

13.4 Критерии оптимальности процесса поиска неисправностей
Алгоритмы проверок объектов диагностирования, обеспечивающие отыскание неисправного элемента, могут быть составлены самым различным образом, и, естественно, они будут характеризоваться различной эффективностью. Задача заключается, в том, чтобы из имеющегося множества алгоритмов выбрать наилучший по тому или иному критерию.
Так
как от времени поиска неисправностей
в большой степени зависит время
восстановления готовности вооружения
к применению и это время случайно,
то естественным критерием выбора
алгоритма
проверок (критерия оптимальности)
является среднее время поиска неисправности
![]() .
Оптимальным считается такой алгоритм
проверок, который обеспечивает минимальное
среднее время поиска неисправности.
Данный критерий оптимальности в основном
применяется при составлении оптимальных
алгоритмов поиска неисправностей в
вооружении, находящемся в режиме
готовности к применению.
.
Оптимальным считается такой алгоритм
проверок, который обеспечивает минимальное
среднее время поиска неисправности.
Данный критерий оптимальности в основном
применяется при составлении оптимальных
алгоритмов поиска неисправностей в
вооружении, находящемся в режиме
готовности к применению.
В
тех случаях, когда момент начала
применения объекта
![]() известен, а неисправность обнаружена
в момент
известен, а неисправность обнаружена
в момент
![]() использование
алгоритма проверок по минимуму среднего
времени поиска неисправности может
оказаться невозможным из-за того,
что
использование
алгоритма проверок по минимуму среднего
времени поиска неисправности может
оказаться невозможным из-за того,
что
![]() .
.
В такой ситуации в качестве критерия оптимальности целесообразно выбрать вероятность обнаружения неисправности за заданное время. В этом случае оптимальным будет являться алгоритм поиска неисправности, обеспечивающий максимальное значение вероятности обнаружения неисправности за заданное время.
Кроме этих критериев иногда для выбора оптимального алгоритма проверок используют среднее число проверок, потребное для отыскания неисправности, стоимость реализации диагностического процесса, максимальное время поиска неисправности, среднюю скорость получения информации и др.
В некоторых частных случаях оптимизация алгоритмов поиска неисправности по отдельным из этих критериев обеспечивает получение алгоритмов с минимальным средним временем поиска неисправности. Известен[17] так называемый принцип максимальной средней скорости получения информации (принцип МСПИ), обеспечивающий в ряде случаев минимальное среднее время поиска неисправности. Рассмотрим сущность принципа МСПИ и правила его применения для построения оптимального алгоритма проверок.
Под средней скоростью получения информации на том или ином этапе испытаний понимают отношение
где
![]() -
средняя скорость получения информации
наj–м
этапе испытания;
-
средняя скорость получения информации
наj–м
этапе испытания;
Алгоритм поиска дефектов
Алгоритмы поиска дефектов могут быть трех видов: последовательные, параллельные и комбинированные.
При последовательном поиске каждая проверка выделяет в пространстве поиска один дефект. Удовлетворить это условие можно для ОД, представленного в виде последовательной схемы соединения структурных единиц (СЕ), когда известно, что на вход подастся штатный сигнал, а по выходному сигналу можно определить наличие в ОД дефекта двумя путями: от начала к концу и от конца к началу. Иллюстрация данного алгоритма поиска дефекта на примере ОД, состоящего из четырех СЕ приведена на рис. 6.8,а.
В
первом случае необходимо выполнить
проверку
![]() в точкеA
поскольку она позволит исключить из
рассмотрения сразу один элемент СЕ
1. Если сигнал в допустимых пределах, то
следующую проверку
в точкеA
поскольку она позволит исключить из
рассмотрения сразу один элемент СЕ
1. Если сигнал в допустимых пределах, то
следующую проверку
![]() следует выполнить в точкеB,
которая позволит определить состояние
СЕ2. Если результат проверки отрицательный,
то дефект в данном элементе. Если
положительный, то необходимо выполнить
проверку
следует выполнить в точкеB,
которая позволит определить состояние
СЕ2. Если результат проверки отрицательный,
то дефект в данном элементе. Если
положительный, то необходимо выполнить
проверку
![]() в точке C.
Если результат проверки положительный,
то дефект — в СЕ4, в противном случае —
дефект в СЕЗ. Алгоритм поиска представлен
на рис. 6.8,б.
в точке C.
Если результат проверки положительный,
то дефект — в СЕ4, в противном случае —
дефект в СЕЗ. Алгоритм поиска представлен
на рис. 6.8,б.
Во
втором случае (от конца к началу), если
результат проверки
![]() в точке С положительный, то следующую
проверку
в точке С положительный, то следующую
проверку![]() необходим выполнить в точке В. При
положительном результате дефект СЕЗ,
при отрицательном выполняется проверка
необходим выполнить в точке В. При
положительном результате дефект СЕЗ,
при отрицательном выполняется проверка![]() .
По результатам этой проверки отыскивается
дефект либо в СЕ1, либо в СЕ2.
.
По результатам этой проверки отыскивается
дефект либо в СЕ1, либо в СЕ2.
При параллельном поиске ОД разбивается каждой проверкой на равные или почти равные части, если соответственно в ОД четное или нечетное число ОД.
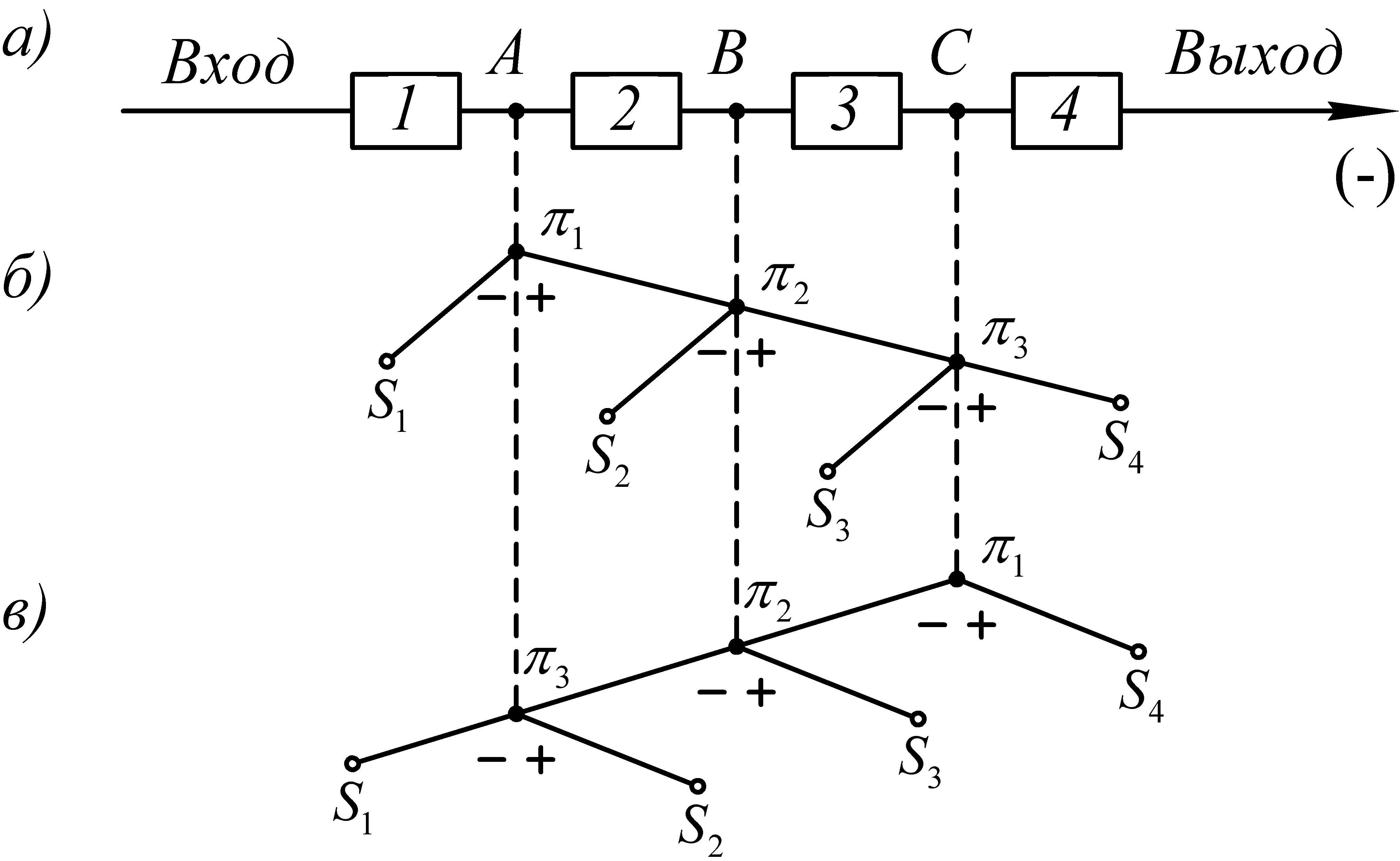
Рис. 13.10. Алгоритм поиска дефектов
Так,
для ОД из четырех СЕ (рис. 13.11,а)
при реализации параллельно поиска
первая проверка
![]() ,
выполняется в точке В. Если результат
отрицательный, то следующая проверка
,
выполняется в точке В. Если результат
отрицательный, то следующая проверка
![]() выполняется в точкеA,
в результате чего определяется место
нахождения дефекта (СЕ1 или СЕ2). В
противном случае назначается проверкая3
в точке С, позволяющая определить
выполняется в точкеA,
в результате чего определяется место
нахождения дефекта (СЕ1 или СЕ2). В
противном случае назначается проверкая3
в точке С, позволяющая определить

Рис. 13.11. Алгоритм поиска дефектов
дефект в СЕЗ или СЕ4. Алгоритм приведен на рис. 13.12.
Число проверок N, необходимых для нахождения всех дефектов рез число СЕ, можем определить по формуле
![]() —целая
часть.
—целая
часть.
При n = 4 требуется две проверки, при n = 8 — три проверки. При комбинированном поиске имеет место сочетание последовательного и параллельного алгоритмов. По алгоритму поиска дефекта в виде дерева можно определить
суммарную длину ветвей достижения искомого дефекта
где
![]() — длина i-й
ветви, р
— число ветвей от начала поиска до
искомого дефекта. Например, для графа,
представленного на рис. 13.12, б,
— длина i-й
ветви, р
— число ветвей от начала поиска до
искомого дефекта. Например, для графа,
представленного на рис. 13.12, б,
Если
в качестве
![]() рассматривать время
рассматривать время![]() ,
то, воспользовавшись формулой дляLi,
можно определить время, затрачиваемое
на поиск
i-го
дефекта.
,
то, воспользовавшись формулой дляLi,
можно определить время, затрачиваемое
на поиск
i-го
дефекта.
Алгоритмы поиска дефектов могут быть построены на основе анализа структуры объекта или использования показателей, характеризующих надежность СЕ.