

1.12. Структура модуля единичного "ра управления ((еку)): а- — ва- т 1; б — вариант 2
г ному принципу: модули программного обеспечения должны ь п о о^д ному коллективному входу и вы- :Д- У-
(1.3)
(1 — Дш) < w < (1 + Aw),
исследуемая система функционирует с учетом влияния всех взаи- действующих с ней подсистем и при этом выполняется основное
требование управления: поведение системы соответствует задаче управления. Это требование выражается девятым следствием:
Следствие 9. Управляемая система должна иметь внешние критерии на входе и выходе, характеризующие степень соответствия ее поведения задаче управления. Критерии на входе задает старшая в иерархическом отношении система; критерии на выходе формирует сама данная {исследуемая) система.
Внешние критерии щ и wlz количественно характеризуют степень связанности исследуемой системы с остальными системами, взаимодействующими с ней в процессе функционирования. Значение внешнего критерия wl на входе свидетельствует, как (ИС) выполняет поставленную ей старшей системой задачу управления; значение wn — как она сама осуществляет управление иерархически подчиненными системами, обеспечивающими производство со компонентов, из которых (ИС) формирует заданный ей старшей системой объект (изделие). Указанный подход позволяет в первом приближении практически решить пооблему формирования цели управления большой системой, о чем шла речь в начале данного параграфа, не требуя при этом рассмотрения сверхвысоких иерархических уровней. Системе, исследуемой в рамках (ЕКУ), цель функционирования с точностью до практических реализаций определяет объединенная старшая в иерархическом отношении система.
Ограничения функционирования (ИС) по входу и выходу заданными пределами изменения внешних критериев можно трактовать как осознанную необходимость, в рамках которой она может проявить свободу своего поведения. Для этого (ИС) вырабатывает такой стиль поведения, при котором значения внешних критериев удовлетворяют условиям (1.3) при наименьших затратах усилий. Оптимизация внутренних усилий поведения (ИС) осуществляется с использованием системы внутренних критериев. Это требование определяет десятое следствие:
Следствие 10. Исследуемая система свободна в выборе совокупности внутренних критериев, предназначенных для оптимизации распределения ее ресурсов в целях максимального (<оптимального) удовлетворения внешним критериям.
Простейшей формой реализации следствия 10 является оптимизация внутренних критериев подсистем ГАП при выполнении заданных ограничений на значения внешних критериев. Более полной и прогрессивной является реализация следствия 10 путем формирования так называемых встречных планов, когда подсистемы ГАП при выполнении внутренней оптимизации могут выдвигать предложения по улучшению значений внешних критериев, например путем сужения диапазона их возможных значений или сдвига границ диапазона в нужном направлении. Естественно, это требует решения более сложных в математическом отношении задач.
В отличие от внешних критериев, которые имеют типовой вид [см., например, уравнение (1.2)], внутренние критерии могут быть самой разнообразной формы в зависимости от специфики системы, особенностей требований к ее функционированию и т.п. Следует, |рочем, оговориться, что «типичность» внешнего критерия w также —ляется условной. В основе его лежит множество параметров целе- • лагания, которые, так же как и внутренние критерии, характери- *жют различные стороны исследуемой системы. Это и не случайно, системе, как правило, предъявляется спектр требований, по- •ольку за редкими исключениями она является многоцелевой и , :*аршая система устанавливает желаемые (необходимые) количест- .: нные уровни по каждой из целей (в соответствии со следствием 3 г*ль должна быть измеримой). Однако столь же Очевидно, что для ьн^инятия решения, выбора одного из дльтернативных вариантов ^.ижения системы необходим один критерий. Поддавшись гипнозу юго, конечно же сильного утверждения, некоторые авторы [51] читают, что вообще может быть только один критерий, остальные ^ляются показателями, как будто замена одного термина другим ^жет изменить существо задачи, или что наличие нескольких целей ™идетельствует не о многоцелевом характере системы, а о неумении ^следователя сформулировать задачу [22] и т.п. Нам представляется, что задача проектирования и оптимизации большой системы ;: подавляющем большинстве случаев является многокритериальной — постольку, поскольку сама система является многоцелевой, [^ответственно и проблема контроля эффективности ее функционирования является многопараметрической, качественно эквивалент- й многокритериальной оптимизации. Другое дело, что практиче- ~ое решение многокритериальной задачи требует задания того или jfioro компромисса, который фактически сводит проблему к одно- критериальной (использование всевозможных сверток многих кри- \~риев, задание границ для значений всех критериев, кроме одного, т. п.) или к совокупности последовательно решаемых однокрите- ^иальных задач (метод уступок).< Как показано в гл. 6, внешний критерий w также представляет .бой своеобразную свертку нескольких параметров. Выбором инципа компромисса распоряжается исследователь. И задача, нашей точки зрения, состоит не в том, чтобы безуспешно искать ный», «глобальный» критерий для многоцелевой системы, а в по- янном расширении перечня принципов компромисса, исследо- Шш и установлении для каждого из них диапазона условий при- Нения, разработке для этой цели адекватного математического ^арата, предоставлении в распоряжение проектировщиков систем г^ветствующего алгоритмического и программного обеспечения, ^лючении его в виде программных или технических средств в состав ^йствуклцих системен т. п. *\*"\Для нас существенным в следствиях 9 и 10 является не спорная Л&аможность охарактеризования поведения системы одним критерием, а бесспорное наличие у системы внешних и внутренних крите- ,ДИ*ев, множественность тех и других, относительная свобода в вы- у&ре внутренних критериев и безусловная реальность решения задач внешнего контроля и внутренней оптимизации благодаря успехам ® исследовании многокритериальной проблемы. В то же время следует уже теперь, по опыту практических исследований, подчеркнуть важность^принципа компромисса, основанного на иерархическом упорядочении системы критериев и последовательном ро времени их анализе, а затем и оптимизации. Особенно это существенно при организации контроля функционирования систем ГАП. При выполнении ограничений вида (1.3) на значения внешнего критерия w ГАП продолжает функционировать по принятому плану. Если ш выходит за установленные пределы, руководитель анализирует по отдельности каждый из параметров целеполагания, входящих в wt устанавливает, по какому из них не выполняется план, спускается
Рис.
1.13. Структура (ЕКУ) ГАП программного
продукта:
а —
(ЕКУ) цеха разработки; б — (ЕКУ)
элемента производства болта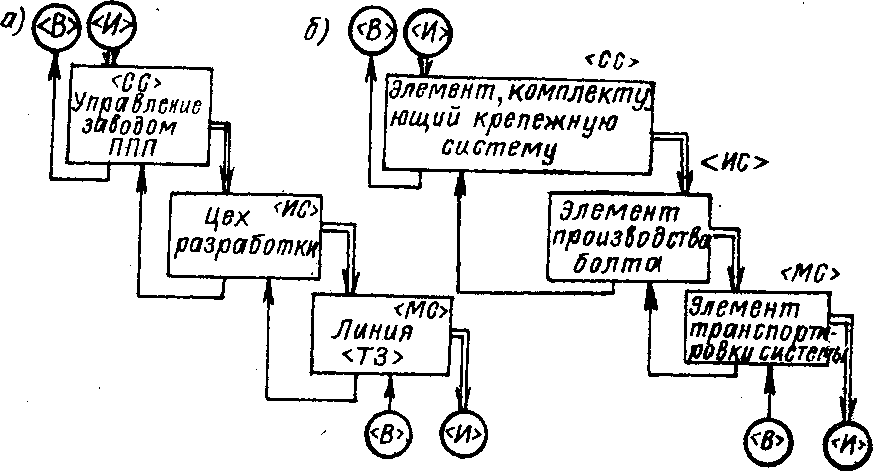
при необходимости на более низкие уровни иерархии системы и» установив окончательные причины срыва, принимает меры по устра* нению рассогласования с планом.
Выделение (ЕКУ) позволяет конкретизировать процесс исследования и проектирования системы, расчленить его на строго упорядоченную конечную последовательность операций.
Если,
например, проектируется элемент ГАП
цеха разработки завода ППП (см. рис.
1.10), то необходимо последовательно
построить и «обработать» четыре (ЕКУ)
(рис. 1.13, а), в которых объединенная (МС)
включает четыре подсистемы: линии (ТЗ),
(ЭП), <ТП) и (РП).
Для
элемента ГАП, выполняющего операцию
производства болта (см. рис. 1.8), в (ЕКУ)
необходимо включить систему нижнего
иерархического уровня, предназначенную
для подачи необходимых заготовок
(полуфабрикатов). Внешним критерием
(ИС) на выходе будет степень удовлетворения
требованиям, заданным ПИД (первые строки
табл. 1.1 и 1.2). Для внешнего критерия на
входе параметры целеполагания для
элемента транспортной системы определяются
той же строкой ПИД (см. табл. 1.1 и 1.2).
Различаются лишь характеристики размеров
заготовки, учитывающие припуск на
обработку.
Структура
этого простейшего элемента ГАП может
быть достаточно сложной. Практически
она может включать все элементы,
представленные на типовой схеме (ЕКУ)
(см. рис. 1.11). В объединенную (СС) могут
входить элементы, комплектую- 1зличные
по структуре, размерам и назначению
крепежные системы. 6 зависнет общего
числа различных по .номенклатуре болтов,
входящих составным гом в крепежную
систему, сама (ИС) может представляться
или различными т, каждый из которых
настроен на один единственный вид
изделия, или ^ сальным станком,
обеспечивающим производство болтов
определенной но- йатуры в пределах
заданных технических ограничений
возможностей станка Й*нимуму и максимуму
параметрических характеристик). В
последнем случае йяее полно будут
проявляться принципы гибкости
перенастройки производства рыпуска
различных наименований изделия, а сама
перенастройка может осуществ- я сменой
пакета программного обеспечения.
Синхронно должна будет меняться грамма
управления транспортной системой. В
пределах ограничений, заданных ними
критериями, система, производящая
непосредственно болт, может оптими-
|ать характер своего поведения, используя
внутренние критерии так, чтобы арные
расходы ресурсов были минимальны.
Параметрами для выполнения та- эптимизации
могут быть: показатель расхода
электроэнергии; число операций
та-манипулятора при смене детали, ее
креплении и обработке; скорости режи-
5работки; частота смены инструментов;
график профилактических работ и т. д.