

4. Принцип управляемости
; Целеполагание и структуру системы нельзя рассматривать в от- * тве от ее поведения, функционирования, как нельзя себе пред- авить изолированного, самостоятельного применения различных |>инципов системного подхода. В частности, формирование структуры системы соотносится с множеством ее целей. Применение второго (ПСП) и следствий 4 и 5 требует" не только выявления композитов системы, распределения их по уровням иерархии, но и уста- явления отношений целеполагания (субординации), фиксации свя- ;Ьй по управлению. Это и естественно, поскольку одним из элементов ;онятия структуры являются связи между компонентами системы.
f: Цели и структура функционирующей системы не являются статическими, застывшими, жесткими. В зависимости от складывающейся обстановки, возникновения новых задач, вариаций характеристик внешней среды и других факторов они могут и должны Заменяться. Динамичность целей и структуры подчеркнута уже р наименовании первого (ПСП). Целеобусловленность должна реа- дазовываться не только при разовом акте создания системы. Возможность реакции на изменения цели должна быть предусмотрена в струк- уре и способе^функционирования системы. Представление о дина- йчности структуры содержится и во втором (ПСП). Относительность здесь противопоставляется абсолютности не только как возможность различных трактовок исследователя, как относительность его взгляда на систему. В связи с динамичностью целей при функционировании относительность структуры, ее изменчивость, в противовес абсолютности (незыблемости), приобретает решающее зна-^ чение для обеспечения неснижающейся целесообразности системы, *
Рассмотренные требования обобщает третий (ПСП), называемый принципом управляемости:
Создаваемая система должна быть управляемой, т. е% способной изменять свое движение.
Под изменением движения системы понимается ее способность переформировывать свою структуру, переходить в различные состояния или менять способ функционирования под влиянием управляющих воздействий. В качестве таковых можно рассматривать 4 параметры целеполагания, а движение понимать в самом широком смысле, как всякое изменение системы во времени. Для реализации первого и третьего (ПСП) * в создаваемой системе должен присутствовать механизм управления. С учетом следствий 4 и 5 механизм управления можно представить в виде управляющей и управляемой частей, соединенных линиями прямой и обратной связи. Эти требования формализует следствие:
Иерархия
Рис.
1.6. Структура модуля управляемого
контура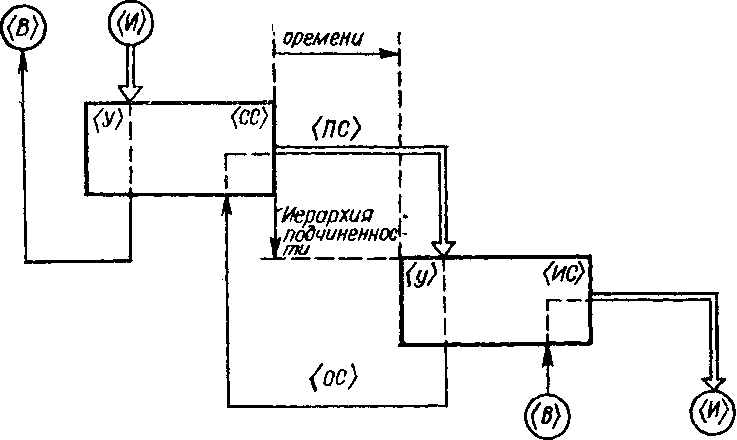
Следствие 6 .В управляемой системе должен присутствовать механизм управления в виде управляющей и управляемых частей, соединенных линиями прямой и обратной связи.
Для изображения механизма управления при графическом описании структуры управляемой системы предлагается использовать модуль управляемого контура, введенный в работе [21 ] и представленный на рис. 1.6.
Управляющая часть (У) контура соответствует старшей в иерархическом отношении системе (СС) по сравнению с исследуемой (рассматриваемой) системой (ИС), которая изображается управляемой частью (у). ►
Уступ смещения изображения младшей системы по вертикали вниз графически отражает иерархическое старшинство управляющей системы. Смещение младшей системы по горизонтали вправо графически отображает временную иерархию: исследуемая система может рассматриваться только после того, как будут рассмотрены действия старшей системы. Это означает, что прежде чем рассматривать (ИС), надо изучить, какая цель поставлена ей старшей системой. ^
1
лагания \Kr(t)}, входящие в функцию контроля (1.1), (1.2). линии обратной связи (ОС) передаются параметры {Хг(/)}, рмирующие старшую систему о фактическом выполнении млад- системой заданной цели. При графическом изображении входа хода линии прямой и обратной связи должны замыкаться, об- уя целевой информационный контур. Входы (И) и выходы (В) 1 информационных связей в блоках шей и младшей систем в соответствии с принципом относитель- и означают, что старшая и младшая системы только для данной ации (на данный момент) удовлетворяют этому определению, и сдвинуть рассмотрение иерархически влево или вправо, то авляющая Система может стать управляемой, а управляемая — авляющей.* На концах линий в кружках указываются адреса формационных связей тех систем, с которыми они модействуют.
На практике при графическом изображении модуля управляемого ~ура надписи, проставленные на рис. 1.6 ((ПС), (ОС), (У), (СС), (МС)), не делаются. Они приведены для усвоения пред- аемой структуры как элементы специализированного графиче- го языка, предназначенного для лаконичного и выразительного ставления основных требований рассмотренных принципов си- ного подхода и их следствий. Для кибернетических систем, на которые распространяются '"нципы системного подхода, управляемость является основным Sctbom. Следовательно, при исследовании и построении таких ем они должны представляться так, чтобы в первую очередь "но было просматривать механизм управления системой в целом "дельными ее частями. Одной из форм, удовлетворяющих этому :ванию, является представление структуры системы в виде йрхии управляемых контуров. Это определяет следствие: ."Следствие 7. Структура управляемой системы должна
ваться в виде иерархии управляемых контуров. {> В общем виде представление структуры системы в виде иерархии ~вляемых контуров для типового ГАП программного продукта ^да ППП) показано на рис. 1.7. .Уровень 1-й включает заводоуправление, 2-й — цехи проекти- ния, разработки и выпуска программного продукта, 3-й — Зизводственные линии, которые объединяются в цехи, 4-й — пси, из которых формируются цепочки производственных линий. ^Представление структуры в виде иерархии управляемых кон- " эв обозримо выражает систему управления в ГАП, когда модули азводства старших уровней (цехов) управляют действиями моду- Гнижнего уровня (линий). При этом сверху вниз (по линиям пря- * связи) идут команды управления, снизу'вверх (по линиям обрат-
виду
совпадения первых букв слов «вход» и
«выход» для обозначения входов и ходов
системы предлагается использовать
соответственно символы (И) и (В), аналогии
с обозначениями элементов входа (ПИД —
перечень исходных данных) выхода (ПВД
— перечень выходных данных) фундаментального
понятия модуля ПАпя
(элемента СМОУ), введенного в работе
[21].
QHdgodf)
п-р
г-
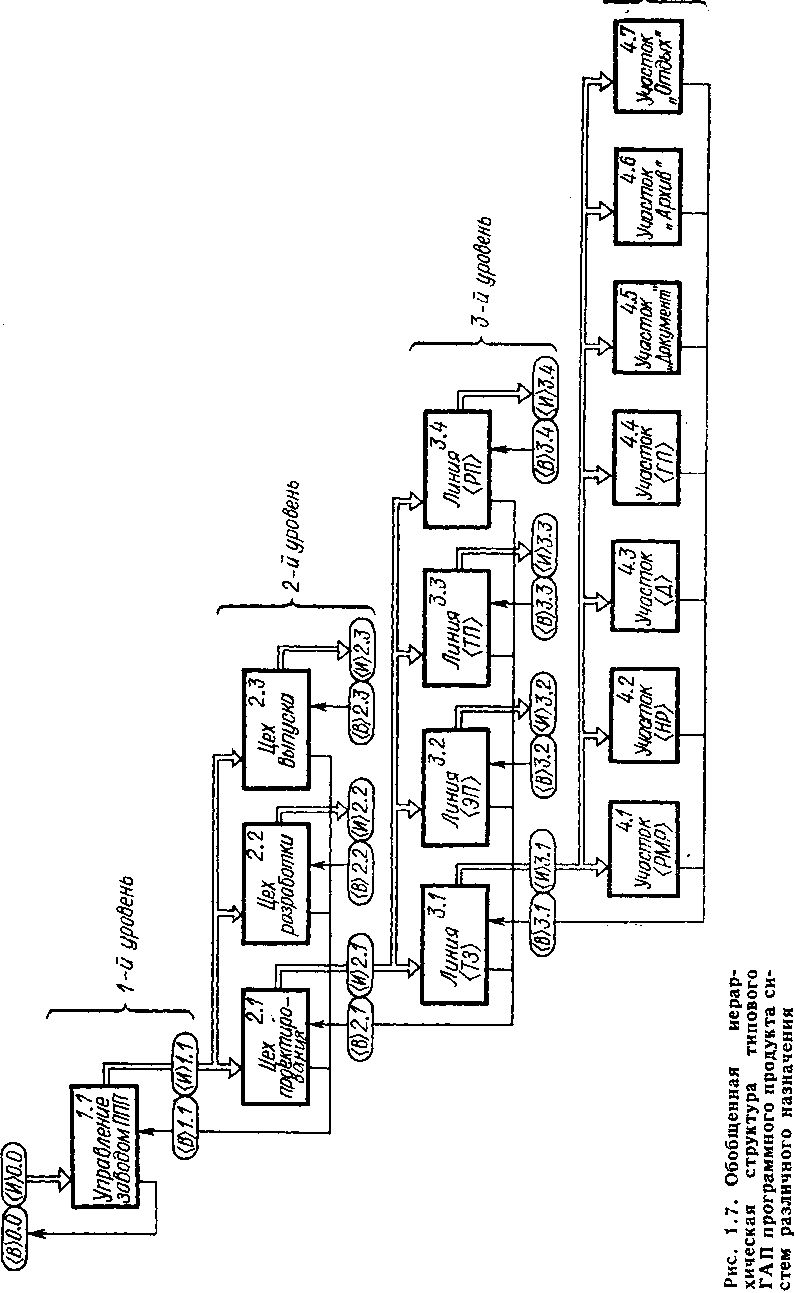
|й связи) — информация о их реализации в иерархически подчи- |нных звеньях. Обмен мёжду звеньями одного иерархического ^овня осуществляется только через систему вышестоящего иерар- |ческого уровня. В ГАП все управление должно осуществляться в виде обмена информацией между звеньями, участвующими в про- водстве, а в виде формализованных команд, поступающих из со- ветствующей старшей в иерархическом отношении^системы с уче- м информации о состоянии работы всех систем, входящих в ниже- оящий уровень. Такая организация позволяет организо-
ШГ
'^ОЩЮ
Рис.
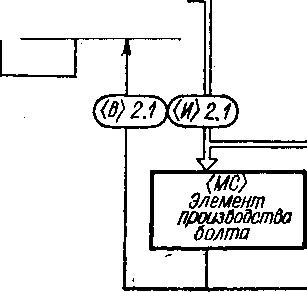
1.8. Структура элемента ГАП крепежной
системы, представленная в виде иерархии
управляемых контуров
Элемент,
.. комплектующий крепежную
систему
fem
Jpdcn'
гайки
ы
1ать управление только по вертикали, что Сокращает интенсивность информационных потоков, повышает на- ' нежность управления, адаптируемость структуры функционирования звеньев системы.
Конструктивность
представления системы в виде иерархии
управляемых кон- Туров видна из сравнения
структур ГАП крепежной системы,
представленных на рис. 1.5 и рис. 1.8.
Элементу, комплектующему крепежную
систему, задание выдает ^арщая система,
собирающая корпус изделия; задание
передается по линии управ- Яейия (прямой
связи) в виде необходимого числа болтов,
гаек и шайб (см. табл. 1.1), т»
е. параметров множества {/Сг
(t)}.
По линии обратной связи поступает
информация о фактическом характере
работы элемента, производящего детали
крепежной системы, т. е. параметры
множества {Хг
(/)}, также описанного в табл. 1.1. Управляющий
элемент крепежной системы, как старшей
в иерархическом отношении, выдает
задания на работу элементам ГАП,
производящим болты, гайки и шайбы, по
соответствующим линиям управления.
При этом в качестве элементов множества
Wr
(0}
выступают параметры целеполагания,
описанные в табл. 1.2. Очевидно, что при
таком описании структуры системы четко
указывается, кто
кому
задае
т
работу,
кто
и как
контролирует результаты работы, по
каким линиям и в каком виде поступают
команды (задания) на работу и информация
о том, как она выполняется.
Для формализации описания сложных иерархических структур в соответствии с обобщенной схемой (см. рис. 1.7) необходимо делать блочные срезы иерархических уровней. Типовая форма нарезки представлена на рис. 1.9.
Рис.
1.9. Иерархические срезы структуры
типовогб ГАП программного продукта
систем различного назначения
(обозначения те же, что на рис. 1.6): а —
срез 1-го уровня;
б
— срез 2-го уровня;
в
— срез III уровня;
г
— срез IV уровня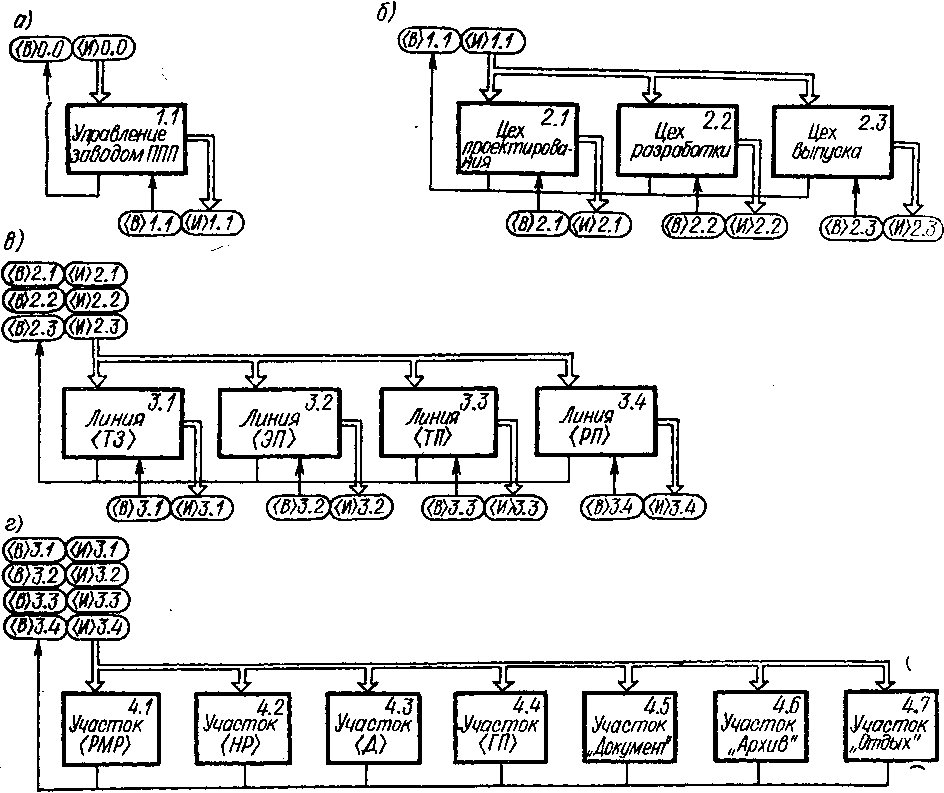
На
обобщенной схеме структуры типового
ГАП программного продукта можно
продемонстрировать контуры управления
только для головных элементов
иерархических уровней. Так, на рис. 1.7
показано, что головными элементами
являются: для 2-го иерархического
уровня — цех проектирования, для 3-го
уровня — лийия (ТЗ). Это значит, что на
схеме по рис. 1.7 можно проследить лишь
процесс управления элементами линии,
на которой разрабатываются технические
задания, всеми участками цеха
проектирования. Используя иерархические
срезы структуры (рис. 1.9), можно строить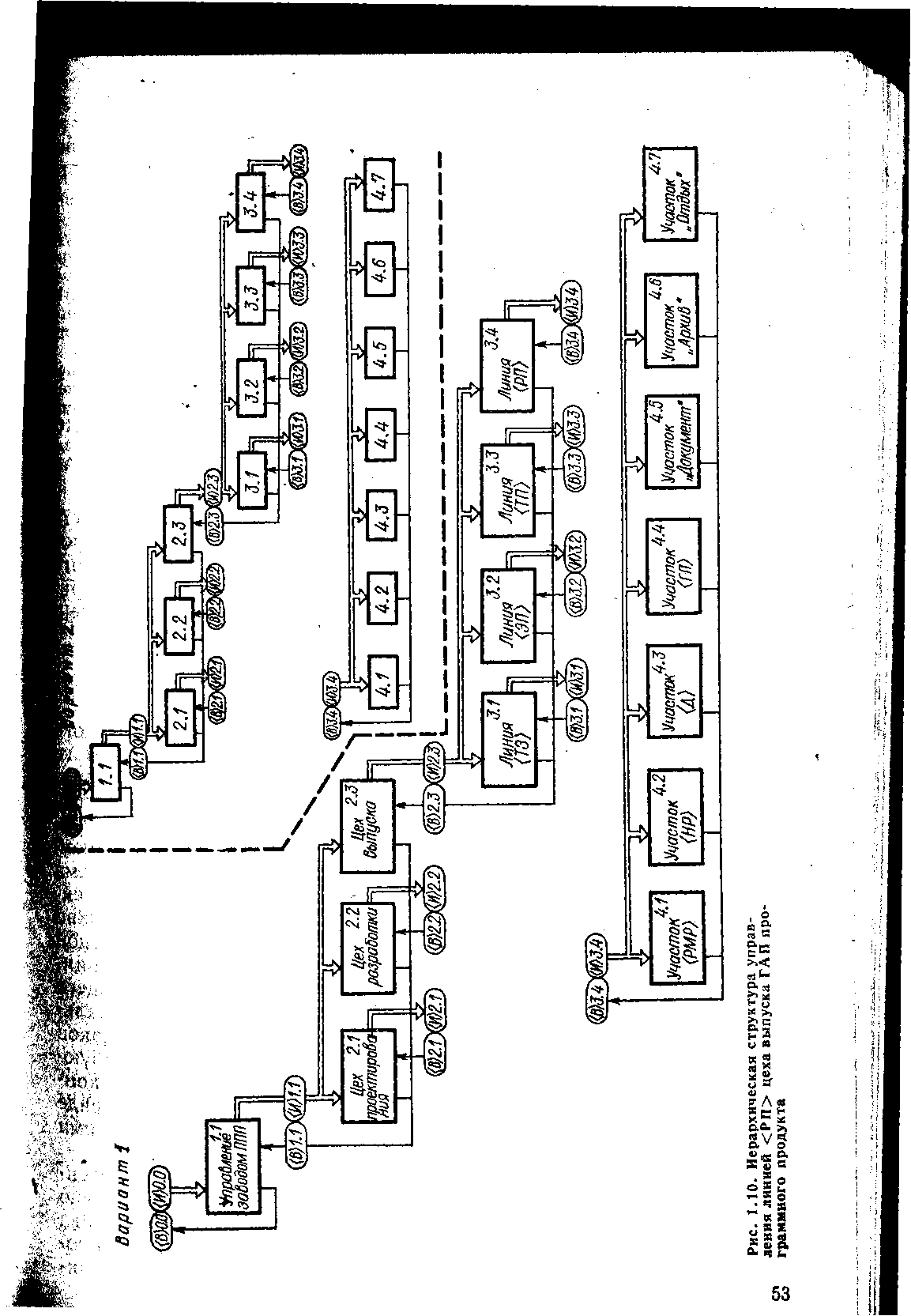
Например,
на рис. 1.10 показана структура управления
линией (РП) цеха выпуска программного
продукта.
Предложенная
графическая формализация представления
иерархических структур в виде
совокупности определенным образом
расположенных управляемых контуров
разработана с учетом последующей
автоматизации процесса документирования.
Так, нумерация по входам срезов элементов
структуры позволяет их сдвигать, чтобы
вписаться в нужный формат, не нарушая
наглядности и логики чтения схемы. В
данном примере такой сдвиг необходимо
было выполнить для 4-го иерархического
уровня (рис. 1.10, вариант 1).
Для
компактности представления схемы на
экране дисплея она может выводиться в
виде, показанном на рис. 1.10, вариант 2. С
помощью телекарандаша дисплея указываются
номера тех блоков, которые должны входить
в документируемую структуру управления.
Так, для получения схемы, представленной
на рис. 1.10, вариант 1, необходимо
телекарандашом отметить блоки 2.3 и 2.4.
Это означает задание команды:
«Построить схему управления линией
(РП) цеха выпуска ГАП программного
продукта».
Таким образом, принцип управляемости и следствия из него требуют выявить иерархическую систему управляемых контуров (с указанием параметров целеполагания и состояния для каждого из контуров) и сопоставить ее с данной системой, обладающей присущими ей целями, структурой, свойствами и функциями компонентов.