидууму их непосредственно и
своевре-/.
Иерархия модулей
Рис.
1.14. Структура модуля СМОУ
менно использовать в повседневной практике управления для обработки информации в целях оценки обстановки, выработки количественно обоснованных планов, мероприятий для их реализации, коррекции планов в реальном масштабе времени в зависимости от изменений внешних и внутренних условий, выработки мероприятий для реализации откорректированных планов в процессе достижения цели при минимальных затратах ресурсов.
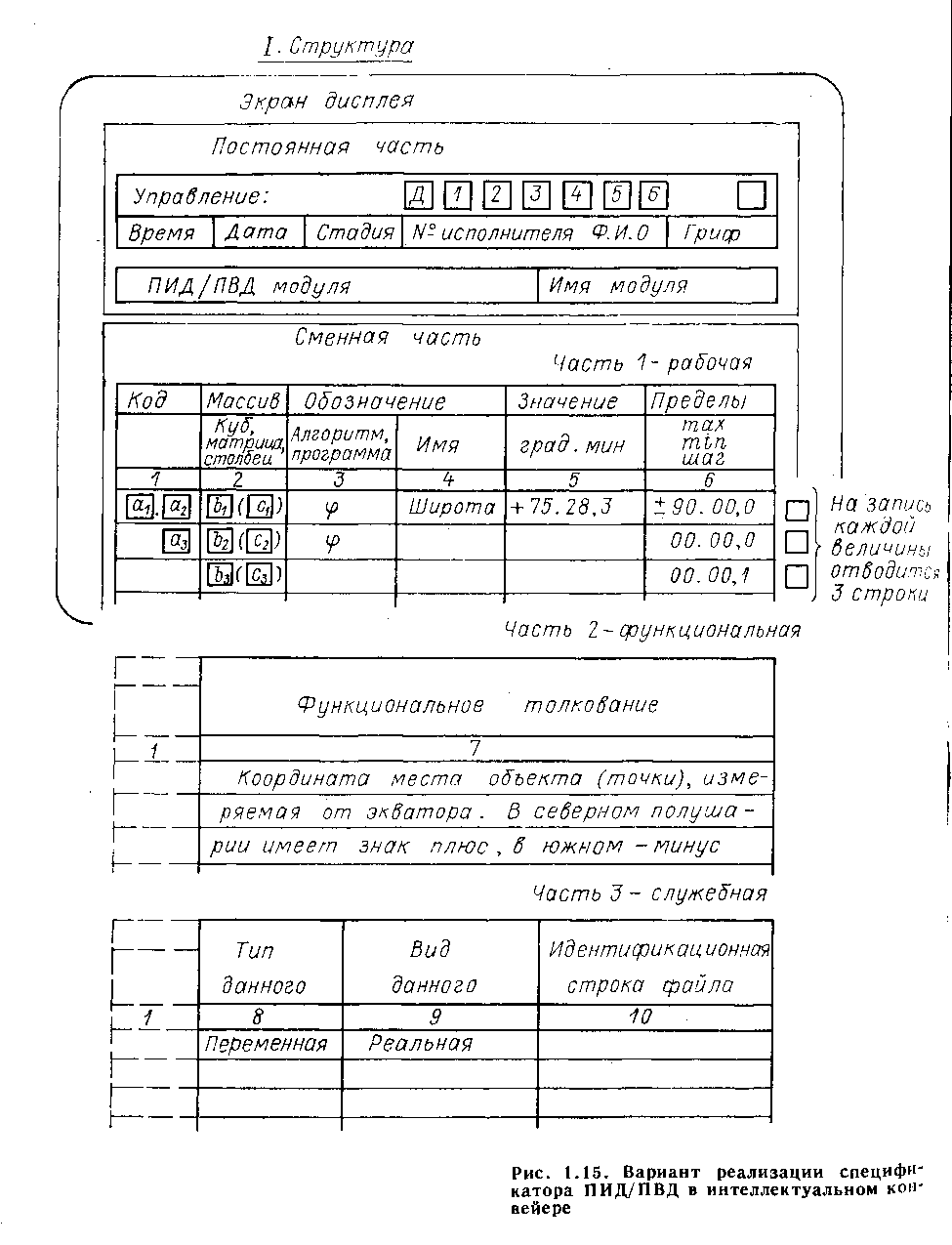
Типовая структура модуля математической модели как элемента СМОУ представлена на рис. 1.14, реализация типового" спецификатора ПИД/ПВД — на рис. 1.15.
Модуль — часть целого, которая выполняет заданную функцию и служит единицей измерения для придания соразмерности целому и его частям.
Свойства модуля:
функциональность (прозрачность, очевидность) — реализация функции, понятной пользователю. Критерием выделения функции является возможность построения по выходным параметрам законченного (автономного) образа;
реальность — представление исходных (ПИД) и выходных (ПВД) данных в виде измеряемых величин, понятных пользователю;
|
надежность — выполнение с заданной вероятностью в течение всего периода эксплуатации функций, определенных ПИД. Надеж- |
|
|
|
| |
|
Щк' |
|
|
|
|
|
|
-If' >■-: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l/l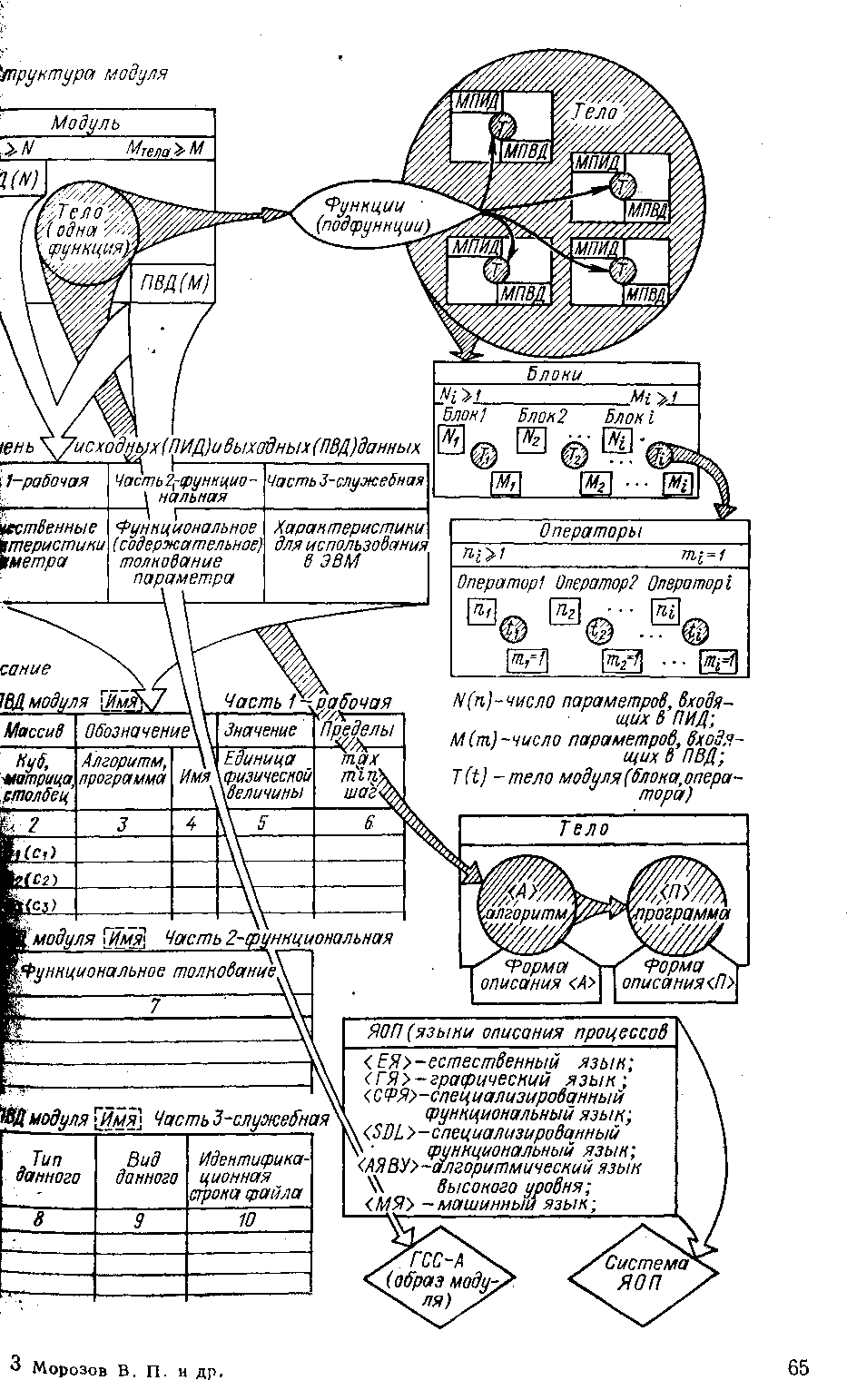
|
Як* |
|
|
|
|
ш. |
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
ность достигается доступностью для тестирования, организацией системы периодического тестирования;
4) структурная полнота — содержание минимального набора сервисных модулей, обеспечивающих удобство использования, понимание динамики функционирования, автоматизацию тестирования;
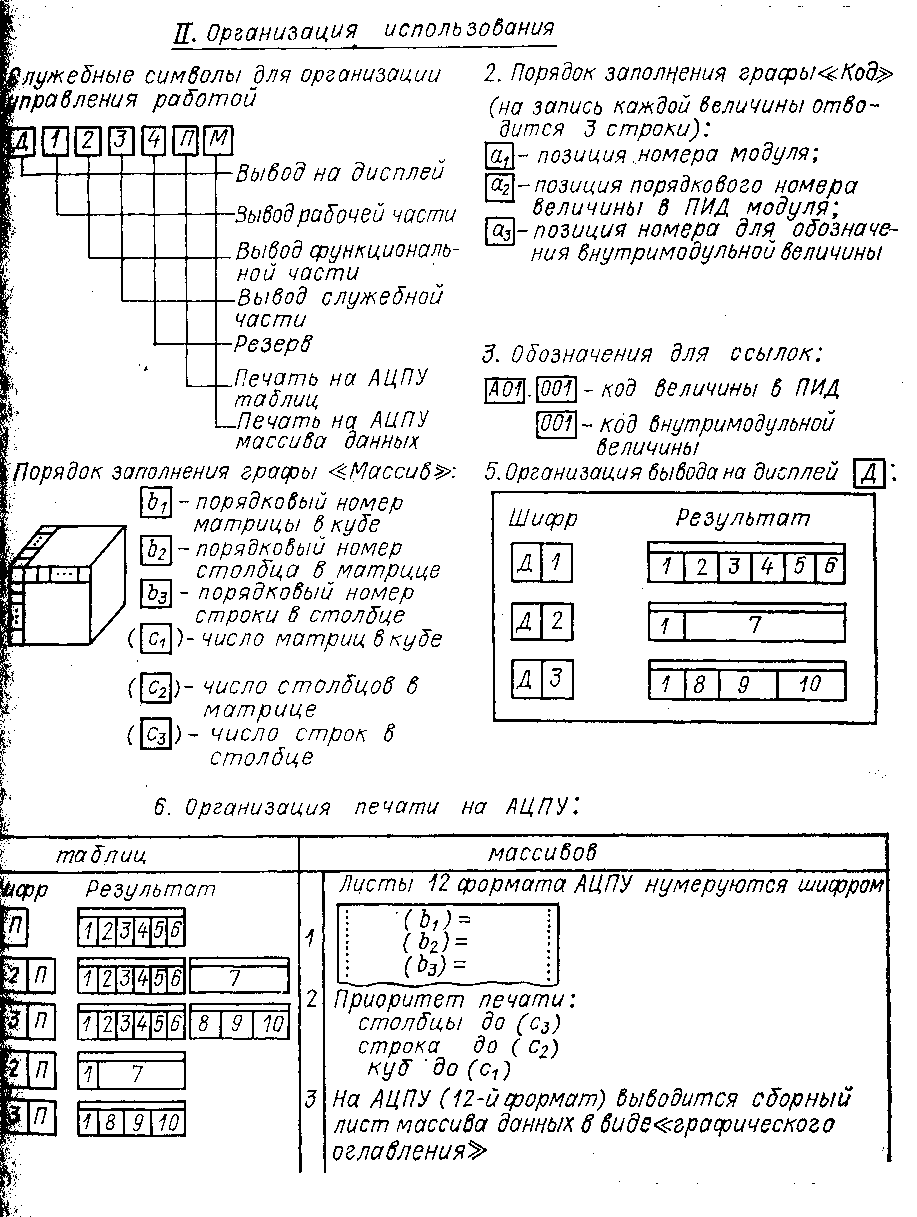
б) автономность — возможность использования в любой вычис- тельной среде независимо от конкретной ЭВМ, базового информационного поля, операционной системы; 6) управляемость — возможность с помощью управляющих приз- ков, входящих в ПИД, автоматически изменять структуру модуля Целях сокращения числа выполняемых функций (подфункций),
.3* 67
точности вычисления и времени реализации в заданной вычислительной среде;
иерархичность — возможность использования (разработки) отдельных элементов модуля (блоков \ операторов 1) как самостоятельных модулей;
интеллектуальность —возможность в условиях использования ЭВМ объединения искусственного и естественного интеллектов (формальных рекомендаций модуля и творческих замыслов человека — пользователя);
транспортабельность — возможность передачи по заданному каналу связи.
Модуль математической модели в общем случае имеет три основных элемента: ПИД, тело, ПВД (рис. 1.14). В элемент СМОУ модель, реализуемая телом модуля, входит лишь одним из функциональных элементов, общий состав которых представлен на рис. 1.16. Чтобы выполнять функции элемента СМОУ в полном объеме приведенного определения, основная математическая модель, отображающая элемент реального процесса, должна сопровождаться, работать в в комплексе с рядом дополнительных моделей, реализующих следующие функции (рис. 1.16):
задание ПИД/ПВД с перфокарт, перфолент, телетайпа и дисплея в виде таблиц, образов, буквенно-цифровой информации;
оптимизацию выработки формально оптимальных решений;
организацию диалогового общения в канале человек^ЭВМ;
преобразование параметров, полученных в ПВД, в данные для построения картинного образа;
объединение формально оптимального решения, выработанного с использованием основной математической модели, с творческим замыслом человека;
дублирование основной модели набором дубль-модулей, позволяющих с различной точностью отображать реальный процесс в зависимости от выделяемых ресурсов памяти ЭВМ и времени решения;
выбор оптимального набора модулей из общего банка дубль- модулей, позволяющего промоделировать реальный процесс в течение заданного (отведенного) отрезка времени;
выработку параметров множества сигнальных признаков подсказки (СПП), обеспечивающих человеку понимание процесса, протекающего в математической модели, и результатов, полученных вследствие ее реализации;
накопление статистических данных, позволяющих организовать самообучение, совершенствование основной математической модели.
Знак
оо
на рис.
1.16
символически характеризует
неограниченность процесса
совершенствования моделей данного
функционального назначения. Здесь
находит отражение ленинская теория
позна-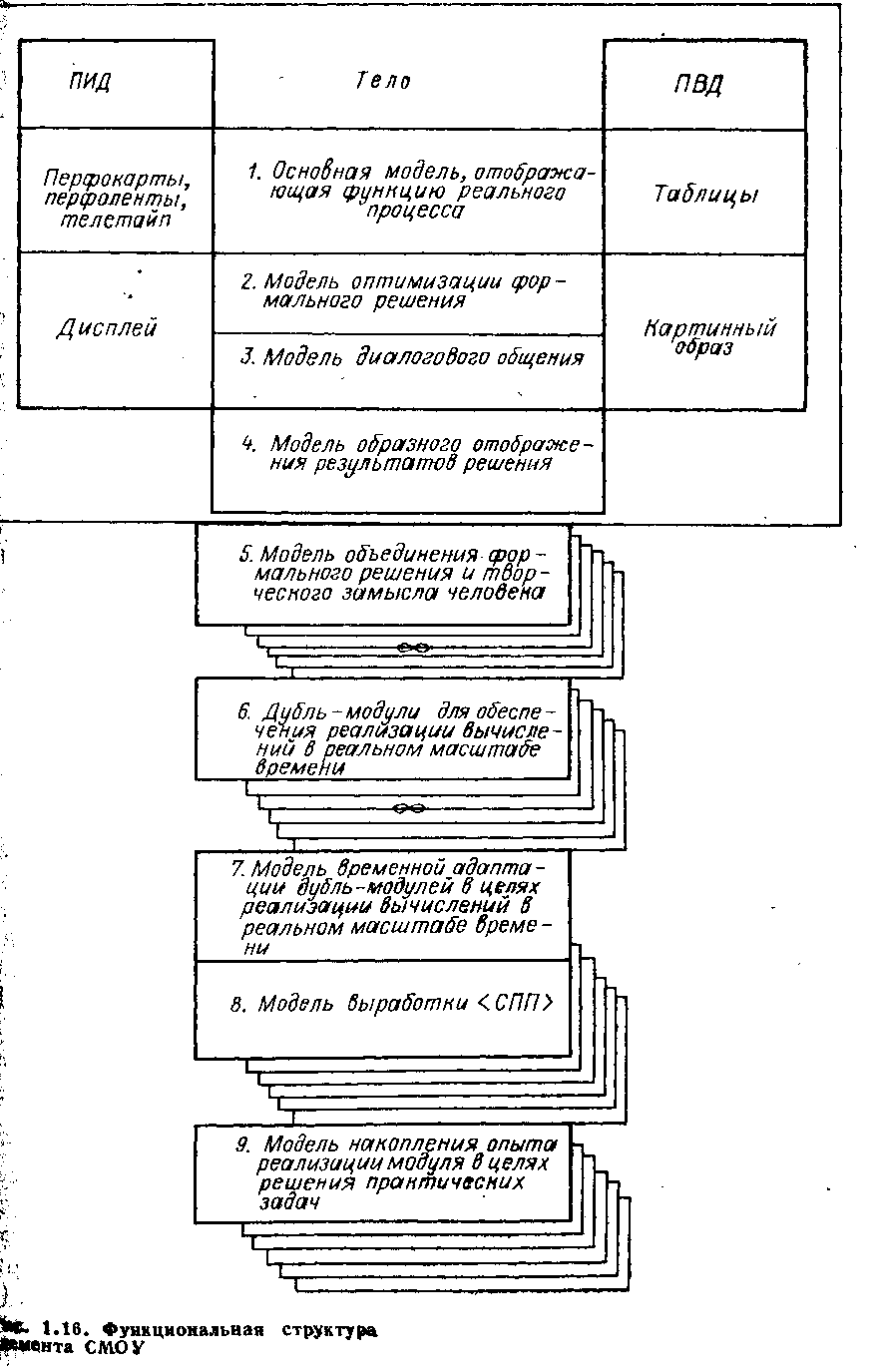
ния все более и более глубоких сущностей, когда по мере накопления знаний каждая последующая модель по сравнению с предыдущей более глубоко и всесторонне отображает (моделирует)уреальный процесс.
Такая функциональная сложность элементов СМОУ ((ЭСМОУ)) является следствием того, что, как будет показано в последующих главах, они представляют собой элементы искусственного интеллекта.
В простейшем случае, на первых этапах создания систем управления, (ЭСМОУ) могут функционировать в составе, показанном на рис. 1.14. При этом они вырабатывают показатели (ПВД), которые характеризуют процесс и используются для построения системы критериев, обеспечивающих выработку сигналов для регулирования поведения системы. Так, если для элемента ГАП, производящего крепеж, реализуется условие <оузад — Aw9 то должен вырабатываться сигнал тревоги, требующий принятия соответствующих мер для восстановления заданного ритма непрерывного безлюдного технологического процесса (см. рис. 1.3). В случае реализации условия > шзад + Aw вырабатывается сигнал о том, что число производимых изделий превышает допустимый нормативный запас. Этот сигнал может передаваться на пульт оператора, контролирующего протекание технологического процесса, для принятия им необходимых мер, а может использоваться и для автоматического регулирования организации производства (например, остановки работы соответствующего элемента ГАП до момента, пока критерий не примет нужного значения).
Такая примитивная организация управления ГАП, осуществляемая без участия людей, не обеспечивает качественного учета случайных факторов, которые, как правило, всегда сопутствуют функционированию больших систем.
Только объединение формальных рекомендаций, вырабатываемых математическими моделями, и творческих замыслов операторов, управляющих определенными участками ГАП, может обеспечить оптимальность функционирования гибкого автоматизированного производства. Построение математических методов объединения формальных и творческих рекомендаций в процессе управления ГАП — одна из задач книги.