

УДК 007.5
Рецензенты:
д-р
военно-морских наук В. А. Абчук и д-р
физ.-мат. наук С. М. Ермаков
Морозов В. П., Дымарский Я. С.
Элементы теории управления ГАП: Математическое обеспечение.— Л.: Машиностроение, Ленингр. отд-ние, 1984.— 333 е., ил.
В
пер.: 2 р. 10 к.
В книге изложены принципы системного подхода, лежащего в основе проектирования и оптимизации больших систем, к которым относится ГАП. Дан анализ сущности, категорий: и структуры управления. Разработаны методы количественной оценки основных категорий, модели математического обеспечения важнейших структурных единиц процесса управления — циклов контроля, управления, выработки варианта и выработки решения. Рассмотрены методы оптимизации единичных конту* ров управления и их совокупностей.
Книга предназначена для научных работников, инженеров-системологов, специалистов по разработке математического обеспечения процессов управления. Может быть использована студентами старших курсов и аспирантами соответствующих специальностей.
Табл. 40, ил. 69, библ. 66 назв.
_
150201 ООО0-890 „„ 4Л
«ло.
М
038
(01)-84
КБ-29-14 1984
©
Издательство «Машиностроение». 1984 г.
ПРЕДИСЛОВИЕ
Принципиально новые возможности повышения эффективности промышленного производства во всех отраслях народного хозяйства открываются при переходе к организации технологических процессов, станочных линий и рабочих коллективов по принципам гибкого автоматизированного производства (ГАП). Основу принципов ГАП составляют:
использование методов управления, обеспечивающих оперативную перестройку (гибкость) производств;
внедрение в производство автоматизированных узлов управ* ления (станками, технологическими линиями, цехами," заводами и т. п.) в виде комплексов программного управления \ реализованных в ЭВМ различных классов (микропроцессорах, микро-, мини- и макро-ЭВМ); ? £ *
создание и внедрение новых методов, средств и устройств для резкого повышения надежности функционирования ГАП в целом и, в первую очередь, участков безлюдной технологии.
Успех массового планового внедрения ГАП в различные отрасли народного хозяйства во многом будет зависеть от того, насколько быстро наука в союзе с производством сумеет создать стройную теоретическую базу для проектирования и внедрения ГАП различного назначения. При этом необходимо решить следующие комплексы взаимосвязанных проблем.
I. Разработка методов управления.
Разработка общих методов построения математического обеспечения процессов управления ГАП.
Разработка методов количественной оценки основных категорий процессов управления ГАП! (оперативности управления и обоснованности принимаемых решений) и формулировка на этой основе комплексов оптимизационных задач для органов управления ГАП.
Исследование аспектов синтеза формального и творческого в процессах управления ГАП.
/ 4. Разработка методов количественной оценки не только оперативности и обоснованности, но и таких категорий управления, как ©хват, централизация, адаптивность и др. Расширение круга коли- 'ТЙг
■
комплексы
программного управления представляют
собой элементы «искус- енного
интеллекта»
и позволяют в сочетании с автоматизированными
средствами обеспечения организовывать
«безлюдные технологии».
чественно оцениваемых показателей эффективности управления в должно позволить сделать более полными комплексы задач внутренней и внешней оптимизации и тем самым более качественно отслеживать во времени изменение целесообразности систем и подсистем управления, в том числе и подсистем математического обеспечения процессов управления ГАП.
Разработка методов количественной оценки категорий управления для веерных, ромбовидных и других видов структур, а также многоуровневых систем управления ГАП. Разработка методов оптимизации функционирования таких структур.
Синтез подходов к теории активных систем [15] и методов исследования функционирования систем управления ГАП во времени. Оба направления служат разработке методов внешней и внутренней оптимизации систем управления, но учитывают различные стороны их функционирования. В теории активных систем процесс и циклы управления не рассматриваются, благодаря чему, например, подсистемы связи вообще выпадают из анализа; зато детальным образом учитываются характер поведения управляемых объектов, несовпадение их локальных критериев оптимизации с глобальным критерием, относящимся ко всей системе. С другой стороны, методами второго направления детально исследуется процесс централизованного управления во времени. Синтез обоих направлений должен обеспечить возможность исследования во времени процессов управления с различной степенью децентрализации.
Разработка методов решения задач оптимизации структуры многоуровневых систем управления ГАП.
Разработка методов оптимизации количественного состава систем ГАП, их сбалансирования на основе использования параметрических зависимостей «ресурсы — эффективность».
Разработка методов оптимизации структуры и состава математического обеспечения систем управления^ГАП.
II. Разработка элементов искусственного интеллекта промышленным способом.
Обоснование, выбор и освоение единого базового алгоритмического языка высокого уровня (АЛГОЛ-68, АДА) для разработки промышленным способом функционального программного обеспечения (ФПО) систем управления ГАП и программного обеспечения инструментальной поддержки технологии производства ФПО.
Разработка специализированных функциональных языков для описания процессов функционирования систем ГАП различного назначения в форме, являющейся наглядной, удобной и понятной соответствующим специалистам (функционалистам).
Разработка базовой технологии промышленного производства программного продукта (технологии ПППП) систем управления ГАП на основе алгоритмических языков высокого уровня и специализированных функциональных языков сверхвысокого уровня, обеспечивающей комплексную сквозную автоматизацию процессов проектирования, разработки, поддержания, сопровождения и модернизации ФПО
.Разработка программного обеспечения для функционирования автоматизированных поточных линий конвейерного типа, предназначенных для производства ФПО систем управления ГАП на базе специализированных функциональных языков, базового алгоритмического языка высокого уровня и табельных технических средств ЕС ЭВМ («Конвейер-I проектирования»).
Разработка технологии и программного обеспечения для автоматического погружения ФПО систем управления ГАП, созданного на «Конвейере-1 проектирования», в заданную вычислительную среду управляющих ЭВМ конкретных технических средств систем, узлов и блоков ГАП («Конвейер-II разработки»),
Обоснрвание и разработка единой унифицированной организации взаимодействия функционалистов, алгоритмистов, программистов, специалистов, обеспечивающих сопровождение ФПО (эки- пажистов), для проектирования, разработки, поддержания, сопровождения и модернизации программного продукта систем управления ГАП (методологии динамических групп). { У
Разработка методологии и программного обеспечения функционирования контрольно-организующих систем (КОС) для автоматизации процесса планирования и управления гибким автоматизированным производством программного продукта (ГАП ПП) систем ГАП различного назначения.
Разработка методологии и программного обеспечения для промышленного сопровождения программного продукта систем управления ГАП на базе мини-ЭВМ («Конвейер-III сопровождения»).
Исследование и разработка комплекса стандартов и нормативных показателей для научной организации планирования и управления промышленным производством программного продукта ГАП.
Обоснование и разработка методологии, учебных пособий и лабораторной базы для подготовки, переподготовки и обеспечения профессиональной квалификации кадров, занятых в промышленном производстве программного продукта систем управления ГАП (специалистов ПППП), способных работать в условиях функционирования автоматизированных поточных линий конвейерного типа («интеллектуальных конвей ров»).
Решение обоих комплексов проблем должно быть направлено на резкое повышение надежности функционирования систем ГАП в условиях их массового внедрения.
Настоящая книга посвящена разработке первого комплекса проблем, преимущественно в части математического обеспечения протекающих в ГАП процессов управления. Другие проблемы будут Освещены в последующих публикациях. Излагая общий перечень проблем, авторы надеются привлечь к их разработке широкий круг специалистов, работающих над созданием ГАП и в смежных областях.
Авторы выражают глубокую признательность С. Н. Халкио- пову, 'Ю. Г. Данилевскому, А. Н. Терехову, В. В. Земцову и О, Е. Климовой за предоставленную возможность использования их материалов при написании книги.
ВВЕДЕНИЕ
Научно-технический прогресс в области производства вступил в новую фазу своего развития — массового внедрения гибкого автоматизированного производства (ГАП), в основе которого лежит использование станков с числовым программным управлением, промышленных роботов и других механизмов, разрабатываемых и функционирующих как относительно автономные производственные единицы (технологические модули) в составе комплексных автоматизированных линий под управление
Каждая производственная единица имеет автономное прог управление. В свою очередь, линии, участки, цехи и т. п., комплектуются их этих технологических модулей, также имеют соответствующее программное управление. Это позволяет перенастраивать такие линии, участки, цехи сменой комплексов управляющих программ с единого центрального пункта управления.
В отличие от традиционных автоматизированных конвейерных линий, имеющих узкую ориентацию на изготовление определенного вида изделий и рассчитанных на массовое серийное производство, системы ГАП, комплектуемые из технологических модулей, управляемых единым распределенным вычислительным комплексом, позволяют образовывать сложнейшие, многоэтапные, иерархически упорядоченные во времени и пространстве производственные процессы, обеспечивающие выпуск серийных, мелкосерийных и единичных изделий дискретными партиями, номенклатура и объем которых могут меняться во времени. Это означает, что меняется суть организации промышленного производства.
Во-первых, производство становится быстро перенастраиваемым практически при равных затратах усилий на выпуск серийных, мелкосерийных и единичных изделий.
![]()
Q
А:'-
В-четвертых, сложная программа управления, разработанная для выпуска нового изделия, практически без дополнительных затрат ресурсов тиражируется и внедряется на аналогичные технологические модули, что существенно упрощает процесс подготовки квалифицированных кадров. Передовой опыт в виде новой, более прогрессивной программы управления может как бы автоматически внедряться на всех предприятиях страны, производящих аналогичные детали.
Создание ГАП требует разработки математического и программного обеспечения. Разработка комплексов программного обеспечения (ПО) для систем ГАП различного назначения представляет собой в настоящее время одну из важнейших и сложнейших задач научных коллективов. Для характеристики сложности задачи достаточно сказать, что, отражая структуру и функционирование обеспечиваемой (автоматизируемой) системы, каждый комплекс ПО сам представляет собой большую систему с присущими ей атрибутами целенаправленного поведения, иерархии, многомерности, многокритериальное™ и многообразия структуры и природы входящих в нее подсистем [40]. Поэтому теория больших (сложных) систем является методологической базой теоретических основ разработки ПО ГАП.
В настоящее время, особенно после выхода в свет работы [59], теорию больших систем (системологию) отождествляют с кибернетикой, которая ранее, по Н. Винеру, трактовалась более узко — как теория управления и связи. Считается, что понятие сложной системы стало единой концептуальной основой для кибернетики. Выяснилось, что отдельные направления кибернетики, в том числе теории надежности, информации, управления, самоорганизации и т. п., объединение которых в рамках одной науки ранее представлялось конгломеративным, исследуют различные качества одного и того же целостного объекта — сложной системы. Центральным среди этих качеств является способность к управлению, характеризующая не столько структуру, сколько поведение системы, возможность существования в ней актов решения, т. е. выбора из альтернативных вариантов действий. Некоторые авторы [59] именно по этому признаку — способности или неспособности систем к актам решения — делят их на сложные к простые. В свою очередь, в классе сложных целесообразно выделить большие системы, в состава тех или иных подсистем которых функционирует человек. Поведение больших систем направлено на достижение некоторого предпочтительного состояния, называемого целью системы. Естественно, что лишь большие системы обладают целями и только в них реализуются процессы управления, с помощью которых эти цели могут быть достигнуты. Несмотря на наличие обширной литературы, посвященной изучению различных качеств больших систем, закономерности управления ими, вопросы разработки и использования математического аппарата теории управления при проектировании этих систем (в том числе систем ГАП) и комплексов их программного обеспечения, особенности процессов управления в связи с созданием специального математического обеспечения (СМОУ) {211, методы
рШ^ямизации функционирования контуров управления, которые ||§8^а&уютея в любой большой системе в процессе ее разработки, ^^пользования и модернизации, — все эти проблемы исследованы
освещены еще недостаточно. ^ Что же является главным в организации промышленных ! .формирований, именуемых ГАП? Ответ на этот вопрос содержится в.фамом названии^— это гибкость. Многие авторы отмечают, Ято гибкость — одно из самых сложных понятий в концепции ГАП, второе вызывает яростную полемику [23]. При этом называют не- :^зу|ЬКО составляющих понятия «гибкость», которые представляются важными и очевидными: размер семейства (группы) деталей, скорость и трудоемкость перестройки.
характеристики являются лишь условиями (ограничениями), в которых проявляется сущность гибкости как «... способности fрезво оценивать обстановку, обстоятельства и приноравливаться к Ним» [54].
/ Предположим, что создано ГАП, обеспечивающее выпуск определенного размера семейства деталей при соблюдении заданных ^скорости и трудоемкости перестройки технологического процесса. При выполнении этих условий остается нерешенным вопрос: когда И йа основании каких данных перестраиваться? Чтобы принять та- решение, необходимо: оценить обстановку (спрос, потребность), тщрытъ содержание происходящего изменения обстановки, выработать план перестройки, определить перечень мероприятий для реализации выработанного плана, оценить срок перестройки. Если сопоставить перечень этих действий с теми, которые необходимо выполнить, чтобы принять решение на управление, то они совпадут. Следовательно, по своей сущности понятия (категории) гибкости Я управления достаточно близки, что с практической точки зрения позволяет считать их аналогичными. Значит, гибкость е£и> не что иное как управляемость (способность к у правку лению).
V Процесс сведения неизвестного (не изученного) понятия (явления) к другому понятию (явлению) или их совокупности, считающимся достаточно изученными, с позиций марксистско-ленинской диалектики является одним из методов научного познания.
Однако установления аналогии между понятиями гибкости и управляемости недостаточно для того, чтобы ответить на поставленный вопрос, так как сама категория управления разработана недостаточно, чтобы ее можно было описать с использованием математического аппарата. Об этом свидетельствует факт, что такие фундаментальные накопители научных зн-а-; Ний, как энциклопедические словари, до недавнего времени, вообще не содержали определения понятия управления [9, 65]. Правильное понимание сущности управления является центральным вопросом в проблеме построения современных систем гибкого автоматизированного производства.
i
I
I
автоматическим понимается производство без участия людей. Во всез^ описаниях ГАП толкуется как безлюдное производство. Однако в действительности человек в ГАП занимает центральное (ведущее) место: это операторы, наблюдающие с помощью АСУ за производством, наладчики (ремонтники) роботизированных оконечных устройств технологических линий, программисты, поддерживающие программные средства управления и разрабатывающие новые программы для освоения последующих изделий. Но главным звеном в ГАП является система управления, реализующая сущность гибкости, т. е. перенастраиваемость производства на выпуск продукции заданных номенклатуры, качества и объема. В системе управления ГАП технические и математические (программные) средства вырабатывают только информацию, на основании которой человек (управляющий, руководитель) принимает решения о перестройке и несет ответственность за ее реализацию со всеми вытекающими отсюда последствиями.
С этой точки зрения ГАП нельзя рассматривать как автоматическую систему и строить (проектировать) ее, используя только методы теории автоматов. ГАП необходимо классифицировать как кибернетическую, или большую систему, концептуально допускающую в едином процессе функционирования равноправное участие людей и технических средств. К тому же нельзя, с нашей точки зрения, ограничивать рамки ГАП отдельно взятыми предприятиями. Требование гибкости функционирования необходимо предъявлять и к объединениям, их совокупностям, производственно-территориальным комплексам, отраслям и экономике в целом. В этом смысле предметом рассмотрения в книге являются большие системы различных масштабов, которые можно назвать автоматизированными, но отнюдь не автоматическими. Проектирование, разработку и эксплуатацию таких систем можно осуществлять только с использованием принципов системного подхода. В настоящее время эти принципы разработаны еще недостаточно, чтобы ими можно было пользоваться как аппаратом создания больших систем. В гл. 1 делается попытка представить принципы (законы) системного подхода в форме операционных правил, отражающих накопленный опыт и пригодных для практического применения при проектировании, разработке и управлении классом больших систем.
Разработке и формализации понятия управления посвящена гл. 2. В ней анализируется сущность управления и его основных категорий, таких как оперативность, обоснованность, категоричность, охват, централизация, адаптивность, формальный и творческий подходы. Эти категории присущи только большим системам и, в первую очередь, звену «человек» в этих системах, организующему и реализующему акты принятия решений. Разработка, внедрение и использование таких систем, как СМОУ, позволит реализовать основные принципы системного подхода не только при проектировании больших систем, но и непосредственно в процессе управления ими в реальном масштабе времени.
I Разработки, выполненные в главах 1 и 2, являются новыми и анее нигде не публиковались. Они дают инструмент в виде законов Системного подхода, с покощью которого формализуется описание Сущности процесса управления (гибкости). В свою очередь, это позволяет создать один из вариантов математического описания процесса ^правления в виде совокупности базовых моделей, адаптируя которые под конкретные задачи, можно строить математический аппарат управления систем ГАП различного назначения. ;, В гл. 3 рассмотрены методы количественной оценки двух важнейших категорий процесса управления: оперативности и обоснованности. Эти категории находятся в диалектически противоречивой связи: для лучшего обоснования решений органу управления си- схемы ГАП Потребуется затратить больше времени, что снизит оперативность ее работы, и, наоборот, повышение оперативности может уменьшить время, отводимое на процесс обоснования решений, что неизбежно .скажется на их качестве. Путь разрешения этого проти- ^речия — формулировка и решение соответствующих оптимизационных задач. Отсюда ясна важность представленных моделей оперативности и обоснованности.
Положение с этими двумя категориями неодинаково. Оператив- Щрть имеет ясный физический смысл и может измеряться либо числом 4|уов решений в единицу времени, либо, что еще проще, обратной
Ш
я определения оперативности необходимо тщательно проанализировать вариант организации работы органа управления ГАП с управляемыми объектами, составить граф выполнения работ по обоснованию, принятию и передаче решений, выяснить законы распределения продолжительностей различных этапов управления на графе if. найти на нем критический путь, характеризующийся максимальным ожидаемым или гарантированным временем выполнения всех работ. При этом, конечно, необходимо для каждого из этапов определить оптимальный режим работы, при котором та или иная вероятностная характеристика времени его выполнения минимальна.
Сложнее обстоит дело с обоснованностью. Методы формализации и определения обоснованности в литературе почти не рассматривались. Авторам известны лишь два предложения по этому поводу, конспективно сформулированные в работах [21, 47]. В работе [21] предлагается измерять обоснованность по относительному отклонению между значениями критериев эффективности управляемого процесса для принятого и оптимального решений. Как показано в гл. 3 настоящей книги, этот подход страдает многими недостатками. Главный из них — возможность его использования лишь для ретроспективного анализа обоснованности, когда тот или иной процесс Управления уже закончился и может представлять лишь исторический интерес. Кроме того, при таком подходе обоснованность оказывается непосредственно не связанной с параметрами организации работы органа управления, что не позволяет совместно рассматривать обоснованность и оперативность. В отличие от этого подход, предложенный в работе [47], фиксирует такую связь через число
альтернативных вариантов решений, которые успевают рассмотреть лицо, принимающее решение (ЛПР), и лица, обосновывающие решение (ЛОР). К сожалению, неучет многих других факторов и существенная зависимость от субъективно задаваемых величин делают подход, рассмотренный в работе [47], также малопригодным для использования. Более перспективным, возможно, окажется подход, развитый и описанный авторами. Он базируется на определении обоснованности как вероятности выбора правильного (приближенно оптимального) решения. Осторожность оценок в определении перспектив использования этого метода не случайна и обусловлена недостаточной исследованностью проблемы. В то же время его применение дало возможность сформулировать комплекс оптимизационных задач, решение которых позволяет оптимальным образом спланировать работу органа управления.
Гл. 4 посвящена рассмотрению моделей планирования, с помощью которых решается широкий круг задач, возникающих в процессе управления ГАП: прогнозирование характеристик управляемых процессов, протекающих в ГАП, развития технических средств ГАП, потребностей в изделиях различных видов; оценка эффективности и выбор целесообразных способов использования средств и подсистем ГАП, а также ГАП в целом; оптимизация календарных планов функционирования ГАП; оптимизация состава подсистем и сбалансирование ГАП. В главе приведены новые разработки по моделям оптимизации и сбалансирования состава ГАП.
-
Г:
4
.Г\
1
*
\
но было бы комплектовать задачу соответствующей совокуп- ью модул ей-дублеров, "стремясь к достижению максимальной юности результата, получаемого за время, не превосходящее данного. Именно такая оптимизационная задача рассмотрена гл. 5, причем под целесообразной организацией СМОУ понимается илучший вариант комплектации модулями-дублерами. Уместно етить, что терминология в этой области еще не установилась, рвоначально авторы называли модули-дублеры дубль-модулями, я сокращения в книге используется наименование «фэм», что под- ^ кивает функциональную эквивалентность модулей-дублеров. По- ^льку, однако, не менее важным является требование и информа- ^нной эквивалентности, этот термин также нельзя признать вполне ^чным. Проф. О. В. Сосюра предлагает наименование «модуль- ;йник». Возможно, наилучший вариант наименования будет £дложен .читателями книги.
10дин из подходов к синтезу формального и творческого в процессе ^ботки решений описан в гл. 5. Идея подхода была впервые ; жена в работе [21 ]. Детализация ее в настоящей книге показы- "^г, что дело сводится к разработке методов решения специфи- Ifcnx оптимизационных задач, в которых могут быть зафиксирован значения произвольной части параметров управления. Суще- ^ иным моментом является также целесообразность включения ф|$сему обоснования и выработки решений модулей «подсказки» " шмендаций) для лиц, принимающих или обосновывающих реше- которые помогают им в целенаправленном поиске решений, "Формальных не только в рамках используемых математических моделей и критериев (формально оптимальных), но и с точки зрения _ЩВР (творческих).
6 посвящена рассмотрению моделей цикла контроля. Расширены методы контроля по одному и нескольким параметрам 1ния с помощью специально конструируемых функций оценки е;гва управления. Основное внимание уделено контролю по гнозируемым значениям параметров состояния. Именно контроль с упреждением позволяет оценить необходимость Коррекции ранее принятых решений и время, которым располагает Для этого орган управления. Отметим, что наиболее простым и В то же время наименее типичным является контроль по одному параметру состояния. Это и понятно. Ведь управляемые системы ГАП в большинстве своем являются многоцелевыми, характеризуются множеством целей и получают в соответствии с этим от системы верхнего уровня задание по множеству параметров целеполагания. Многопараметрическое управление, как fи многопараметрический контроль, представляет собой сложную задачу. В связи с этим важно искать ситуации, в которых многопараметрический контроль может быть сведен к контролю по одному параметру или, во всяком случае, по существенно меньшему числу параметров,* нежели в исходной задаче. Оказывается, такие ситуации есть. Две|из них рассмотрены в гл. настоящей работы. В обеих с помощью перехода на более высокий уровень моделирования (уровень целеполагающей системы) удается получить объективные оценки важности параметров целе- полагания и либо резко сократить их число, либо даже свести контроль к одному параметру.
Задачи, рассматриваемые в главах 5 и 6, ориентированы на оптимизацию функционирования единичного контура управления «ЕКУ», т. е. простейшей двухуровневой системы, в которой имеется орган управления и управляемая система, и сов о~к у~п- н о с т и <ЕКУ>, которая образуется внутри органа управления ЛПР и несколькими группами ЛОР. Во втором случае система управления также является двухуровневой, но орган управления вырабатывает решения для нескольких управляемых объектов. Каждый из них входит в отдельный <<ЕКУ>, число которых определяется числом управляемых объектов. В литературе такая система управления известна под названием веерной, но рассматривается под другим углом зрения, а именно [15]: какова общая эффективность системы и как вырабатывать оптимальное решение на верхнем уровне, если каждый из управляемых объектов обладает правом принятия решения, руководствуется при этом своими критериями и поставляет органу управления агрегированную (обобщенную) информацию о своих решениях и состоянии. Это — важное, но самостоятельное направление исследований. Нас больше интересовали вопросы определения целесообразной продолжительности цикла управления и оптимального распределения этого времени между процессами обоснования решений. Идя по этому пути, можно рассчитывать на получение максимально обоснованных решений, а ^также требований к временным характеристикам работы системы и каналов связи.
Есть еще одна сложность в построении ГАП — отсутствие опыта. Можно предположить, что первыми гибкими автоматизированными (то есть управляемыми с использованием человека) системами были войсковые.формирования. Во все времена войсковые формирования строились по принципу функциональных модулей: отделение, взвод, рота и т. д. Каждый модуль имел строго определенную функцию: пехотный, артиллерийский, кавалерийский и т. д. Модули (войсковые подразделения) гибко (т. е. оперативно) переформировывались в зависимости от условий меняющейся обстановки. Решение главной цели войсковыми формированиями (достижение победы в бою, операции, кампании) во многом зависело от организации управления, т. е. гибкости переформирования войсковых модулей с учетом изменяющейся обстановки. Именно в сущность процесса управления вкладывается содержание того, что требуется и от понятия гибкости: установить момент, когда надо производить переформирование, и каким по своему содержанию оно должно быть (как должна перестроиться структура исходных модулей).
Для организации управления современными как военными, так и промышленными системами необходимо организовать разведку (войсковую или промышленную) в целях добывания информации о противнике (фирме-конкуренте); вскрыть замысел противника
ирмы-конкурента); выработать план проведения операции (план, упреждающего выпуска продукции с качественно-стабильными характеристиками, > превосходящими характеристики продукта, вы- р мускаемого фирмой-конкурентом); добывать информацию о ходе г |боевых действий (состоянии производства у фирмы-конкурента и. Обстановке на рынке); вырабатывать соответствующие мероприятия ■flpo коррекции ранее принятого плана в зависимости от характеристик ^вменяющейся обстановки и т. п. И все это необходимо делать система- Штически, с определенной цикличностью.
Для организации управления промышленным производством стран СЭВ этот процесс отличается тем, что «добывание информации» Д о фирмах, производящих аналогичную продукцию, носит характер У планового обмена замыслами в рамках творческого содружества при -организации выпуска новых видов продукции, плановой перестройки £§ЙФирм, чьи изделия выпускались с устаревшими характеристиками.
ро сам процесс имеет тот же содержательный смысл: необходимо „ ^ V оценивать состояние качества выпускаемой^продукци]!,^^^^^ ^ рынке, своевре^нно^осущ^ствлять плановые ме£опд^тия^пд1_
Ч Модернизации произвП71^Тва! ~ "
Так^ор^анйзуеТСЯ промышленное управление внутри стран СЭВ. Если же говорить о сравнении с капиталистической системой произ- - водства, то закономерности построения для систем военного и промышленного назначения аналогичны друг другу. Поэтому, хотя большинство примеров, иллюстрирующих теоретические положения, ориентировано в книге на народнохозяйственные системы, часть из них относится к военным системам. Это не должно смущать читателя.
Ему следует рассматривать как синонимы: командир — руководитель, штаб — плановый орган, приказ — распоряжение и т. д. В отдельных случаях по тексту делается дублирование этих терминов, но в ассоциативном восприятии (независимо от того, делается дублирование или нет) их следует отождествлять. Впрочем, можно предсказать, что в недалеком будущем практически вообще исчезнет! различие между организацией военных и промышленных систем,! о чем наглядно свидетельствует опыт японской промышлен-j ности.
Общеизвестно, что наибольшее неудобство при чтении современной технической 'литературы вызывает обилие новых терминов, . которые вводят авторы. Особенно трудно читать книгу, когда после первого толкования термина в последующем изложении встречается eso аббревиатура. Следуя положительному начинанию одной из первых публикаций по ГАП [23], авторы также включили «Приня- тые сокращения». При этом они стремились сохранить все термины, предложенные в работе [23].
Новые термины, введенные авторами по тексту, приведены в ло- мацых скобках ( ). Они сформулированы на основании базовых терминов, определенных стандартами. В предлагаемой читателям книге нашли развитие отдельные фундаментальные понятия, изложенные в работе [21 ]. По этой причине понятия и обозначения
,введенные там, по возможности были сохранены и в настоящей книге.
Придавая большое значение позиграфическому (образному) методу общения и изложения физцческой сущности исследуемых процессов, авторы там, где это возможно, приводят «картинное» описание. Авторы надеются, что оно должно существенно облегчить понимание внутренней сущности процессов, усвоение и запоминание, а также оказать помощь при обсуждениях, докладах, лекциях.
Список литературы ни в коей мере не претендует на полноту охвата проблемы и является лишь перечнем материалов, использовавшихся авторами.Глава 1
ПРИНЦИПЫ СИСТЕМНОГО ПОДХОДА
ГАП как объект исследования и разработки является киберне- еской системой. Главное, что присуще ГАП, содержится в самом звании: сйстема является гибкой, т. е. способной изменять ю структуру и цель функционирования в зависимости от изме- ющихся условий обстановки. Реализация такой способности до- гается управлением. Это первая и основная черта кибернетиче- их систем, при рассмотрении которых необходимо учитывать: ную! взаимосвязь между большим числом факторов, определяющих едение системы; неопределенность-в поведении системы в целом составляющих ее частей, возникающую в результате влияния случных факторов и участия в процессе функционирования системы ^ей; наличие управляющих воздействий, благодаря которым ема, преодолевая неопределенности, должна «пробиться» к на- енной цели. Понятие кибернетической системы по отношению ГАП вводится для того, чтобы выделить способ рассмотрения по- дения управляемых систем с учетом всей присущей им сложности. ^Изучением свойств таких систем занимается системология, ме- ами проектирования, разработки и управления—системотех- Обе эти научные дисциплины призваны придать концепциям темного подхода стройность и завершенность научной теории, «ако эта проблема до настоящего момента все еще находится в соразработки и становления. Для решения вопросов проектиро- п*я, разработки и управления кибернетическими системами разматываются отдельные частные инструменты в виде практических 'омендаций по методам системного подхода. На основании обобщения этих рекомендаций предлагается вариант "ожения законов (принципов) системного подхода в форме опера- ~ных правил, отражающих накопленный опыт и пригодных для актирования, разработки и управления классом систем, к кото- относятся системы ГАП.
Свойства систем
« Понятие системы. Понятие системы в том виде, в котором оно гребляется в настоящее время, появилось в 50-е годы. Тогда ло ясно, что отдельное техническое средство, каким бы совершенным оно ни было, не в состоянии решить конечную задачу, что" только комплекс надлежащим образом согласованных технических средств и обслуживающих их людей имеет тенденцию вести себя как нечто целое. Так в новом содержании на свет появилось понятие «система», которое произвело едва ли не самые серьезные изменения в практике и организации инженерных разработок с тех пор, как началось массовое применение инженерного труда.
Прежде всего изменилось содержание понятия «разработка системы». Раньше главной задачей разработки было создание средства— самолета, корабля, танка, станка и т.д. Средство было предметом основного рассмотрения, конструирования, испытания и оценки. Все необходимое для оснащения этого средства подгонялось под него или проектировалось заново. Например, для самолетов или танков разрабатывались новые виды оружия или существующее оружие модернизировалось, чтобы оно было пригодным для данного средства. Новые станки встраивались в существующие технологические линии и зачастую не давали ожидаемого эффекта. ' Теперь первичным стало не средство, а цель, которая должна быть достигнута. Для достижения* выбранной цели стали формировать определенную совокупность технических и организационных средств с учетом обслуживающих их людей, которая способна реализовать эту цель, т. е. создавать систему. Тесно связанное с не- j обходимостью гарантировать достижение той или иной цели, понятие «система» послужило отправным пунктом для создания разнообразных методик выбора и конкретного определения цели, методов вычисления вероятности ее достижения в различных условиях обстановки, определения эффективности функционирования системы, стоимости ее разработки и многих других элементов, составивших сущность системного подхода.
Структура подразделений для исследования и разработки систем стала строиться по принципу составляющих подсистем. Выбор и оценку отдельных частей системы стали производить только в рамках системы в целом — с учетом ее взаимосвязей с другими системами. Для улучшения планирования и управления проектированием и разработкой систем были созданы специальные методы сетевого проектирования, которые известны,как системы типа PERT. Для разработки систем стали создавать комплексные коллективы, включающие специалистов различных профилей: инженеров, математиков, физиков, экономистов, химиков, психологов, социологов и др. Появилась необходимость готовить специалистов новой профессии, владеющих знаниями в области теории вероятности и математической статистики, математического программирования, электронных вычислительных средств, методов моделирования, технической психофизиологии и других смежных дисциплин.
Что же такое система? Понятие это широко распространено: «система Дарвина», «система Менделеева», «система Станиславского», «система вала», «система отсчета» и т. п. [11 ]. Давно известно и толкование понятия системы как «...составленного из частей объективного единства закономерно связанных друг с другом предметов,
влений, а также знаний о природе и обществе» [И ]. Этим термином бозначают также: 1) определенный порядок в расположении и вязи частей чего-либо; 2) форму организации чего-нибудь; 3) поря- ок, обусловленный планомерным, заданным расположением частей, рапример организацию системы расчетов; 4) совокупность принципов, служащих основанием для какого-либо учения; 5) форму общественного устройства; 6) совокупность частей, связанных общей функцией, например систему кровообращения; 7) совокупность Хозяйственных единиц, учреждений, организационно объединенных ^ единое целое; 8) техническое устройство, конструкцию; 9) то, что Цггало нормальным, обычным, регулярным, например утреннюю ^зарядку и т, д.
Р
В соответствии с приведенными
формулировками болт и гайку можно
рассматривать как крепящую систему.
Если к этой совокупности элементов
добавить &айбу и контргайку, получится
более надежная система крепления. Во
всем этом JpeT
сложности.
Но подготовка этой простой крепящей
системы для использования 3§ космической
среде (например, в атмосфере Венеры),
когда придется учитывать высокие
температуры и давления, коррозионно-опасные
влияния среды, параметры ВДщорой
известны лишь гипотетически, а также
последствия термических и механи-
^Дрёеких ударов, становится сложной
комплексной проблемой, -i^v
Такая
крепящая система существовала века.
Структура ее и сейчас не измени- '^'5яась.
Однако раньше не было необходимости
называть ее системой и рассматривать
всем многообразии с позиций системного
подхода. Проблема улучшения системы
Jp;
решалась,
как правило, отдельными людьми. Система
улучшалась постепенно, в те- ^ние веков,
в основном за счет улучшения материалов
и технологии изготовления деталей.
ftkv
/
Применение этой системы для космических
аппаратов нельзя рассматривать Ли
изолированно. Ее следует оценивать в
составе всего огромного космического
комп- ' лекса, предназначенного для
доставки аппарата к заданному космическому
телу, щЭто требует использования
обширного арсенала знаний, совмещения
функций раз- : Щ личных производств,
организации работы большой группы
коллективов. Кроме того, ЩШв сложная
система должна быть задумана, исследована,
разработана, проверена "^Гна образце,
испытана, оценена, модернизирована,
запущена в производство и вве- в строй,
как правило, в .короткие сроки.
На современном этапе как бы пропали простейшие механизмы, рриборы, формирования. Сложность решаемых проблем обусловливает необходимость создания особым образом организованных формирований, в которых они сами по себе теряют свое первоначально самостоятельное значение и могут рассматриваться лишь как часть более общего, целого, т. е. как система. Подчеркнем еще раз, что само название «система» для таких формирований применяется не столько для того, чтобы их классифицировать, сколько в целях выделения нового способа рассмотрения структуры и поведения комплексного объекта, основанного на учете всей присущей объекту сложности.
Таким образом, с точки зрения системного подхода объекты, входящие в данную систему, должны рассматриваться не сами по себе, не изолированно, а в связи со многими другими объектами и явлениями.
В практике это очевидно: ни одно живое существо, ни одна машина, какой бы совершенной она ни была, ни один коллектив не могут существовать вне связи со своим окружением. Но связи объектов в природе, обществе и технике широки и разнообразны/Изучить
и описать все эти связи при решении какой-либо конкретной задача практически невозможно, а теоретически — бессмысленно. Достаточно выделить только наиболее устойчивые связи, непосредственно и значительно влияющие на решение поставленной задачи и поддающиеся реальной оценке.
Вот для этой конкретной цели используется понятие системы в его особом значении — как совокупности конкретных объектов, существование и деятельность которых взаимосвязаны и взаимообусловлены в силу достаточно определенных обстоятельств. В системы могут объединяться самые разнообразные предметы: как неорганической природы (физические тела, геологические образования, химические вещества), так и органической (растения, животные, биологические образования), а также абстрактные представления (понятия, гипотезы, теории, знания). Практически состав системы не ограничен. Могут создаваться системы, включающие в себя в различных сочетаниях материальные предметы и абстрактные представления. Однако каким бы ни был состав элементов, главным свойством нового формирования, дающего ему право именоваться системой, должна являться его целостность, т. е. появление у данной совокупности объектов таких свойств, которых нет у каждого из них в отдельности.
Наиболее полно и последовательно свойства систем и один из вариантов математического аппарата для их изучения изложены в работе [59]. В ней системология рассматривается как наука о потенциальной эффективности сложных материальных систем, устанавливающая пределы их надежности, помехоустойчивости, управляемости и самоорганизации. Система определяется структурой я поведением. Под структурой обычно понимается инвариантная во времени фиксация связей между элементами системы, задаваемая с помощью графа. Под поведением (<функционированием) понимаются ее действия во времени. Изменение структуры системы во времени рассматривается как ее эволюция.
Под сложной будем понимать систему, способную вырабатывать решения, — в отличие от простой, не обладающей таким свойством. Сложную систему, в составе которой функционирует хотя бы один человек, будем именовать большой.
В мире различают три последовательно возникшие и взаимодействующие иерархии систем: физико-биологическую (атом, молекула, клетка, особь, стадо, популяция, биоценоз, биосфера), социальную (человек, коллектив, общество, сообщество, человечество) и техническую (орудие, машина, прибор, ЭВМ, комплекс). Объединение отдельных систем из разных иерархий или частей приводит к смешанным классам, отражающим свойства своих представителей. Системы ГАП, являющиеся предметом исследования в книге, представляют собой объединения из классов социальной и технической иерархий.
Закономерности развития. Установлено, что классы сложных систем с повышением их уровня в иерархиях обнаруживают следующие закономерности поведения [59].
В 1. Разнообразие (числа различных систем данного класса) воз- |шстает. " '
щ 2. Распространенность (число однотипных систем) убывает. Щ предельном случае наличествуют лишь единичные экземпляры си- |£тем высших уровней иерархии. Такие системы являются уникаль- гными.
i; 3. Сложность (число элементов и связей между ними, разнообразие реакций на внешние воздействия) возрастает. I 4. Устойчивость (способность системы противостоять внешним (возмущающим воздействиям) имеет тенденцию к понижению при ^переходе от физико-биологической иерархии к социальной и далее Ik технической. Устойчивость физических систем уменьшается, [II биологических возрастает с ростом их сложности. |f*f' 5. Эмергентность (степень несводимости свойств системы к свой- Щйам составляющих ее элементов) возрастает. #4 Указанные общие закономерности развития классов систем ИЮерархиях носят эмпирический характер и подлежат дальнейшему Щ^яению. Для нас представляют интерес две особенности:
вытекающее из общих закономерностей возрастание сложили и эмергентности систем при объединении их в смешанные Ийссы;
возможное возрастание устойчивости системы смешанного ■Нсса, комплектуемой из элементов различных иерархии. ^ШЩетод изучения. Современному читателю нет необходимости Шшазывать, что изучение большинства сложных, а тем более боль- 1||х систем путем прямых экспериментов над ними в целом невоз- сно, а над их частями вследствие эмергентности практически Я&юлезно. Известно также, что в этих условиях практически повсе- «Шно вместо эксперимента над системой проводят эксперимент над ЭЩ* ыя тематической моделью, которая строится для >г||Шания функционирования системы и реализуется в ЭВМ. Ш различают имитационные (портретные) и оптимизационные К моделям обоих классов предъявляется требование осуще- t^PtMocTH, которое в работе [59 ] формализуется следующим образом: С Ш^роятностью не меньше заданной величины Fq время достижения ,Д£ЛИ системой (в данном случае — время эксперимента с помощью #^тационной модели или время выработки рекомендаций по опти- .^$яьной структуре, оптимальному поведению системы) не должно ррйвосходить заданного значения Т0. Построение математических %Й>делей базируется на следующих трех принципах [59].
инцип формирования законов. Постулируются Р*$ществимые модели, а из них выводятся законы сложных систем.
Согласно данному принципу, теория состоит из гипотез, формализованных в виде математических моделей. Выводимые из них ^оремы (законы) должны допускать возможность проверки соответствия части следствий из них доступным для эксперимента характеристикам оригинала. Другая часть следствий может быть использо- Для теоретического прогнозирования соответствующих параметров изучаемой системы.
Соглашаясь с автором работы [59] по существу, его формулировку первого принципа, приведенную выше, нельзя признать удачной. При таком подходе теряется категория закона, а остается лишь постулируемая модель. Действительно, утверждается, что «...законы выводятся ... в виде теорем ... из моделей». Но то, что «выводится», т. е. получается с помощью того или иного логического формализма, не является, строго говоря, законом, а представляет собой, как справедливо отмечает и сам автор, теорему, следствие и т. п. Конечно, и теорема является отражением закономерностей и тоже может быть названа законом, но не основным. С другой стороны, модели, из которых «выводятся законы», как утверждает автор, постулируются. Такая формулировка недостаточна. В конечном итоге они действительно постулируются, но это в самом деле итог, результат отсеивания и выбора из совокупности ^мыслимых моделей одной. Нам представляется, что противопоставление здесь физикализма и сдотемологии не оправдано. Необходимо лишь отметить, что в физике отсеивание гипотез (поиск закона) ведется на основе эксперимента над самими системами, для которых ищется закон, а в систе- мологии — эксперимента над моделями систем. Та из моделей, с помощью которой удается объяснить и предсказать большинство фактов, наблюдающихся при функционировании больших систем, может считаться законом — до тех пор, естественно, пока не появится модель, объясняющая и предсказывающая большее число фактов. Таким образом, в системологии законами являются, по сути, модели. Поэтому более уместной представляется такая формулировка первого принципа:
Основным законом сложной системы является ее модель. Остальные законы выводятся из модели в виде теорем.
Это более строго согласуется с принципами, изложенными в работе [30], и подчеркивает, что система как объект исследования настолько сложна, а зачастую и уникальна, что может быть изучена только с помощью математических моделей и моделирования на ЭВМ. С другой стороны, из первого принципа вытекает, что модель сама является сложной или большой системой, отличающейся от оригинала лишь возможностью проведения над ней экспериментов.
Принцип рекуррентного объяснения. Свойства системы выделенного уровня объясняются исходя из постулируемых свойств элементов систем непосредственно нижестоящего уровня и связей между ними.
Таким образом, в моделях сложных систем в качестве исходных элементов должны рассматриваться достаточно интегрированные их подсистемы с заданными свойствами и связями между ними. При каждом восхождении на следующий иерархический уровень система предшествующего уровня делается элементом системы следующего уровня.
Принцип минимаксного построения .моде л е й. Теория должна состоять из простейших моделей систем нарастающей сложности. Каждая из них должна хотя бы в мини
-
тльной степени отражать каждый из нарастающих уровней слож- ости поведения систем.' Третий принцип является современным кибернетическим ва- |иантом принципа «бритвы Оккама» («не следует делать посредством эльшего то, чего можно достичь посредством меньшего») и утверж- ает, что математические модели систем должны быть простыми, ресмотря на свою неконструктивность (отсутствие указаний на то, £ак его реализовывать) этот принцип имеет большое значение, ориентируя исследователей на предпочтительность приближенного учета эльшего числа аспектов поведения систем (факторов) детальному ^гчету меньшего числа факторов.
При построении моделей сложных систем понятие о п т и м и- ационной модели является основным, так как основное войство сложных систем — наличие цели и необходимость достижения ее экстремальным образом. Формальное задание цели сводится заданию целевых функционалов для системы и ее модели соответ- гвенно. Определение экстремальных значений функционалов яв- яется основным содержанием оптимизационных моделей. Относи- £льность сложности системы приводит к понятию иерархии систем
![]()
следовательно, к иерархии целевых функционалов. || Для сложной системы характерно наличие а к та решения,! l*. е. в такой системе должен присутствовать механизм, о^уществля-1 Црш функции управления. ^ Реализация только одной цели в каждом контуре управления ^стически означает декомпозицию исходной системы и, следова- дано, декомпозицию оптимизационной задачи выработки управ- эщих параметров на подзадачи. В то же время декомпозиция |го процесса управления требует дополнительных средств для Эрдинации и согласования решений, вырабатываемых в механиз- jb реализующих функции управления.
1.1
соотношением Ес Ф 2 гДе Еа — свойства компонентов
*\1шетемы. Отмечена также зависимость интегративных качеств от ^руктуры системы S, системного (D) и реального (Т) времени, ;£ройств компонентов системы А и способа ее функционирования F, е. Е -
Ес (S, D, Т, A f F). Изучение эмергентных качеств пред-
^авляет большой интерес, поскольку позволяет выяснить, в че
м
и насколько сложная система отличается от конгломерата подсистем.
Система (целое) представляет собой единство определенного минимума своих частей, единство противоположностей компонентов А. Характеристика компонентов системы — важнейший этап описания ее свойств. В качестве компонентов могут выступать подсистемы и элементы (членение по расположению компонентов в иерархической структуре системы), а также предметы, процессы или отношения (членение по природе компонентов). Качественные особенности системы порождаются взаимодействием ее компонентов. Компоненты, несовместимые с системой или^дцуги^и компонентами, отторгаются системой, отмидают, уни^ожаются, наконец. Функционирование компонентов является!ПГГТШ^
лом в системе. Для сложных систем характерна неоднородность компонентов: одни выполняют основные функции, другие — обеспечения, третьи — функции управления и связи; В этом смысле можно говорить о многообразии природы подсистем и элементов системы, которая характеризуется их различным назначением и разнообразной физической сущностью. В заключение характеристики этого свойства сложных систем отметим, следуя работе [4], относительную самостоятельность компонентов системы. Компоненты, подчиняясь целому, «...обладают ... определенной степенью свободы... Самостоятельность частей, находящая свое выражение в их дифференциации, пространственно-временной локализации и специализации, — необходимая предпосылка взаимодействия частей, их сцепления в рамках целостной системы, зарождения и развертывания внутренних противоречий между ними, являющихся движущей силой всякого целостного образования».
Важнейшей характеристикой системы является ее структура S, т. е. внутренняя организация, устанавливающая способы взаимосвязи и взаимодействия компонентов, организацию выполнения функций целого в пространстве и времени (функционирования системы), реализацию отношений координации и субординации в системе. Являясь выражением «связи и размежевания» компонентов, структура «интегрирует, связывает, преобразует их, придавая общность, целостность и устойчивость системе» [4]. «Структура подвижна, динамична, .изменчива», следуя за изменением функций системы, ее компонентов и отношений с внешней средой. Для большой системы характерны многомерность, определяющаяся большим числом связей между ее элементами и подсистемами, и многообразие структуры, связанное с разнообразием структур подсистем, а также способов их объединения в систему.
Высшим смыслом существования системы является ее ц е- лесообразность Z, т. е. практическая достижимость ее целей. Любая система создается во имя достижения определенных целей. Другими словами, цель является одним из важнейших системообразующих факторов. Цели системы определяют цели компонентов: Z/ = Zj (Z) (j = 1, /), где J — число подсистем.
Необходимо подчеркнуть, что большие системы, как правило, являются многоцелевыми. Это определяется многообразием требова- 28
предъявляемых к исследуемой системе со стороны других си- . Под влиянием внешних условий целесообразность существовали системы и ее цели могут изменяться.
5. Формой существования системы является функционирование F. Оно направлено на достижение ее целей, определяет I поведение в различных условиях обстановки, является источником развития. Для описания функционирования необходимо задать 1боры функций системы и ее структурных элементов. Между ними |ществует иерархически упорядоченное соответствие. Влияние йешней среды, эволюция структуры и компонентов влекут за собой вменение состава и содержания функций системы, изменяют ее /нкционирование, поведение. Как отмечено в работе [59], к настоя- рму времени обнаружены следующие основные принципы усложняющегося поведения: а) вещественно-энергетический баланс (соблю- *ие законов сохранения); б) гомеостазис; в) самоорганизация на юве выбора и коррекции решений; г) опережающая реакция или ^адаптация, т. е. адаптация к возможным и предвидимым в буду- #' изменениях в условиях функционирования системы; д) рефлек- или опережающее отражение, возможное при взаимодействии гем с интеллектом и основанное на рассуждениях типа «он ду- что я думаю, что он думает...». >
к
Источником движения и развития системы являются в н у- енние поотивооечия
противоречия между компонентами системы, ^Учение внутренних противоречий позволяет прогнозировать развитие компонентов системы, связей между ними и их функций.
9. Источником формирования хистемы, ее целей и функций являются внешние противоречия (противоречия межд, системой и средой).
к г 10. Важнейшим свойством сложных систем является их способность к управлению и самоуправлению, обеспечивающая достижение целей. Содержание категории «управление» подробно анализируется в гл. 2. Здесь укажем лишь, что конечной задачей управления всякой системой, выраженной в самой общей форме, является достижение заданной цели с возможно большим полезным эффектом при наименьших усилиях и затратах. Этой качественной формулировке цели управления отвечает многокритериальная задача оптимизации, поскольку любой сложной системе с самого начала ставится несколько целей: максимизировать целесообразность системы с одновременной минимизацией расхода ресурсов различных видов. На практике дело сводится к отысканию компромиссных вариантов структуры и поведения системы, обеспечивающих наилучшее в определенном смысле удовлетворение этим противоречивым требованиям. В соответствии с принципами усложняющегося поведения управление должно быть динамическим, иначе невозможен даже гомеостазис, и осуществляться с прогнозированием — во всяком случае начиная с уровня систем с самоорганизацией. Управление с прогнозированием может осуществляться с учетом нечеткости (расплывчатости) множеств целей и условий (ограничений) функционирования системы [43].
1.2. Принцип целеобусловленности
В предыдущем параграфе было показано, что понятие системы появилось как следствие современного этапа НТР. Неудачи при создании за рубежом в послевоенные годы некоторых объектов военного назначения отчетливо показали, что достижение заданных целей может быть обеспечено только определенными комплексами технических средств и обслуживающих их людей, организованными с учетом значительного числа связей друг с другом и внешней средой. Эти комплексы назвали системами.
Как, на основании чего должна формироваться система? Анализ действий, совершаемых людьми или управляемой ими техникой, — независимо от их конкретного содержания — показал, что они могут быть представлены как наборы стандартных задач, реализующих определенные цели. Следовательно, цель является первичной. Именно для ее достижения создаются специальные формирования, именуемые системами. Этот факт и отражает первый принцип системного подхода ((ПСП)), называемый принципом целеобусловленности:
Цель первична. Для ее реализации (достижения) должна формироваться надлежащим образом организованная совокупность технических средств и обслуживающих их людей, т. е. система.Первый, (ПСП), принятый в качестве отправного для разработки i исследования систем, порождает первое следствие: Следствие 1. Данная (исследуемая) система может быть дана, если ей задана цель.
Первый (ПСП) и следствие 1 устанавливают, что конкретная тема не может рассматриваться самостоятельно. Для ее исследо- |ия в целях анализа и синтеза необходимо прежде всего определить see общее формирование, куда она входит как элемент. Практики это означает, что решению любой прикладной задачи предше- (;ует проведение более общих исследований совокупности объектов, юторыми связан данный объект, предполагаемый к рассмотрению К система.
рРбщая (главная, глобальная) цель, поставленная перед системой, рождает множество часФных (локальных) целей, поскольку, как шило, общая цель непосредственно не достижима и необходимо релить ряд подчиненных ей частных целей, достигая которые жно придти и к заданной общей цели. Локальные цели, таким об- Iggi, выступают как средства достижения глобальной цели. Шроцесс формирования множества локальных целей не форма- шдеан. Одной и той же глобальной цели могут отвечать различные Ирества потенциальных локальных целей. Пока не выработана ■шначная программа достижения главной цели, на множестве И|циальных целей действует лишь отношение достаточности, Ш можно утверждать, что некоторое подмножество целей доста- Ярдля достижения данной цели [63]. Фиксация программы позво- SR упорядочить множество локальных целей. В упорядоченном Н&^стве целей Ц действует отношение необходимости, которое ■юетворяет аксиомам порядка: асимметричности, транзитивности ЯВрексивности [63]. Любые две цели X и Y множества Ц упоря- Ню*: цель X младше (предшествует) цели Y, если для достижения Hp необходимо достижение цели X. Такая структура множества * Нш Ц не всегда является «деревом», так как дерево — связный ■Врез циклов, а в множестве Ц достижение цели X может быть ||Нрдимым для достижения нескольких целей. Тем более не яв- ||(В*.деревом неупорядоченное множество локальных целей, воз- ^l^fee при первоначальном анализе средств достижения гло- цели. Исследование этого множества, отсеивание и выбор рфйциальных локальных целей, постепенное сужение круга рассма- ЮЙаемых средств (целей), установление отношения порядка между ручными локальными целями позволяют в конце концов оформи» упорядоченное множество целей, отвечающее вполне опреде- дШой программе достижения главной цели. Процесс упорядочения тожества целей — важнейший этап проектирования системы,*: во ЙР0М определяющий ее структуру и общесистемные характери- Шки.
^Системе может быть задано и несколько "глобальных целей.
случае должен быть также задан принцип компромисса, «пример указанием последовательности достижения целей (сначала рее важных, а затем менее важных). Если принцип компромисса
Ik • 31
у не задается, он может быть выдвинут на уровне проектирования j самой системы, но обязательно должен быть согласован с целепо- > лагающей системой.
ь В процессе функционирования цель системы может меняться. II Соответственно этому должны меняться структура или (и) способ функционирования системы. Цель обусловливает структуру и поведение системы. Это, собственно, и послужило основанием для выбора наименования первого (ПСП). Возможны и другие наименования, например «целепервичность», «целезависимость» и т. п. Представляется, однако, что «целеобусловленность» лучше подчеркивает динамический характер следования структуры и поведения системы ее целям. Особенно это характерно для систем ГАП, определяющей чертой которых является гибкость, т. е. перестраиваемость в про- / цессе функционирования в связи с изменением целей или условий * обстановки. Тем не менее о наименовании первого, да и последующих (ПСП) можно спорить. Необходимо только учесть, что авторы стремились в лаконичной форме отразить существо принципа и обеспечить при этом по возможности его однозначное толкование.
Цель должна задаваться в формализованном виде — в форме спецификатора. Структура спецификатора может быть самой разнообразной в зависимости от конкретной цели.
|
Таблица
1.2
Спецификатор
среднего уровня для задания цели
элементу ГАП, производящему систему
крепежа |
Параметры целеполагания | |||||
|
|
|
Характеристика | ||||
|
|
Наименование |
Размеры, мм |
|
СО |
Л ®
ц
| |
|
№ п/п |
|
тела |
головки |
G3
|
|
|
|
|
|
|
|
|
|
|
|
Таблица
1.1
Спецификатор
верхнего уровня для задания дели
элементу ГАП, производящему систему
крепежа |
Параметры целеполагания | |||
|
Наименование |
Характеристика: число выпускаемых изделий (шт.) | |||
|
Час |
Смена |
Год | ||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
В
табл. 1.2. представлен спецификатор
среднего уровня для задания технологической
цели узлу ГАП, производящему крепежную
систему.В
табл. 1.3 представлен более сложный
спецификатор. Он может быть рекомендован
для задания цели на производство одного
из полуфабрикатов, которые последовательно
преобразуются в программное изделие.Наиболее
развитую форму спецификатора можно
продемонстрировать на примере
задания следующей цели: разработка
технического задания на изготовление
программных изделий широкого назначения
(рис. 1.2). Этот спецификатор имеетНапример,
для узла ГАП, производящего крепежную
систему, спецификатор для самого верхнего
уровня контроля имеет простой вид,
представленный в табл. 1.1. На этом уровне
цель функционирования узла ГАП задается
числом изделий, которое должно
производиться в заданные временные
интервалы.
Вольно
сложную иерархическую структуру. Для
описания правил его разработки Выполнения
необходимо создание специальных
инструкций и автоматизированных
Кнических средств.
В Первый принцип является основополагающим не только для Воцесса исследования и разработки системы. Его применение Ваяется основой и для контроля функционирования созданной синоды. Если система не обеспечивает реализацию заданной цели или ■достаточно полно и своевременно реагирует на ее изменение, ■Г следует считать, что система спроектирована неудачно, она Влжна быть модернизирована или заменена другой. Если отклонение фактического состояния системы от заданного (необходимого) Вблюдается лишь в течение некоторых отрезков времени, то это Вжет служить основанием для вывода о недостаточной оператив- Всти управления системой или невысоком качестве принимаемых Ви этом решений. При изменении цели важно знать, как и в какой Бок на него реагирует система, какова инерционность или гибкость Встемы. Только при возможности выполнения всех этих важных Вякний первый принцип можно считать конструктивным. Отсюда ■рдует необходимость соблюдения двух условий: Вш цель должна быть сформулирована таким образом, чтобы Вможно было оценить (задать) количественно; Вг$) в системе должен быть механизм, позволяющий оценить сте- Вр> достижения заданной цели. ВР||з этих условий вытекает второе следствие: В№ледствие 2. Данная (исследуемая) система может суще- Шммать, если она содержит механизм достижения цели, количе- щЬвенно характеризующий в каждый момент времени степень соот- ^ШШтвия поведения системы заданной цели.
Ш^ля функционирования механизма достижения цели необхо- Ipil определенный набор постоянно обновляемых количественных и алгоритм их обработки для вычисления оценок качества у1^щления. Качество управления w будем отождествлять здесь ФДбдощим в формулировку следствия 2 понятием степени соответ- доведения системы заданной цели.
4 мМробнее вопросы формирования функций контроля за поведе- :ййём;;Щ|стемы — функций качества управления w — рассмотрены Щ гл. Здесь укажем лишь, что функция w зависит от значений ^арцмэдюв (функций) целеполагания /Сг(0> формализующих заданные едс^еме цели, и параметров Хг(0, характеризующих фактическое состояние системы:
w = w({Kr(t)}, {Хг (0». (1.1)
В простейшем случае однопараметрического управления это может быть выражение вида
w (t) = X (t)/K (t) (1.2)
или подобное ему (см. п. 6.2).
Таким
образом, необходимость оценки качества
управления, т. е. реализации уравнений
(1.1) или (1.2), требует формализованного
ДР.33
С«3
ov
|
Часть полуфабриката |
Совокупность элементов полуфабриката |
Элемент полуфабриката |
Исполнение | ||
|
Этап |
• Форма |
Действие | |||
|
|
— |
|
|
|
|
|
|
— |
|
|
|
|
|
|
— |
|
|
|
|
|
V. |
|
|
|
|
|
|
|
|
|
|
J | |
Спецификатор
документирования на производство
полуфабриката программного продукта
Таблица
1.3 i
|
h | |
|
|
| |||
|
|
|
|
|
|
| |
|
|
|
|
|
|
- | |
|
|
|
|
|
|
| |
|
|
|
|
|
|
| |
|
|
|
|
|
|
| |
|
|
|
Продолжение ~ |
табл. 1.3 | |||
|
Часть полуфабриката |
Совокупность элементов полуфабриката |
Элемент полуфабриката |
|
Исполнение | | ||
|
|
|
Этап |
Форма |
Действие | ||
|
1 |
5.1. Графически-словесная схема реализуемого процес. са:
^ 5.1 А. Взаимодействие техяическях1п1про?рш~х * мных средств |
c
k 5.1.3.8. Обобщенный|вариант графически-словес- ной схемы процесса
|
й |
|
ЯШ | |
|
|
5.2. Графически-словесная схема связи с другимн^про- цессами:
|
|
|
|
| |
|
|
|
|
|
|
| |
|
|
|
|
|
|
| |
|
|
|
|
|
|
| |
|
|
|
|
|
|
| |
|
Продолжение
табл. | ||||||
|
Часть полуфабриката |
Совокупность элементов |
Элемент полуфабриката |
Исполнение { | |||
|
полуфабриката |
Этап |
Форма |
Действие | |||
|
|
|
|
|
|
| |
|
|
— |
|
|
|
| |
|
|
— |
|
|
|
| |
|
|
— |
|
|
|
| |
|
|
— |
|
|
|
| |
|
|
— |
|
|
|
| |
рани я дели в виде совокупности количественных значений пара- шов целеполагания {/(r (^)}.* Это требование подчеркивает третье рствие:
Вследствие 3. Параметры, определяющие цель, должны быть щчественно измеримы.
Шариант
функции
w
(t)
для
узла ГАП, производящего крепежную
систему, ртавлен на рис. 1.3. На нижнем
уровне контроля реализации заданной
цели £шом примере — это контроль по
отдельности за планами выпуска комплектую-
^изделий, т. е. болтов, гаек и шайб) функцию
качества можно определять по выгнию
(1.2). Здесь
К (t)
фиксирует
план выпуска соответствующего комплектую-
I
изделия, а
X (t)
—
число фактически выпускаемых изделий.
Анализ функции контроля выпуска шайб
показывает, что этот участок ГАП рает
стабильно/ В интервале времени
[tlt
t2]
участок
был настроен на заданное шие в строгом,
соответствии с планом. Нормативный
запас в интервале вре- I 1*2»
t3]
также
выдерживается строго в соответствии с
установленным планом, риозируемое
поведение элемента ГАП в течение всего
срока выпуска заданной «и изделий
[t3l
/6]
обещает быть стабильным и соответствует
плану. За работу ^ участка старшая
система, поставившая ему цель
функционирования, может I спокойной.
06
участке ГАП, выпускающем гайку, этого
сказать нельзя. Хотя участок был юочно
налажен (ранее момента времени
t2)
и
введен в строй, работа его протекает
Ьгервале времени [t2,
/3]) и будет протекать (в интервале
[t3,
нестабильно,
Б
.и
в пределах заданных нормативных
отклонений.
ВГчасток
ГАП, выпускающий болт, введен в строй в
срок, но делалось это неплано- юо (время
t2
])•
Участок работает нестабильно и допускает
невыполнение плана Вря *.])• Прогноз его
работы в интервале времени также
неутешителен,
ijia
верхнем
уровне осуществляется контроль за
выпуском комплексного изде- крепежной
системы. В этом случае функция качества
w
оценивается
по об- fcy
выражению
(1.1) (см. п. 6.3). График показывает, что до
момента
t3
в
целом шлексный узел ГАП работает
нормально. Однако прогноз дальнейшей
работы рует вмешательства человека
(настройщиков) в процесс протекания
безлюд- Щ (автоматического) производства.
С момента
t4
комплексный
участок не будет Шлйять план. Величина
А/ = /4
—
t3
показывает,
в течение какого отрезка вре- Щ оператор
ГАП должен принять необходимые меры.
Вызвав на контрольный Spa
дисплея
функции качества
w
нижнего
уровня, по характеру кривых он наглядно
щ&т определить, какой из элементов
ГАП требует участия (помощи) человека.
^Характеру контрольных функций можно
получать и дополнительную информа- ЙЬ»
Например, если неисправность элемента
ГАП не будет устранена к моменту ^
ЖШплексный участок перестанет выполнять
план.
р^спользуя метод организации контроля с помощью функций можно получить практически всю необходимую информацию организации управления ГАП. Более подробно это исследовано ||| Последующих главах.
![]()
•^Рассмотренные примеры убедительно показывают объективность Рргсутствия следствия 3 в системе операционных правил системного Мдхода. Действительно, если цель сформулирована качественно (ЙШ!ример, «выпустить изделие как можно быстрее»), проверить ее Шйолнение невозможно. В этом случае орган управления ГАП Дшакен, взвесив потенциальные возможности участка, определить решения соответствующей оптимизационной задачи минимально возможный при наличных ресурсах срок выпуска изделия « предложить его на утверждение старшей системе. Возможно также определение параметрической зависимости срока выпуска от объема Дополнительных ресурсов, которые может выделить старшая система, ^гот процесс длится до тех пор, пока старшая система, сопоставив
Рис.
1.3. Функция контроля работы элемента
ГАП: а — верхний уровень контроля; б —
нижний уровень контроля;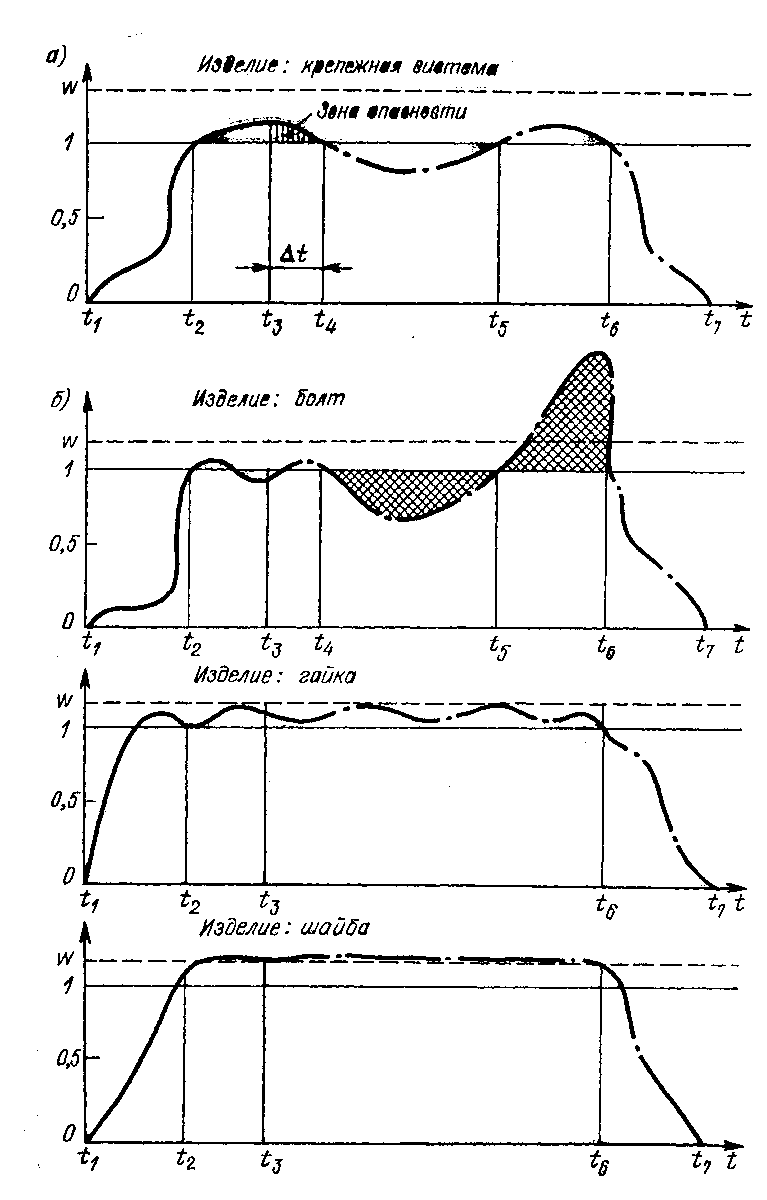
— фактический выпуск? —
—
прогноз
производства;
J. Принцип относительности
Принципы системного подхода сами по себе также должны об- эвывать систему. Они взаимосвязаны и взаимообусловлены и, Соответствии с первым (ПСП), должны реализовывать некоторую 1ь, Такой целью является полнота набора операционных правил разработки системы. Характеристикой полноты может служить Ьпень охвата в (ПСП) следующих основных аспектов свойств, педования и разработки систем (см. п. 1.1): целесообразности; |уктуры; поведения; оптимизации — в локальном (в отдельных ервалах времени) и глобальном (на протяжении всего жизненно цикла системы) смыслах; роли и места человека в системе. ^Аспект целесообразности (система целесообразна постольку, по- Зльку достигаются поставленные перед ней цели) описывается рвым (ПСП) и следствиями 1—3 из него. Особенно велика роль ёдствия 2, требующего включения в систему постоянно действу- даго механизма контроля за выполнением поставленных целей. Усмотрение аспекта структуры системы требует прежде всего учета гительности обоих понятий: как системы, так и ее структуры. Действительно, каждая система является частью другой, более 6®щей системы, входя туда в качестве одного из элементов. В свою очередь, каждый элемент системы обладает собственной структурой " также может рассматриваться как система. Иерархическая струк- fpa мира делает относительной классификацию объектов на си- и элементы. Членение системы на подсистемы, компоненты и Элементы, т. е. выявление ее структуры, также не является одно- *3йачным, поскольку при этом возможна различная степень детализации или обобщения. Оба обстоятельства делают понятным второй ЩСП), называемый принципом относительности:
: Одна и та же совокупность элементов может рассматриваться как самостоятельная система и как часть (подсистема) другой, большей системы, в которую °на входит. В свою очередь, эта же совокупность элементов может рассматриваться как большая система по ошению к частям (подсистемам), которые входят в
Значение второго (ПСП) не ограничивается негативной кон- татацией относительности понятий системы и ее структуры, Напро- Ив> из него прежде всего вытекает тот важный факт, что ни одна
43
Система не может рассматриваться изолированно, Поскольку от является элементом большей системы. В частности, проясняется механизм целеполагания. Цель — категория внешняя по отношению I к системе. Она ставится ей системой более высокого уровня, куда данная система входит как элемент. Целеполагание для нее, в свою очередь, осуществляется еще более высокой системой и т. д., вплоть до системы определенного (различного для разных предметных областей) уровня, цели которой вытекают из некоторой совокупности ценностей, т. е. до уровня ценностно-ориентированной системы [63]. Таким образом, второй (ПСП) порождает следствие, устанавливающее порядок задания цели системе:
Следствие 4. Для данной (исследуемой) системы {(ИС)) цель задает большая по отношению к ней система.
Во втором (ПСП), по существу, содержится утверждение об иерархичности систем, их «вложенности» друг в друга. При повышении уровня рассмотрения отдельные системы трансформируются в элементы. При анализе того или иного элемента вскрывается структура и обнаруживаются его свойства как целостной системы. Выделение какого-либо из элементов, его самостоятельный анализ обязательно сопровождается установлением его связей с другими элементами данной и других систем. Собственно, указание полного перечня элементов, а также совокупности их связей между собой и внешней средой и фиксирует структуру системы. В силу второго (ПСП) это — иерархия.
Напомним, что иерархической является многоуровневая (многоступенчатая) структура системы, компоненты которой упорядочены по уровням координации и субординации. Функции управления в такой системе распределены между соподчиненными уровнями [531. Иерархическую структуру обычно противопоставляют радиальной (веерной), характерной для централизованного управления (см. гл. 2). Противопоставление это, конечно, условно: радиальную структуру можно считать частным случаем иерархической двухуровневой системы с одним элементом верхнего уровня, осуществляющим управление функционированием нескольких элементов нижнего уровня. Таким образом, иерархичность структуры можно считать характеристикой, органически присущей сложным системам. Собственно, лишь иерархическая упорядоченность сложных систем делает реальной задачу их проектирования и исследования. Поэтому этап выявления иерархической структуры системы, ее анализа или синтеза является важнейшим после установления и упорядочения множества целей системы. Необходимость такого этапа подчеркивает следующее следствие:
Следствие 5. Система должна представляться в иерархической форме.
Различают иерархии с сильными и слабыми связями. Нас будут интересовать только сильные иерархии (типа «дерева»), в которых один или несколько компонентов нижележащего уровня подчиняются лишь одному из компонентов вышележащего уровня. Более сложные связи типа ромбических структур рассмотрены в работе [151.Ю Отметим также, что иерархическое представление, являясь, Ш- существу, адекватным Структуре сложной системы, облегчает К Графическое изображение системы* что отнюдь не безразлично
точки зрения концепций САПР и им подобных.
|т; Иерархия предусматривает представление описания, в котором ирлжны быть выделены старшие и младшие части системы, порядок ■Ьдчиненности и£перехода£от низших|уровней|к|высшим. Кроме Его, она упорядочивает процесс изучения (разработки) Системы, Шгда осуществляется последовательная детализация процесса мето- |ом сверху — вниз или объединение отдельных его компонентов Щболее общие формирования методом снизу — вверх. В том и другом случаях'очень важно классифицировать связи подчиненности, Б.е. установить, какая система (элемент) какой подсистеме задает Кль и как осуществляется контроль степени ее выполнения. При Вкой классификации выявляются связи (влияния) относительно Шэростепенные, которыми можно пренебречь, и в соответствии с прин- Вшами рекуррентного объяснения и «минимаксного построения мо- Клей» (см. п. 1.1) минимизируется сложность построения системы, кто же время выявляются узлы, которые оказывают на процесс Врсное влияние (например, работоспособность элемента энерго- Ирбжения производства крепежной системы предопределяет, будет Ера вообще выдавать продукцию или нет).
Таким образом, иерархическое упорядочение структуры системы ■нособствует установлению таких качественных категорий, как ■важность» и «приоритет». Без учета этих категорий невозможно ■Кр&низовать поточное гибкое автоматизированное производство, iu Врержащее в своей основе организдхщю^обслуживания очередей. Щ
Ipt
Конструктивность
второго (ПСП) и его следствий можно
достаточно наглядно ■йрледить на уже
рассмотренном примере организации ГАП
крепежной системы. ВЙрответствии с
самим принципом каждый из элементов,
производящих болты, и шайбы, может
рассматриваться как самостоятельная
система, имеющая ЩМ внутреннюю структуру.
Эти структуры можно представить с
различной степе- ||£к
детализации. Например, можно выделить
следующие узлы: механическую часть-
М^^сального станка, осуществляющую
операцию обработки детали; управляю-
йую ?йсть в виде микропроцессора с
заданной программой адресации; транспорт-
тележку для подачи заготовок и отбора
готовых деталей. Детализацию каждого
Ж узлов можно продолжить и дальше.
й:у
Втожевремя каждый из элементов,
производящих болт, галку, шайбу, является
Ш^ю другого, старшего элемента,
комплектующего крепежную систему. Этот
старшей;
элемент ГАП, как требует следствие 4,
устанавливает
для
прль
функционирования,
т. е. задает режим их работы f/fr
(t)}
в
соответствии
гг>
^пртщф^кятррями
ш*. табл. i.i
и
i.2).
Значения
параметров {Кг
(/)} используются старшей системой
контроля за качеством выполнения младшей
системой заданной цели функционирования.
В графическом виде элементы ГАП в соответствии со следствием 5 $рлжны быть представлены как иерархические структуры.Ш
2
Если рассматриваемой (исследуемой)
системой являются элементы, производящие
болты, гайки и шайбы, то они имеют
структуру, представленную на рис. 1.4.
rjI4
в
качестве рассматриваемого элемента
принять комплектующую крепежную ему,
приходим к другой структуре (рис. 1.5). В
этом случае приходится выйти гймки
элементиа
ГАП крепежнрй системы и рассматривать
его, в свою очередь, ■ к
ч^сть
другой, старшей в иерархическом отношении
системы (например, системы, производящей
корпуса для какого-то изделия и
использующей длй их сборки крепеж с
помощью болта и гайки).
Обычно старшая система (СС) располагается при графическом изображении выше младшей системы (МС). В зависимости от степени подробности изображения структуры каждая из рассматриваемых систем может быть представлена в обобщенном (вариант А) или детализированном (вариант Б) виде (см. рис. 1.4, 1.5).
Рис.
1.4. Иерархическая структура элемента
ГАП, предназначенного для производства
болта: а — вариант А (обобщенный); б
— вариант Б (детализированный)
Рис.
1.5. Иерархическая структура элемента
ГАП, предназначенного для производства
крепежной системы: а — вариант А
(обобщенный); б — вариант Б (детализированный)
На этих примерах принцип иерархии прослежен как при продвижении вне изучаемой системы, так и при углублении, переходе на все более низкие уровни компонентов внутри системы. Конструктивно принцип направлен на анализ и формирование структуры системы, ее членение на компоненты, выявление их функций и свойств, в том
"еле интегративных. Членение системы на подсистемы и элементы тносится с множеством дел ей. Из рассмотренного простейшего имера это очевидно. В более сложных случаях полного соответ- ия, возможно, получить не удастся, но связь их будет проступать евидно. Отдельные компоненты могут участвовать в процессе -тижения нескольких локальных целей. Другие могут обеспечить этот процесс и выполнять, таким образом, функции, не содер- иеся в перечне локальных целей системы (как, например, в си- е энергоснабжения всех рассмотренных элементов ГАП про- водства крепежной системы). Таким образом, можно сказать, что ножество целей системы порождает ее структуру, функции и свой- ва компонентов и системы в целом. Принцип иерархии ориенти- ~ет при эТом на последовательное продвижение сверху — вниз утри системы и снизу — вверх вне ее.
f
I/
-