

Лекция 3 Закон сохранения момента импульса
Моментом силы
![]() относительно
неподвижной точки О (полюса)
называется векторная величина
относительно
неподвижной точки О (полюса)
называется векторная величина
![]() ,
равная векторному произведению
,
равная векторному произведению
![]() , где
, где
![]() –радиус-вектор,
проведённый из точки О в точку А
приложения силы.
–радиус-вектор,
проведённый из точки О в точку А
приложения силы.
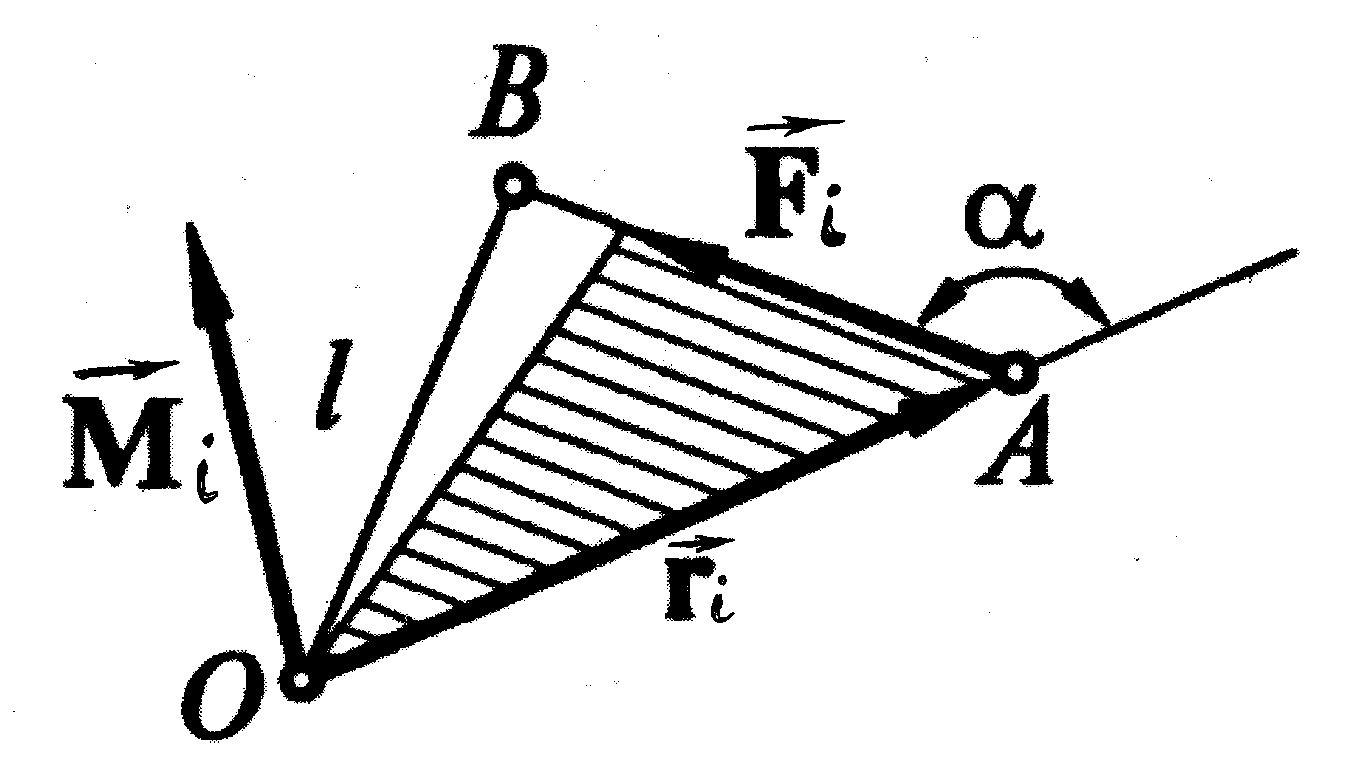
По модулю момент
силы равен
![]() , где
, где
![]() –плечо силы
–плечо силы
![]() –кратчайшее
расстояние
от точки О
до линии действия силы.
–кратчайшее
расстояние
от точки О
до линии действия силы.
Главным моментом
(результирующим)
системы сил относительно точки О
называется вектор
![]() ,
равный векторной сумме моментов
относительно точки О всех сил системы
,
равный векторной сумме моментов
относительно точки О всех сил системы
![]() .
.
Моментом импульса (моментом количества движения) материальной точки относительно неподвижной точки О (полюса) называют вектор
![]() , где
, где
тi
и
![]() – масса и скорость материальной точки.
– масса и скорость материальной точки.
Моментом импульса системы относительно неподвижной точки О называют векторную сумму моментов импульса относительно той же точки О всех материальных точек системы:
![]()
![]() .
.
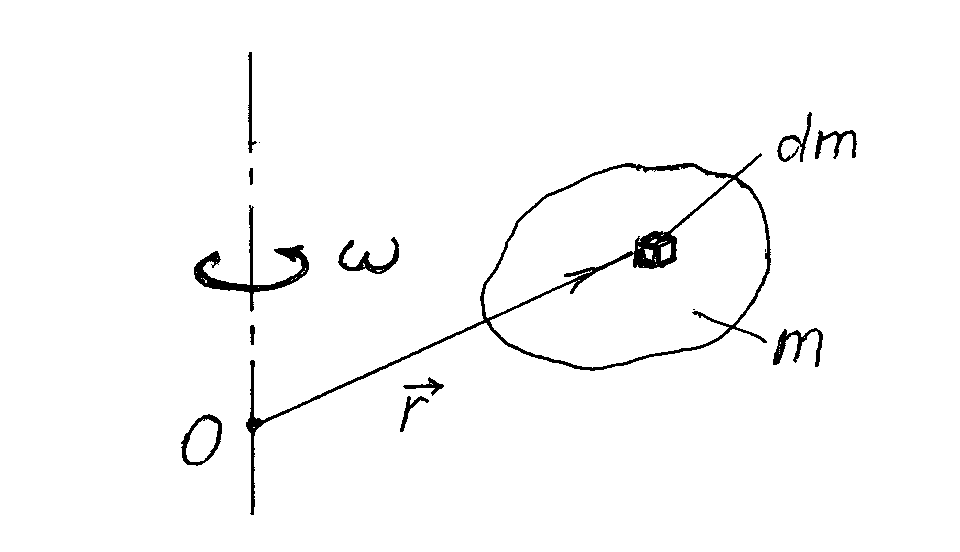
Если твёрдое тело
вращается с угловой скоростью
![]() вокруг точки О , томомент
импульса тела относительно неподвижной
точки О
вокруг точки О , томомент
импульса тела относительно неподвижной
точки О
![]() . где
. где
![]() –радиус-вектор,
проведённый из точки О в малый элемент
тела массой dm
;
–радиус-вектор,
проведённый из точки О в малый элемент
тела массой dm
;
![]() –скорость этого
элемента тела.
–скорость этого
элемента тела.
Поскольку
![]() – векторы
– векторы![]() и
и![]() в общем случае не совпадают по направлению
в общем случае не совпадают по направлению
![]() .
.
Моментом
инерции механической системы
относительно неподвижной оси![]() OZ
называется физическая величина JZ
, равная
OZ
называется физическая величина JZ
, равная
![]() ,
где
,
где
mi и Ri – масса i–й точки и её расстояние от оси OZ.
Момент инерции
твёрдого тела относительно
неподвижной оси
![]() OZ
OZ
![]() , где
, где
dm = ρ.dV – масса малого элемента тела объёмом dV;
ρ – плотность материала твёрдого тела;
R – расстояние от элемента dV до оси OZ.
Если тело однородно, т.е. его плотность всюду одинакова, то
![]() .
.
Момент инерции тела JZ является мерой инертности тела во вращательном движении вокруг неподвижной оси OZ подобно тому как масса тела является мерой его инертности в поступательном движении.
Момент инерции данного тела относительно какой-либо оси зависит не только от массы, формы и размеров тела, но также от положения тела по отношению к этой оси.
Согласно теореме Штейнера момент инерции тела JO относительно произвольной оси О равен сумме момента инерции тела JС относительно оси С, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела т на квадрат расстояния а между осями
JO = JC + m.а 2 .
Доказательство теоремы:
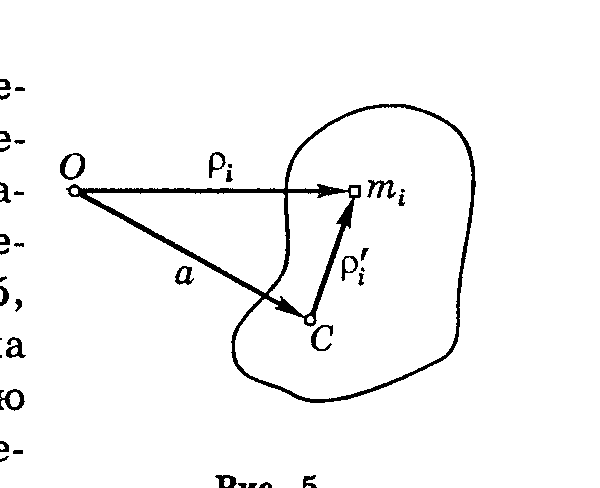
Пусть положение
i-го
элемента твёрдого тела относительно
осей О и С характеризуется векторами
![]() и
и![]() , а положение
оси С относительно оси О – вектором
, а положение
оси С относительно оси О – вектором
![]() ,
плоскость которого перпендикулярна
осям О и С . Воспользовавшись связью
между этими векторами
,
плоскость которого перпендикулярна
осям О и С . Воспользовавшись связью
между этими векторами![]() ,
преобразуем выражение для момента
инерции тела относительно оси О следующим
образом:
,
преобразуем выражение для момента
инерции тела относительно оси О следующим
образом:
![]() , или
, или
![]()
![]() .
.
В правой части этого равенства первая сумма представляет собой момент инерции тела JC i-го элемента твёрдого тела относительно оси С, а последняя сумма равна m.а 2. Покажем, что средняя сумма равна нулю.
Пусть
![]() – радиус-векторi-го
элемента твёрдого тела относительно
центра масс, тогда относительно центра
масс суммарный вектор
– радиус-векторi-го
элемента твёрдого тела относительно
центра масс, тогда относительно центра
масс суммарный вектор
![]() .
Но
.
Но![]() –
это составляющая вектора
–
это составляющая вектора![]() ,
перпендикулярная осям О и С . Очевидно,
что если суммарный вектор равен нулю,
то сумма его составляющих в плоскости,
перпендикулярной осям О и С , также
равна нулю, т.е.
,
перпендикулярная осям О и С . Очевидно,
что если суммарный вектор равен нулю,
то сумма его составляющих в плоскости,
перпендикулярной осям О и С , также
равна нулю, т.е.![]() и теорема доказана.
и теорема доказана.
Моменты инерции некоторых однородных твёрдых тел:
|
Тело |
Положение оси |
Момент инерции |
|
Обруч или полый тонкостенный цилиндр радиуса R и массы т |
Ось обруча или цилиндра |
mR2 |
|
Сплошной цилиндр или диск радиуса R и массы т |
Ось цилиндра или диска |
|
|
Шар радиуса R и массы т |
Ось проходит через центр шара |
|
|
Тонкостенная сфера радиуса R и массы т |
Ось проходит через центр сферы |
|
|
Прямой тонкий стержень длины l и массы т |
Ось перпендикулярна к стержню и проходит через его середину
Ось перпендикулярна к стержню и проходит через его конец |
|