

4.2.4. Задания для лабораторной работы.
Практическая часть лабораторной работы заключается в поиске оптимального управления линейной динамической системой
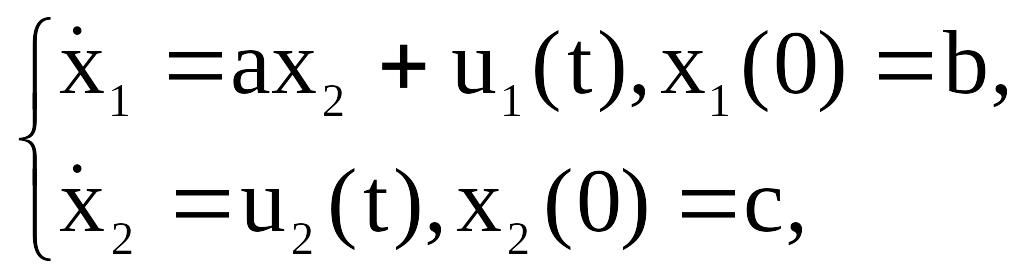
доставляющего минимум функционалу
![]() .
.
Таким образом, во всех вариантах размерность вектора фазового состояния n=2, размерность вектора управляющих воздействий r=2, начальный момент движения t0=0, конечный момент движения t2=2 .Остальные исходные данные задаются по вариантам
Номер варианта |
А |
В |
С |
1 |
0.2 |
1.0 |
2.0 |
2 |
0.2 |
1.2 |
1.8 |
3 |
0.5 |
1.4 |
1.6 |
4 |
0.5 |
0.8 |
1.4 |
5 |
0.8 |
0.6 |
1.2 |
6 |
0.8 |
1.5 |
1.0 |
7 |
1.0 |
0.7 |
2.2 |
8 |
1.0 |
0.5 |
2.4 |
Управление “нулевого” приближения предлагается задавать в виде постоянных функций u1(t)= u10=const, u2(t)= u20=const, "tÎ[0,2]; причем
–20 £ u10, u20£ 20.
Список литературы
1. Васильев Ф.П. Численные методы решения экстремальных задач. М.: Наука., 1980.
2. Лесин В.В., Лисовец Ю.П. Основы методов оптимизации. М.: Изд-во МАИ, 1995.
3. Мурга О.К., Численные методы оптимизации. Лабораторный практикум.-Казань: Изд-во Казан. гос. техн. ун-та, 2000.
4. Химмельблау Д. Прикладное нелинейное программирование. М.: Мир, 1975.