

4. Критерии качества и правила принятия решений
Из-за
действия шума возможны ошибки в принятии
решений. Выборка
![]() может принадлежать подмножеству
может принадлежать подмножеству![]() и примется решение о том, что источник
находится в состоянии
и примется решение о том, что источник
находится в состоянии![]() ,
хотя источник находился в состоянии
,
хотя источник находился в состоянии![]() .
Последствия ошибок могут быть различны.
В частности, можно построитьматрицу
потерь,
платежную матрицу (как меру потерь)
.
Последствия ошибок могут быть различны.
В частности, можно построитьматрицу
потерь,
платежную матрицу (как меру потерь) ![]() при принятии гипотезы
при принятии гипотезы
![]() ,
в то время как источник был в состоянии
,
в то время как источник был в состоянии![]() ,
,
![]() .
.
При неоднократном применении процедуры проверки гипотез с данным правилом можно вычислить математическое ожидание потерь
 ,
(4.1)
,
(4.1)
где
![]() - условная вероятность попадания выборки
- условная вероятность попадания выборки
![]() в область
в область![]() при состоянии источника
при состоянии источника![]() .
Величину
.
Величину![]() называютусловным
риском
для гипотезы
называютусловным
риском
для гипотезы
![]() .
Если задано распределение состояний
источника
.
Если задано распределение состояний
источника![]() ,
то полные потери (риск) при заданном
правиле
,
то полные потери (риск) при заданном
правиле![]() принятии решений будут иметь вид:
принятии решений будут иметь вид:
 (4.2)
(4.2)
Функция
![]() называетсясредней
функцией риска.
Способ разбиения выборочного пространства
называетсясредней
функцией риска.
Способ разбиения выборочного пространства
![]() на подпространства
на подпространства![]() ,
так чтобы функция риска
,
так чтобы функция риска![]() приняло минимальное значение,
приняло минимальное значение,![]() ,
называетсякритерием
Байеса.
Правило принятия решений, которое
обеспечивает минимальное значение
риска
,
называетсякритерием
Байеса.
Правило принятия решений, которое
обеспечивает минимальное значение
риска
![]() ,
будем называтьоптимальным
по Байесу.
Это минимальное значение средней функции
риска
,
будем называтьоптимальным
по Байесу.
Это минимальное значение средней функции
риска
![]() называетсяриском
по Байесу,
а правило принятия решений в этом случае
называется байесовским
правилом принятия решений.
называетсяриском
по Байесу,
а правило принятия решений в этом случае
называется байесовским
правилом принятия решений.
4.1. Проверка двухальтернативных гипотез
Рассмотрим
критерии и правила проверки
двухальтернативной гипотезы. Положим,
источник имеет два состояния
![]() и
и![]() .
Потребителю неизвестно, в каком состоянии
находится источник. Выдвигаются две
гипотезы:
.
Потребителю неизвестно, в каком состоянии
находится источник. Выдвигаются две
гипотезы:
![]() :
источник находится в состоянии
:
источник находится в состоянии
![]() ,
т.е. генерирует сигнал
,
т.е. генерирует сигнал![]() ,
,
![]() :
источник находится в состоянии
:
источник находится в состоянии
![]() ,
т.е. генерирует сигнал
,
т.е. генерирует сигнал![]() .
.
На
основании выборки
![]() потребитель должен вынести решение
потребитель должен вынести решение![]() или
или![]() о состоянии источника информации.
о состоянии источника информации.
Разобьём
множество
![]() на два подмножества
на два подмножества![]() и
и![]() .
Если после проведения
.
Если после проведения![]() измерений выборка
измерений выборка![]() ,
принимаем решение
,
принимаем решение![]() о том, что
источник
находится в состоянии
о том, что
источник
находится в состоянии
![]() ,
а если
,
а если![]() принимаем решение
принимаем решение![]() о том, что источник находится в состоянии
о том, что источник находится в состоянии![]() .
.
При проверке
двухальтернативных гипотез принято
классифицировать вероятности ошибок
![]() в зависимости от проверяемых гипотез.
в зависимости от проверяемых гипотез.
![]() —вероятность
ошибки первого рода.
В радиолокации она называется вероятностью
ложной тревоги. В теории проверки
статистических гипотез вероятность
ошибки первого рода называется значимостью
критерия.
—вероятность
ошибки первого рода.
В радиолокации она называется вероятностью
ложной тревоги. В теории проверки
статистических гипотез вероятность
ошибки первого рода называется значимостью
критерия.
![]() —вероятность
ошибки второго рода.
В силу того, что подмножества G0
и G1
не пересекаются, имеем
—вероятность
ошибки второго рода.
В силу того, что подмножества G0
и G1
не пересекаются, имеем
![]() —вероятность
правильного решения о верности гипотезы
H0.
—вероятность
правильного решения о верности гипотезы
H0.
![]() —вероятность
правильного решения о верности гипотезы
H1
и называется мощностью
критерия. В
радиолокации она называется вероятностью
правильного обнаружения.
—вероятность
правильного решения о верности гипотезы
H1
и называется мощностью
критерия. В
радиолокации она называется вероятностью
правильного обнаружения.
Пользуясь функцией
правдоподобия
![]() ,
запишем соответствующие вероятности
в интегральной форме
,
запишем соответствующие вероятности
в интегральной форме




Как видно из формул,
вероятности ошибок зависят от правила
разбиения множества
![]() на два подмножества
на два подмножества![]() и
и![]() .
.
4.1.1. Критерий Байеса
В
качестве априорной информации наблюдатель
должен знать матрицу потерь
![]() ,
функцию правдоподобия
,
функцию правдоподобия![]() ,
,![]() ,
вероятности состояний источника
,
вероятности состояний источника![]() ,
,![]() таких, что
таких, что![]() ,
т.е. источник информации должен находиться
в одном из двух возможных состояний.
,
т.е. источник информации должен находиться
в одном из двух возможных состояний.
Запишем
матрицу потерь  ,
,
где
![]() ,
,
![]() ,
,
,
,![]() ,
,
![]() — потери при принятии гипотезы
— потери при принятии гипотезы
![]() в то время, как источник находится в
состоянии
в то время, как источник находится в
состоянии![]() .
Обычно
.
Обычно![]() — потери при правильных решениях должны
быть меньше потерь из-за неправильных
решений.
— потери при правильных решениях должны
быть меньше потерь из-за неправильных
решений.
Вычислим
средние условные потери (условные риски)
при верности гипотез
![]() и
и![]()
![]()
![]() +
+![]()
![]()
![]() +
+![]()
Безусловный риск (функция среднего риска) запишется как
![]()
![]()
![]()
![]()
Перепишем
средний риск
![]() в виде, удобном для анализа,
в виде, удобном для анализа,
 (4.3)
(4.3)
В
полученном выражении вероятности
![]() и
и![]() зависят от выбора подмножества
зависят от выбора подмножества![]() ,
а вероятность
,
а вероятность![]() зависит от выбора подмножества
зависит от выбора подмножества![]() .
.
В
силу того, что подмножества
![]() и
и![]() дополняют друг друга доG,
то достаточно указать, как выбирать
дополняют друг друга доG,
то достаточно указать, как выбирать
![]() ,
чтобы минимизировать
,
чтобы минимизировать![]() .
Область
.
Область![]() называетсякритической.
Чтобы привести области интегрирования
к одной области
называетсякритической.
Чтобы привести области интегрирования
к одной области
![]() ,
произведем замену
,
произведем замену![]() .
Тогда средний риск
.
Тогда средний риск![]() будет иметь вид
будет иметь вид
 (4.4)
(4.4)
Из
выражения (4.4) видно, для минимизации
среднего риска
![]() необходимо иметь максимально положительное
значение интеграла.
Если
подынтегральная функция будет принимать
положительные значения на множестве
необходимо иметь максимально положительное
значение интеграла.
Если
подынтегральная функция будет принимать
положительные значения на множестве
![]() ,
то значения интеграла будут неотрицательны.
Принимая это во внимание, отберём из
множества
,
то значения интеграла будут неотрицательны.
Принимая это во внимание, отберём из
множества![]() те значения
те значения![]() ,
которые обеспечивают не отрицательность
подынтегральной функции. Это множество
значений
,
которые обеспечивают не отрицательность
подынтегральной функции. Это множество
значений![]() составляет подмножество
составляет подмножество![]() из множества
из множества![]() ,
т.е. в подмножество
,
т.е. в подмножество![]() включены точки
включены точки
![]() которые удовлетворяют условию
которые удовлетворяют условию
![]()
или
 .
(4.5)
.
(4.5)
При
вычислении среднего риска
![]() интегрирование производилось по области
интегрирование производилось по области![]() .
Поэтому правилом принятия гипотезы
.
Поэтому правилом принятия гипотезы![]() будет выполнение неравенства (4.5).
Нарушение неравенства (4.5) говорит о
том, что вероятность получить выборку
фиксированного вида
будет выполнение неравенства (4.5).
Нарушение неравенства (4.5) говорит о
том, что вероятность получить выборку
фиксированного вида![]() при состоянии источника
при состоянии источника![]() больше,
по сравнению с вероятностью получить
ту же самую выборку при состоянии
источника
больше,
по сравнению с вероятностью получить
ту же самую выборку при состоянии
источника
![]() .
Поэтому при нарушении неравенства (4.5)
гипотезу
.
Поэтому при нарушении неравенства (4.5)
гипотезу![]() отвергают и более целесообразно считать
правдоподобной гипотезу
отвергают и более целесообразно считать
правдоподобной гипотезу![]() :
:![]() .
.
Правая
часть неравенства (4.5) постоянна и не
зависит от выборки
![]() и это
отношение
и это
отношение
 ,
зависящее
только от априорных сведений, называется
порогом
Байеса.
,
зависящее
только от априорных сведений, называется
порогом
Байеса.
Левая часть неравенства (4.5) представляет отношение правдоподобия. Перепишем неравенство (4.5) в виде
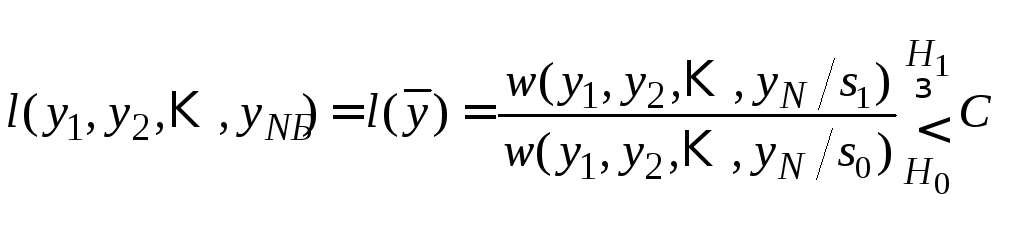 ,
(4.6)
,
(4.6)
в
котором символы
![]() и
и![]() указывают, какие гипотезы следует
принять при выполнении соответствующего
неравенства.
указывают, какие гипотезы следует
принять при выполнении соответствующего
неравенства.
Если
случайные величины
![]() независимы, отношение правдоподобия в
неравенстве (4.6) примет вид
независимы, отношение правдоподобия в
неравенстве (4.6) примет вид
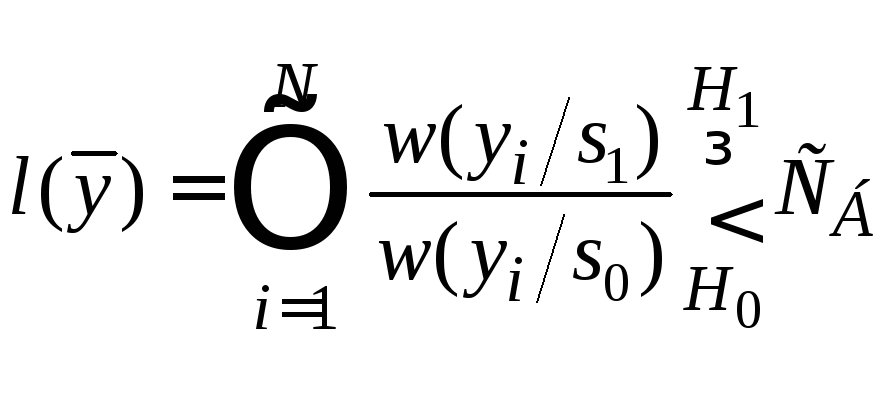 .
(4.7)
.
(4.7)
Неравенство(4.7)
является правилом обработки
последовательности независимых
наблюдений
![]() по критерию Байеса.
по критерию Байеса.